Download as pdf or txt
You might also like
- XMT8000 Temperature Controller Instruction: I. SpecificationDocument2 pagesXMT8000 Temperature Controller Instruction: I. SpecificationRoberto Ortega0% (1)
- Symmetric Root Locus LQR Design State Estimation: Selection of 'Optimal' Poles For SISO Pole Placement Design: SRLDocument22 pagesSymmetric Root Locus LQR Design State Estimation: Selection of 'Optimal' Poles For SISO Pole Placement Design: SRLP_leeNo ratings yet
- Frequency Responce Analysis - by Kenil JaganiDocument41 pagesFrequency Responce Analysis - by Kenil Jaganikeniljagani513No ratings yet
- System Design 10 - Time Domain AnalysisDocument14 pagesSystem Design 10 - Time Domain AnalysisSanjay RaajNo ratings yet
- Proportional & Integral Controllers: S K K S E S UDocument25 pagesProportional & Integral Controllers: S K K S E S UAvik GhoshNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- 4 Microsoft Word - L-12 - SS - IA - C - EE - NPTELDocument10 pages4 Microsoft Word - L-12 - SS - IA - C - EE - NPTELRicky RawNo ratings yet
- Some Past Exam Problems in Control Systems - Part 2Document5 pagesSome Past Exam Problems in Control Systems - Part 2vigneshNo ratings yet
- Lecture 3: State-Feedback, Observers, Reference Values, and Integrators Problem FormulationDocument8 pagesLecture 3: State-Feedback, Observers, Reference Values, and Integrators Problem FormulationAbbas AbbasiNo ratings yet
- 03b ModelingDocument28 pages03b ModelingAli FarhatNo ratings yet
- Model Predictive Control Lecture Handouts by Jan MaciejowskiDocument18 pagesModel Predictive Control Lecture Handouts by Jan Maciejowskimindthomas100% (1)
- Kalman 2Document25 pagesKalman 2Christian OkregheNo ratings yet
- I. Concepts and Tools: Mathematics For Dynamic SystemsDocument48 pagesI. Concepts and Tools: Mathematics For Dynamic SystemsRaveendhra IitrNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- High Gain ObserverDocument21 pagesHigh Gain ObserverGopakumarKodakkallingalNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- Generation of Synthetic Curves and Surfaces Using Matlab: - Nishant ChandrashekharDocument23 pagesGeneration of Synthetic Curves and Surfaces Using Matlab: - Nishant ChandrashekharvinayakNo ratings yet
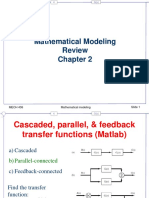
- Mathematic Modelling of Dynamic SYSTEMS Ch. 2Document31 pagesMathematic Modelling of Dynamic SYSTEMS Ch. 2Irtiza IshrakNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- LQG DesignDocument20 pagesLQG DesignMahmoud AbuziadNo ratings yet
- Lecture - 11 - Second LawDocument10 pagesLecture - 11 - Second LawMihai MirceaNo ratings yet
- OCDM2223 Tutorial7solvedDocument5 pagesOCDM2223 Tutorial7solvedqq727783No ratings yet
- POM Final FormulaDocument5 pagesPOM Final FormulaShawron weevNo ratings yet
- P19 IIR Filters Part2Document21 pagesP19 IIR Filters Part2Romit Raj SinghNo ratings yet
- PD, PI, PID Compensation: M. Sami Fadali Professor of Electrical Engineering University of NevadaDocument42 pagesPD, PI, PID Compensation: M. Sami Fadali Professor of Electrical Engineering University of NevadaAsghar AliNo ratings yet
- Assignment 1 SolutionDocument9 pagesAssignment 1 SolutiongowthamkurriNo ratings yet
- EE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-StateDocument30 pagesEE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-Statepremsanjith subramaniNo ratings yet
- Classical Control: Proportional, Integral, Derivative (PID) ControlDocument28 pagesClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanNo ratings yet
- Constants and Key Equations in Chemicall ReactionDocument5 pagesConstants and Key Equations in Chemicall ReactionFrancisca BrazNo ratings yet
- Unit One and ThreeDocument32 pagesUnit One and ThreeGAURAV RATHORENo ratings yet
- Classic Control and Compensators.-: Ut Et T Et DT + T Det DTDocument19 pagesClassic Control and Compensators.-: Ut Et T Et DT + T Det DTEdnna LpNo ratings yet
- Process ControlDocument55 pagesProcess ControlUmair IqbalNo ratings yet
- Synchronous Generator Transient Analysis: EE 4183 - Laboratory Practice VIDocument27 pagesSynchronous Generator Transient Analysis: EE 4183 - Laboratory Practice VIChathura DalugodaNo ratings yet
- Discrete PID Control: e Ps Pse S SDocument3 pagesDiscrete PID Control: e Ps Pse S SjayashreeNo ratings yet
- Control L2aDocument17 pagesControl L2avibhore mendirattaNo ratings yet
- J. Hetthéssy, A. Barta, R. Bars: DeadDocument5 pagesJ. Hetthéssy, A. Barta, R. Bars: DeadArulrajNo ratings yet
- Time Response of Systems: 10.1 Some Standard Time ResponsesDocument8 pagesTime Response of Systems: 10.1 Some Standard Time ResponseskiranNo ratings yet
- Kalman Filtering and LQG Control - Acs10-12 PDFDocument37 pagesKalman Filtering and LQG Control - Acs10-12 PDFTranNhanNo ratings yet
- Exercise 6: Time Series Analysis and Stochastic ModellingDocument18 pagesExercise 6: Time Series Analysis and Stochastic ModellingBikas C. BhattaraiNo ratings yet
- PID ExamplesDocument15 pagesPID ExamplesBaba YagaNo ratings yet
- Chapter 7: Quicksort: DivideDocument18 pagesChapter 7: Quicksort: DivideShaunak PatelNo ratings yet
- Dokumen - Tips Control Systems Lehigh University Inconsylabcssme389lectureslecture07pidpdfDocument9 pagesDokumen - Tips Control Systems Lehigh University Inconsylabcssme389lectureslecture07pidpdfعادل محمودNo ratings yet
- Time Response AnalysisDocument151 pagesTime Response AnalysisTushar GuptaNo ratings yet
- Basics of Feedback Control: Mechanical and Aerospace Engineering Cornell UniversityDocument36 pagesBasics of Feedback Control: Mechanical and Aerospace Engineering Cornell UniversityahmadNo ratings yet
- EEET2197 Tute8 SolnDocument14 pagesEEET2197 Tute8 SolnCollin lcwNo ratings yet
- Z TransformDocument22 pagesZ Transformvignanaraj100% (1)
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 pagesCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNo ratings yet
- Ziegler-Nichols Controller Tuning ExampleDocument6 pagesZiegler-Nichols Controller Tuning ExampleChristine AvdikouNo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- Lecture 2+modeling+ +Document60 pagesLecture 2+modeling+ +呀HongNo ratings yet
- Q G Q Q Q C Q Q M Q: Es La Variable de DesplazamientoDocument5 pagesQ G Q Q Q C Q Q M Q: Es La Variable de DesplazamientoJohn BeckerNo ratings yet
- PID Tuning Cohen Coon ExampleDocument8 pagesPID Tuning Cohen Coon ExamplegilangaspNo ratings yet
- Discrete Time SystemsDocument19 pagesDiscrete Time SystemsGoodNo ratings yet
- Pile-Up Correction of Gamma EmissionDocument14 pagesPile-Up Correction of Gamma EmissionIlia GildinNo ratings yet
- Problem Set 2 SolDocument7 pagesProblem Set 2 SolsristisagarNo ratings yet
- 446-07 Soln of DEs (N) - HandoutDocument8 pages446-07 Soln of DEs (N) - HandoutFrancisco HurtadoNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- GeckoSCRIPT PDFDocument21 pagesGeckoSCRIPT PDFD MNo ratings yet
- DC Motor ProjetDocument13 pagesDC Motor ProjetArT MgMNo ratings yet
- MotivationDocument11 pagesMotivationChandrashekar Reddy0% (1)
- Contoh REPORT Open Ended CONTROLDocument32 pagesContoh REPORT Open Ended CONTROLtiko lolipopNo ratings yet
- KDD 2020 阿里妈妈 - DCAF - A Dynamic Computation Allocation Framework for Online Serving SystemDocument8 pagesKDD 2020 阿里妈妈 - DCAF - A Dynamic Computation Allocation Framework for Online Serving SystemMYNo ratings yet
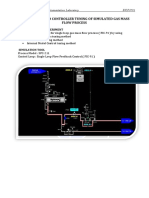
- Experiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessDocument6 pagesExperiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessPMNo ratings yet
- SF HF: 200V Class 0.2-7.5kW 400V Class 0.4-7.5kWDocument36 pagesSF HF: 200V Class 0.2-7.5kW 400V Class 0.4-7.5kWinvisiblevision4No ratings yet
- Fuzzy-Pid Based Indirect Incremental Conductance MPPT Algorithm For PV SystemDocument6 pagesFuzzy-Pid Based Indirect Incremental Conductance MPPT Algorithm For PV SystemAhmed.AhmedNo ratings yet
- Position Control and Trajectory Tracking of The Stewart PlatformDocument25 pagesPosition Control and Trajectory Tracking of The Stewart PlatformDuskoNo ratings yet
- A) Measure PDocument6 pagesA) Measure PNagarajapandian MNo ratings yet
- Self Balancing Robot Using PidDocument21 pagesSelf Balancing Robot Using Pidline follower robotNo ratings yet
- Various Types of ControllerDocument59 pagesVarious Types of ControllerZakariyaNo ratings yet
- 5101 ENG U2.1 ParticipantDocument370 pages5101 ENG U2.1 ParticipantJared TapiaNo ratings yet
- Electronic PID Controller Design ReportDocument19 pagesElectronic PID Controller Design ReportRatoka LekhemaNo ratings yet
- ECE 5570 - Lab 2 PID Control of A Brush DC Motor ObjectivesDocument5 pagesECE 5570 - Lab 2 PID Control of A Brush DC Motor ObjectivesAnimesh GhoshNo ratings yet
- User Manual: FKS-0-10.p65 16/09/99, 16.51 1Document34 pagesUser Manual: FKS-0-10.p65 16/09/99, 16.51 1Jose luisNo ratings yet
- Lista de Traps SNMP MUX CAP1000Document22 pagesLista de Traps SNMP MUX CAP10001000TON1980No ratings yet
- Eeg 6500Document14 pagesEeg 6500Jorge Mario Perdomo PerdomoNo ratings yet
- Delta Temperature Controller DT Series: Automation For A Changing WorldDocument24 pagesDelta Temperature Controller DT Series: Automation For A Changing WorldSHRAVAN KUMAR KOTHANo ratings yet
- Pi Tops DemoDocument54 pagesPi Tops DemoAndres JimenezNo ratings yet
- Fy700 Series TaieDocument9 pagesFy700 Series TaieHưng Phan HữuNo ratings yet
- Subramanyam Asu 0010N 18056 PDFDocument61 pagesSubramanyam Asu 0010N 18056 PDFKaushik RanaNo ratings yet
- PID File SpecificationDocument2 pagesPID File SpecificationjanuarfaNo ratings yet
- SF13 Series Wall Mounted Universal Controller: GeneralDocument20 pagesSF13 Series Wall Mounted Universal Controller: GeneralchinitnNo ratings yet
- Bossanyi 2000 Wind Energy PDFDocument15 pagesBossanyi 2000 Wind Energy PDFMani RajNo ratings yet
- Self-Balancing Robot Using Raspberry Pi and PID ControllerDocument2 pagesSelf-Balancing Robot Using Raspberry Pi and PID ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Calibration and Control of Servo TrainerDocument14 pagesCalibration and Control of Servo Trainersyedhamdan45No ratings yet
- NIST's Fully Dynamic Gravimetric Liquid Flowmeter Standard: 9th ISFFM Arlington, Virginia, April 14 To 17, 2015Document15 pagesNIST's Fully Dynamic Gravimetric Liquid Flowmeter Standard: 9th ISFFM Arlington, Virginia, April 14 To 17, 2015Reza AriaeeNo ratings yet
- Modelling and Control of Ball and Beam System Using PID ControllerDocument6 pagesModelling and Control of Ball and Beam System Using PID ControllerTới Hồ VănNo ratings yet