Download as pdf or txt
You might also like
- 2013 Maxxforce DT, 9, 10 Wiring DiagramsDocument2 pages2013 Maxxforce DT, 9, 10 Wiring DiagramsJhon Constantine91% (11)
- Diagramas Elétricos CAT D6NDocument2 pagesDiagramas Elétricos CAT D6NTatiano Brollo78% (9)
- Electr 725 & 730 Serie AltaDocument2 pagesElectr 725 & 730 Serie Altasebastian jaramillo trujilloNo ratings yet
- 980F Series II Wheel Loader Electrical System: Electrical Schematic Symbols and DefinitionsDocument2 pages980F Series II Wheel Loader Electrical System: Electrical Schematic Symbols and DefinitionsRafa GarciaNo ratings yet
- MPC5744P Functional Block DiagramsDocument4 pagesMPC5744P Functional Block DiagramsPhuRioNo ratings yet
- Sisteme Informatice În Energetică: Ș.L.DR - Ing. Nicoleta Arghira Prof - Dr.ing. Sergiu Stelian IliescuDocument31 pagesSisteme Informatice În Energetică: Ș.L.DR - Ing. Nicoleta Arghira Prof - Dr.ing. Sergiu Stelian Iliescudoctornegrila100% (1)
- Delta Programmable Logic Controller DVP Series: Automation For A Changing WorldDocument52 pagesDelta Programmable Logic Controller DVP Series: Automation For A Changing WorldcarlosmarciosfreitasNo ratings yet
- Delta Programmable Logic Controller DVP Series: Automation For A Changing WorldDocument52 pagesDelta Programmable Logic Controller DVP Series: Automation For A Changing WorldelkimezsNo ratings yet
- TIO Console: Stationary GantryDocument1 pageTIO Console: Stationary Gantryjairo castroNo ratings yet
- Delta Programmable Logic Controller DVP Series: Automation For A Changing WorldDocument52 pagesDelta Programmable Logic Controller DVP Series: Automation For A Changing Worlddetroja tusharNo ratings yet
- 02 BeneVision N17N15N12 Service Training V2.0 enDocument42 pages02 BeneVision N17N15N12 Service Training V2.0 enraul escobedoNo ratings yet
- Delta Ia-Plc DVP TP C en 20220906 PDFDocument52 pagesDelta Ia-Plc DVP TP C en 20220906 PDFSrirangaraj KesavarajuluNo ratings yet
- Delta Ia-Plc DVP TP C en 20210916Document52 pagesDelta Ia-Plc DVP TP C en 20210916jesus vicuñaNo ratings yet
- Delta DVP Series CatalogDocument52 pagesDelta DVP Series CatalogAlfonso Lopez toroNo ratings yet
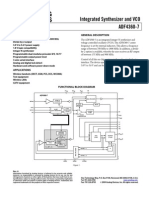
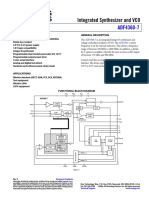
- Adf4360 7Document28 pagesAdf4360 7arulselvambeNo ratings yet
- Main Items BOQ Per SS: 4. Ethernet Switch 1. Control Panel & Panel Accessories 2. RTU System 5. Maintenance ToolsDocument1 pageMain Items BOQ Per SS: 4. Ethernet Switch 1. Control Panel & Panel Accessories 2. RTU System 5. Maintenance ToolsTarek KhafagaNo ratings yet
- SIPROTEC 5 Process Bus Solutions - Day1Document108 pagesSIPROTEC 5 Process Bus Solutions - Day1MasSla NerrazuriNo ratings yet
- EJEMPLO 3HAC024480-008 - Rev02Document10 pagesEJEMPLO 3HAC024480-008 - Rev02ipmcmtyNo ratings yet
- R2R2c EDocument2 pagesR2R2c Emohd safwan harunNo ratings yet
- Adf4360 7Document29 pagesAdf4360 7shhmmmNo ratings yet
- H 046 002371 00 iMEC Service Manual 5.0Document150 pagesH 046 002371 00 iMEC Service Manual 5.0Maria ArbelaezNo ratings yet
- 735, 740, & 740 EJECTOR Electrical System Articulated Truck: Harness and Wire Electrical Schematic SymbolsDocument2 pages735, 740, & 740 EJECTOR Electrical System Articulated Truck: Harness and Wire Electrical Schematic SymbolsKolo Bendu100% (1)
- 735, 740, and 740E Electrical System Articulated TruckDocument2 pages735, 740, and 740E Electrical System Articulated TruckАлександр Панкратов100% (1)
- Catalogo DeltaDocument48 pagesCatalogo DeltaWellington X Larusse de SandreNo ratings yet
- SCADA - DrawingDocument2 pagesSCADA - DrawingtrườngNo ratings yet
- Integrated Synthesizer and VCO: Data SheetDocument24 pagesIntegrated Synthesizer and VCO: Data SheetDUDULENo ratings yet
- 12H CBKDocument4 pages12H CBKMarildo DantasNo ratings yet
- Spare Items BOM - Per SSDocument1 pageSpare Items BOM - Per SSTarek KhafagaNo ratings yet
- Machine Harness Connector and Component Locations: 320C Excavator Electrical SystemDocument2 pagesMachine Harness Connector and Component Locations: 320C Excavator Electrical SystemMarcosnecoNo ratings yet
- Delta Ia-Plc DVP TP C en 20190517 WebDocument52 pagesDelta Ia-Plc DVP TP C en 20190517 WebKashif ZakaNo ratings yet
- 320C ElectricoDocument2 pages320C ElectricoArturoNo ratings yet
- 12H Series Baixa Com Motor EletronicoDocument4 pages12H Series Baixa Com Motor EletronicoLuan MaxNo ratings yet
- D6N Track-Type Tractor Electrical System: Harness and Wire Electrical Schematic SymbolsDocument2 pagesD6N Track-Type Tractor Electrical System: Harness and Wire Electrical Schematic SymbolsDavid Apaza HurtadoNo ratings yet
- w0719 Poster EVC-C D9 D12 D16 PDFDocument2 pagesw0719 Poster EVC-C D9 D12 D16 PDFabduallah muhammadNo ratings yet
- Level 3 Repair: 8-1. Components LayoutDocument53 pagesLevel 3 Repair: 8-1. Components Layoutالمخترع العربيNo ratings yet
- Embedded Engineer RoadMap 2022Document1 pageEmbedded Engineer RoadMap 2022CHEEDARA BHAVANI0% (1)
- 3BSE045751 en H Compact Product Suite - Clipart Config. Poster 500 x700 MMDocument1 page3BSE045751 en H Compact Product Suite - Clipart Config. Poster 500 x700 MMRuben HernandezNo ratings yet
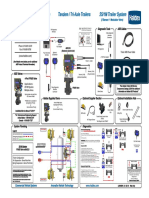
- PLC Select System 2S/1M Trailer System Tandem / Tri-Axle TrailersDocument1 pagePLC Select System 2S/1M Trailer System Tandem / Tri-Axle TrailersDimaNo ratings yet
- MCC Homepage P&WDocument1 pageMCC Homepage P&WTurboProject AdministracionNo ratings yet
- Platform NodeDocument5 pagesPlatform NodeCaraka TriNo ratings yet
- Switch Layer 3: Apartemen BalikpapanDocument1 pageSwitch Layer 3: Apartemen BalikpapanRomi ComateNo ratings yet
- DENSO Robotics Online EXPO Catalog Set en 1Document15 pagesDENSO Robotics Online EXPO Catalog Set en 1docteur stringoNo ratings yet
- 3DB20024CAAATNZZA04 - V1 - 9500 MPR MPT-HC-HQAMXP-HQAMMC Quick Start GuideDocument2 pages3DB20024CAAATNZZA04 - V1 - 9500 MPR MPT-HC-HQAMXP-HQAMMC Quick Start GuideWalcemir AguiarNo ratings yet
- SB 2Document27 pagesSB 2Belisario Sergio Llacchas rodasNo ratings yet
- Sistema Electrico 330D Motor c-9 330 PDFDocument2 pagesSistema Electrico 330D Motor c-9 330 PDFJilbher MorenoNo ratings yet
- 385C and 385C FS Excavator Electrical SystemDocument4 pages385C and 385C FS Excavator Electrical SystemNova kurniawan 34No ratings yet
- Lesson 4: Vital Information Display/Management SystemDocument21 pagesLesson 4: Vital Information Display/Management SystemMiguelNo ratings yet
- Delta Programmable Logic Controller DVP Series: e H T U B ADocument52 pagesDelta Programmable Logic Controller DVP Series: e H T U B AEmerson Müller Juarez AvilaNo ratings yet
- Delta Ia-Plc DVP TP C en 20180614 WebDocument52 pagesDelta Ia-Plc DVP TP C en 20180614 WebFahadNo ratings yet
- 17mb180e Service ManualDocument67 pages17mb180e Service Manualpeterbelm0% (1)
- Plano Electrico 988g 2twDocument4 pagesPlano Electrico 988g 2twOswaldo Andrade100% (1)
- M 2 U 054 Voelckk 4 Oko 0Document32 pagesM 2 U 054 Voelckk 4 Oko 0xuanben209No ratings yet
- Esquema Eléctrico (793D)Document4 pagesEsquema Eléctrico (793D)linko estradaNo ratings yet
- Squema Electrico 793 PDFDocument4 pagesSquema Electrico 793 PDFNemias AyalaNo ratings yet
- Visio-System ArchitectureDocument1 pageVisio-System ArchitectureZahid SaleemNo ratings yet
- 793D Electrico PDFDocument4 pages793D Electrico PDFminh le huuNo ratings yet
- 24H Motor Grader Electrical System: Electrical Schematic Symbols and DefinitionsDocument2 pages24H Motor Grader Electrical System: Electrical Schematic Symbols and Definitionsjose luis Cortés martinezNo ratings yet
- SCADA ConfigurationDocument1 pageSCADA ConfigurationDhammikeNo ratings yet
- Module 2 - Drawing PackageDocument198 pagesModule 2 - Drawing PackageAlif PrayogaNo ratings yet
- Module 1 - Control Architecture OverviewDocument128 pagesModule 1 - Control Architecture OverviewAlif PrayogaNo ratings yet
- Training Conv System BumperlineDocument12 pagesTraining Conv System BumperlineAlif PrayogaNo ratings yet
- Training Material PCS SystemDocument28 pagesTraining Material PCS SystemAlif PrayogaNo ratings yet
- Arduino 3000 Projects List - Ebook - Duino4ProjectsDocument297 pagesArduino 3000 Projects List - Ebook - Duino4ProjectsWise Tech100% (1)
- MoogDocument5 pagesMoogRajashekarNo ratings yet
- KS0086 ARDUBLOCK Graphical Programming Starter Kit PDFDocument75 pagesKS0086 ARDUBLOCK Graphical Programming Starter Kit PDFhexapodo2No ratings yet
- Accelnet Plus Module EtherCAT-AEM-Datasheet-DatasheetDocument28 pagesAccelnet Plus Module EtherCAT-AEM-Datasheet-Datasheetschnell.furiousNo ratings yet
- Bm114 Series: 6KW Auto-Focusing Laser Cutting Heads User ManualDocument33 pagesBm114 Series: 6KW Auto-Focusing Laser Cutting Heads User ManualLuis Fernando PinoNo ratings yet
- q172 173hcpu Motion SFCDocument344 pagesq172 173hcpu Motion SFCNghia TranNo ratings yet
- KNX sg001 - en PDocument234 pagesKNX sg001 - en PNelsonNo ratings yet
- Lab Report CS 11Document4 pagesLab Report CS 11ubaidNo ratings yet
- TDBFP Writeup KorbaDocument15 pagesTDBFP Writeup Korbamkgchem100% (2)
- Alarmas Omron SigmaII SGDHDocument3 pagesAlarmas Omron SigmaII SGDHDiego DiegoNo ratings yet
- CNDocument80 pagesCNedgardo roblesNo ratings yet
- Servo Motor ControlDocument13 pagesServo Motor ControlChirkov Kire100% (1)
- MR J2S A2 Instruction ManualDocument342 pagesMR J2S A2 Instruction ManualDiego TocancipaNo ratings yet
- Pipeline Inspection Robot-ReportDocument53 pagesPipeline Inspection Robot-ReportprojectzfourNo ratings yet
- CH 06Document18 pagesCH 06Abdul Shokor Abd TalibNo ratings yet
- Servo Motor & D.C Motor Interfacing With Atmega32Document33 pagesServo Motor & D.C Motor Interfacing With Atmega32Yash TripathiNo ratings yet
- Rotational Motor MECHATROLINK III Communications Reference Troubleshooting 3.1Document35 pagesRotational Motor MECHATROLINK III Communications Reference Troubleshooting 3.1Darwin DuqueNo ratings yet
- ALPHA5 Smart Catalog PDFDocument28 pagesALPHA5 Smart Catalog PDFCristopher EntenaNo ratings yet
- Autonomous Trash Collector Based On Object Detection Using Deep Neural NetworkDocument5 pagesAutonomous Trash Collector Based On Object Detection Using Deep Neural NetworkAnthony HuhoNo ratings yet
- Robotics by CFE MediaDocument55 pagesRobotics by CFE MediaMichael MatshonaNo ratings yet
- Arduino Starter KitDocument15 pagesArduino Starter Kitelektric2007No ratings yet
- Team2 Report FormattedDocument17 pagesTeam2 Report Formattedapi-453216223No ratings yet
- Lexium Servo PogoniDocument68 pagesLexium Servo PogoniСања БанковићNo ratings yet
- Ig SL7C 01Document54 pagesIg SL7C 01corazzaedwardNo ratings yet
- EE6511 CS B2 Lab ISO-2016Document39 pagesEE6511 CS B2 Lab ISO-2016shreeNo ratings yet
- Yas j3000Document186 pagesYas j3000gangan555No ratings yet
- S SeriesDocument284 pagesS SeriestatoddoNo ratings yet
- Alarm Parameter ManualDocument459 pagesAlarm Parameter ManualDenise Roper50% (2)
- Internal Verification of Assessment Decisions - BTEC (RQF) : Higher NationalsDocument69 pagesInternal Verification of Assessment Decisions - BTEC (RQF) : Higher NationalsAngeloNo ratings yet
- KD6031 2023 Output Transducers Section 8 (Wk11)Document34 pagesKD6031 2023 Output Transducers Section 8 (Wk11)mohamed redaNo ratings yet