
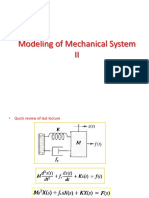
Modelling of Mechanical Systems - Control Systems - VIT Vellore
Modelling of Mechanical Systems - Control Systems - VIT Vellore
You might also like
- Pre-Purchase Final Report Sea LightDocument46 pagesPre-Purchase Final Report Sea LightCESAR VIECNTE100% (1)
- Pull Up EbookDocument12 pagesPull Up EbookDanko Kovačević100% (2)
- Product Manual Wooward 03035Document10 pagesProduct Manual Wooward 03035nabilaNo ratings yet
- Lecture 03 Translational Mechanical SystemsDocument18 pagesLecture 03 Translational Mechanical SystemsAhmad RazaNo ratings yet
- 3-Lecture 03 Translational Mechanical System3-SDocument23 pages3-Lecture 03 Translational Mechanical System3-SHamza KhanNo ratings yet
- Modelling of Mechanical System IIIDocument13 pagesModelling of Mechanical System IIIडॉ. इन्द्रसेन सिंहNo ratings yet
- Modeling of Mechanical System IIDocument11 pagesModeling of Mechanical System IIshrey saxenaNo ratings yet
- Lecture 03 Translational Mechanical SystemsDocument23 pagesLecture 03 Translational Mechanical SystemsShehroze TalatNo ratings yet
- FALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IDocument14 pagesFALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IRupam KunduNo ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- Chapter 5 - State Space RepresentationDocument37 pagesChapter 5 - State Space Representationvenosyah devanNo ratings yet
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringDocument24 pagesSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringAbdur RafayNo ratings yet
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- Unit 2: Modeling in The Frequency Domain Part 5: Modeling Translational Mechanical SystemsDocument14 pagesUnit 2: Modeling in The Frequency Domain Part 5: Modeling Translational Mechanical SystemsANo ratings yet
- Control SystemsDocument105 pagesControl SystemsVenkatesan Satheeswaran100% (1)
- Mechanical Systems: Translational RotationalDocument30 pagesMechanical Systems: Translational RotationalHussainNo ratings yet
- Notes 3 Translational Mechanical System Transfer FunctionDocument13 pagesNotes 3 Translational Mechanical System Transfer FunctionApek Suasana50% (2)
- Control Systems Engineering: Modeling in The Frequency DomainDocument138 pagesControl Systems Engineering: Modeling in The Frequency Domainghulam mustafaNo ratings yet
- Chapter 2Document7 pagesChapter 2Galal RabieNo ratings yet
- Physics Final - My VersionDocument48 pagesPhysics Final - My VersiondfbdbNo ratings yet
- OL17 Chap2 TFopampMechDocument16 pagesOL17 Chap2 TFopampMechpchakraborty201072No ratings yet
- Chapter 3: The Image, Its Mathematical and Physical BackgroundDocument53 pagesChapter 3: The Image, Its Mathematical and Physical BackgroundjeysamNo ratings yet
- Two-Degree-of-Freedom Systems: William J. Palm IIIDocument7 pagesTwo-Degree-of-Freedom Systems: William J. Palm IIIHensel KevinNo ratings yet
- Mathematical ModelDocument54 pagesMathematical ModelLEMANG GAMINGNo ratings yet
- Ee242 Ca1Document2 pagesEe242 Ca1omarsiddiqui8No ratings yet
- Department of Electrical Engineering, IIT Madras EE419: Digital Communication SystemsDocument7 pagesDepartment of Electrical Engineering, IIT Madras EE419: Digital Communication SystemsSalai JeyaseelanNo ratings yet
- Identification Methods For Structural Systems: Prof. Dr. Eleni Chatzi Lecture 4 - 09. March, 2016Document39 pagesIdentification Methods For Structural Systems: Prof. Dr. Eleni Chatzi Lecture 4 - 09. March, 2016ali381No ratings yet
- Signals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Document2 pagesSignals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Sudhakar JoshiNo ratings yet
- Modal AnalysisDocument14 pagesModal Analysismichael_r_reid652No ratings yet
- Clo1-Mathematical Modelling - Translational Mechanical SystemDocument38 pagesClo1-Mathematical Modelling - Translational Mechanical SystemKasri AzizNo ratings yet
- EE207 Problem Set 1 IIT ROPARDocument7 pagesEE207 Problem Set 1 IIT ROPARsumithasreekumar5No ratings yet
- W4 - Translational Mechanical System Transfer FunctionDocument15 pagesW4 - Translational Mechanical System Transfer FunctionMamoon KhanNo ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- TF TestDocument10 pagesTF TestnemaderakeshNo ratings yet
- Dynamic Systems EngineeringDocument13 pagesDynamic Systems EngineeringKimuli RayyanNo ratings yet
- Solution: Homework#1Document7 pagesSolution: Homework#1Marlon BlasaNo ratings yet
- Mdof23-L-V16-Red 2Document113 pagesMdof23-L-V16-Red 2nfaayedNo ratings yet
- Lecture 3. Filtering in The Frequency DomainDocument123 pagesLecture 3. Filtering in The Frequency DomainAshish PatelNo ratings yet
- Some Algorthim For Solving System of Linear Volterra Integral Equation of Second Kind by Using MATLAB 7Document11 pagesSome Algorthim For Solving System of Linear Volterra Integral Equation of Second Kind by Using MATLAB 7Carolina RibeiroNo ratings yet
- On Phase MarginDocument16 pagesOn Phase Marginchiyu10No ratings yet
- Vibrations 2dofDocument29 pagesVibrations 2dofbhukthaNo ratings yet
- Analysis of Vibration On Aerial Tramway Paper JETIR2004474Document11 pagesAnalysis of Vibration On Aerial Tramway Paper JETIR2004474aadithNo ratings yet
- Chapter2 1Document38 pagesChapter2 1hassen miberNo ratings yet
- Unit 6.4 and 6.5 HW KeyDocument4 pagesUnit 6.4 and 6.5 HW KeyOmar AshrafNo ratings yet
- Signals and Systems Class 17Document23 pagesSignals and Systems Class 17wizarderbrNo ratings yet
- ME2142 - Tut - 1 - With Answers PDFDocument3 pagesME2142 - Tut - 1 - With Answers PDFLin YushengNo ratings yet
- Lecture 7 SsDocument17 pagesLecture 7 Ssyab AbateNo ratings yet
- نسخة من Control Tutorial 2Document14 pagesنسخة من Control Tutorial 2eslamelshrwedy2000No ratings yet
- 2DOF Systems PDFDocument41 pages2DOF Systems PDFManavNo ratings yet
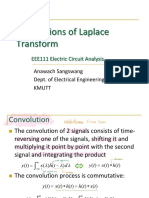
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- 052 DOFand MdofDocument42 pages052 DOFand MdofAbdelhay ElomariNo ratings yet
- 13.2 Line IntegralsDocument17 pages13.2 Line Integrals21142467No ratings yet
- Lecture 3 - Modelling of Mechanical Systems-Part B: Last TimeDocument8 pagesLecture 3 - Modelling of Mechanical Systems-Part B: Last TimeLE NgocNo ratings yet
- Vibration Chapter05Document77 pagesVibration Chapter05qistinaNo ratings yet
- ME6201 2012fall HW3 Solution PDFDocument11 pagesME6201 2012fall HW3 Solution PDFFaridehNo ratings yet
- ECE 461/561-001: Communication Systems Design: R TT E T T E T E TDocument5 pagesECE 461/561-001: Communication Systems Design: R TT E T T E T E TZhenyu HuoNo ratings yet
- Eigen Value Problem - MDOF Free VibrationDocument18 pagesEigen Value Problem - MDOF Free Vibrationbhupender ghosliyaNo ratings yet
- ME 411-Lecture 25Document10 pagesME 411-Lecture 25Harun SarıçamNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Hydrodynamic Characteristics of The Kort-Nozzle Propeller by Different Turbulence ModelsDocument4 pagesHydrodynamic Characteristics of The Kort-Nozzle Propeller by Different Turbulence ModelstafocanNo ratings yet
- Turbo Charger - ProjectDocument36 pagesTurbo Charger - ProjectSam Sams100% (2)
- Fish JordanDocument29 pagesFish JordanSarah SobhiNo ratings yet
- Caffeine in Tea by HPLCDocument3 pagesCaffeine in Tea by HPLCanita_shar29No ratings yet
- Gateway To Art - 1.08Document40 pagesGateway To Art - 1.08i am bubbleNo ratings yet
- Tc1057-Eng-10004 0 002 PDFDocument507 pagesTc1057-Eng-10004 0 002 PDFKenaia AdeleyeNo ratings yet
- Doctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina Dermatología, Carne Blancona, Carne Blancon, Piel Lechosa, Piel Lechoso, White Teen, Teenager, Playera, Playero, Leche, Helados, Nenita, They, Élle, Children, Bikini, Milky, Babe, Awards, Oraculo, Profeta, Clarividente, Profesias, Ufos, Ufo, OVNI, Ovni, Illuminati, Illumination, Reptil, Reptile, ET, Extraterrestre, Oraculos, Oasis, Vampiro, Vampiros, Vampire, Look, Loos, ¡Éxito! EDIT AVATAR, Beautiful, Baby, Hey There I Am Using, Balance, Balances, Debut, Debuts, Competidor, Competidora, Competidores, Espectáculos, Espectáculo, Espectacular, Fidalelfia, Doctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina DermatoDocument28 pagesDoctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina Dermatología, Carne Blancona, Carne Blancon, Piel Lechosa, Piel Lechoso, White Teen, Teenager, Playera, Playero, Leche, Helados, Nenita, They, Élle, Children, Bikini, Milky, Babe, Awards, Oraculo, Profeta, Clarividente, Profesias, Ufos, Ufo, OVNI, Ovni, Illuminati, Illumination, Reptil, Reptile, ET, Extraterrestre, Oraculos, Oasis, Vampiro, Vampiros, Vampire, Look, Loos, ¡Éxito! EDIT AVATAR, Beautiful, Baby, Hey There I Am Using, Balance, Balances, Debut, Debuts, Competidor, Competidora, Competidores, Espectáculos, Espectáculo, Espectacular, Fidalelfia, Doctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina DermatoMickey Miguel Montalvo CarranzaNo ratings yet
- To Study Well Design Aspects in HPHT EnvironmentDocument40 pagesTo Study Well Design Aspects in HPHT Environmentnikhil_barshettiwat100% (1)
- En02 PDFDocument20 pagesEn02 PDFIon VasilescuNo ratings yet
- The Bird CageDocument1 pageThe Bird CageNick BlueNo ratings yet
- BEEIE - Unit 4 & 5 Question BankDocument7 pagesBEEIE - Unit 4 & 5 Question Banksachin barathNo ratings yet
- Cambridge International AS Level: English General Paper 8021/22 February/March 2022Document11 pagesCambridge International AS Level: English General Paper 8021/22 February/March 2022Pat Patrick100% (1)
- Heat Exchanger PresentationDocument39 pagesHeat Exchanger PresentationZia UlmananNo ratings yet
- UBE-H-103 - Piping and Ducting MaterialDocument587 pagesUBE-H-103 - Piping and Ducting Materialjohn carterNo ratings yet
- Case Study TPM Jet AirwaysDocument15 pagesCase Study TPM Jet AirwaysSanjay Domdiya100% (1)
- FarmMachineryEquipment I ManualDocument51 pagesFarmMachineryEquipment I ManualBea SmithNo ratings yet
- The Ultimate Guide To Arduino LibraryDocument76 pagesThe Ultimate Guide To Arduino LibraryNguyễn Hòa75% (4)
- PCI EO MEG Pemex 2013 PDFDocument38 pagesPCI EO MEG Pemex 2013 PDFepesanoNo ratings yet
- Drugs For Chemical EngineeringDocument34 pagesDrugs For Chemical Engineeringshivakumar hrNo ratings yet
- Evaluation of Green Building in The Existing Building of The Department of The Environment of DKI Jakarta Province in The Order of Reducing Greenhouse Gas EmissionsDocument5 pagesEvaluation of Green Building in The Existing Building of The Department of The Environment of DKI Jakarta Province in The Order of Reducing Greenhouse Gas EmissionsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- XV NATCOSEB First CircularDocument2 pagesXV NATCOSEB First CircularMn HbkNo ratings yet
- Audi s6 2007 5.2l ManualDocument374 pagesAudi s6 2007 5.2l ManualMisael EspañaNo ratings yet
- Anatomy by DR Naser AlBarbariDocument24 pagesAnatomy by DR Naser AlBarbariTanmay JhulkaNo ratings yet
- 2024 Specimen Paper 2Document16 pages2024 Specimen Paper 2Ahmed Suhail YusoofNo ratings yet
- Manual Spare Parts DB540!72!07Document124 pagesManual Spare Parts DB540!72!07Gustavo CarvalhoNo ratings yet
- Wifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual CarefullyDocument24 pagesWifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual Carefullykari.junttilaNo ratings yet
- Free/Open Source Multibody and Aerodynamic Software For Aeroelastic Analysis of Wind TurbinesDocument14 pagesFree/Open Source Multibody and Aerodynamic Software For Aeroelastic Analysis of Wind TurbinesFrankNo ratings yet
























































































Download as pdf or txt
You might also like
- Pre-Purchase Final Report Sea LightDocument46 pagesPre-Purchase Final Report Sea LightCESAR VIECNTE100% (1)
- Pull Up EbookDocument12 pagesPull Up EbookDanko Kovačević100% (2)
- Product Manual Wooward 03035Document10 pagesProduct Manual Wooward 03035nabilaNo ratings yet
- Lecture 03 Translational Mechanical SystemsDocument18 pagesLecture 03 Translational Mechanical SystemsAhmad RazaNo ratings yet
- 3-Lecture 03 Translational Mechanical System3-SDocument23 pages3-Lecture 03 Translational Mechanical System3-SHamza KhanNo ratings yet
- Modelling of Mechanical System IIIDocument13 pagesModelling of Mechanical System IIIडॉ. इन्द्रसेन सिंहNo ratings yet
- Modeling of Mechanical System IIDocument11 pagesModeling of Mechanical System IIshrey saxenaNo ratings yet
- Lecture 03 Translational Mechanical SystemsDocument23 pagesLecture 03 Translational Mechanical SystemsShehroze TalatNo ratings yet
- FALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IDocument14 pagesFALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IRupam KunduNo ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- Chapter 5 - State Space RepresentationDocument37 pagesChapter 5 - State Space Representationvenosyah devanNo ratings yet
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringDocument24 pagesSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringAbdur RafayNo ratings yet
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- Unit 2: Modeling in The Frequency Domain Part 5: Modeling Translational Mechanical SystemsDocument14 pagesUnit 2: Modeling in The Frequency Domain Part 5: Modeling Translational Mechanical SystemsANo ratings yet
- Control SystemsDocument105 pagesControl SystemsVenkatesan Satheeswaran100% (1)
- Mechanical Systems: Translational RotationalDocument30 pagesMechanical Systems: Translational RotationalHussainNo ratings yet
- Notes 3 Translational Mechanical System Transfer FunctionDocument13 pagesNotes 3 Translational Mechanical System Transfer FunctionApek Suasana50% (2)
- Control Systems Engineering: Modeling in The Frequency DomainDocument138 pagesControl Systems Engineering: Modeling in The Frequency Domainghulam mustafaNo ratings yet
- Chapter 2Document7 pagesChapter 2Galal RabieNo ratings yet
- Physics Final - My VersionDocument48 pagesPhysics Final - My VersiondfbdbNo ratings yet
- OL17 Chap2 TFopampMechDocument16 pagesOL17 Chap2 TFopampMechpchakraborty201072No ratings yet
- Chapter 3: The Image, Its Mathematical and Physical BackgroundDocument53 pagesChapter 3: The Image, Its Mathematical and Physical BackgroundjeysamNo ratings yet
- Two-Degree-of-Freedom Systems: William J. Palm IIIDocument7 pagesTwo-Degree-of-Freedom Systems: William J. Palm IIIHensel KevinNo ratings yet
- Mathematical ModelDocument54 pagesMathematical ModelLEMANG GAMINGNo ratings yet
- Ee242 Ca1Document2 pagesEe242 Ca1omarsiddiqui8No ratings yet
- Department of Electrical Engineering, IIT Madras EE419: Digital Communication SystemsDocument7 pagesDepartment of Electrical Engineering, IIT Madras EE419: Digital Communication SystemsSalai JeyaseelanNo ratings yet
- Identification Methods For Structural Systems: Prof. Dr. Eleni Chatzi Lecture 4 - 09. March, 2016Document39 pagesIdentification Methods For Structural Systems: Prof. Dr. Eleni Chatzi Lecture 4 - 09. March, 2016ali381No ratings yet
- Signals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Document2 pagesSignals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Sudhakar JoshiNo ratings yet
- Modal AnalysisDocument14 pagesModal Analysismichael_r_reid652No ratings yet
- Clo1-Mathematical Modelling - Translational Mechanical SystemDocument38 pagesClo1-Mathematical Modelling - Translational Mechanical SystemKasri AzizNo ratings yet
- EE207 Problem Set 1 IIT ROPARDocument7 pagesEE207 Problem Set 1 IIT ROPARsumithasreekumar5No ratings yet
- W4 - Translational Mechanical System Transfer FunctionDocument15 pagesW4 - Translational Mechanical System Transfer FunctionMamoon KhanNo ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- TF TestDocument10 pagesTF TestnemaderakeshNo ratings yet
- Dynamic Systems EngineeringDocument13 pagesDynamic Systems EngineeringKimuli RayyanNo ratings yet
- Solution: Homework#1Document7 pagesSolution: Homework#1Marlon BlasaNo ratings yet
- Mdof23-L-V16-Red 2Document113 pagesMdof23-L-V16-Red 2nfaayedNo ratings yet
- Lecture 3. Filtering in The Frequency DomainDocument123 pagesLecture 3. Filtering in The Frequency DomainAshish PatelNo ratings yet
- Some Algorthim For Solving System of Linear Volterra Integral Equation of Second Kind by Using MATLAB 7Document11 pagesSome Algorthim For Solving System of Linear Volterra Integral Equation of Second Kind by Using MATLAB 7Carolina RibeiroNo ratings yet
- On Phase MarginDocument16 pagesOn Phase Marginchiyu10No ratings yet
- Vibrations 2dofDocument29 pagesVibrations 2dofbhukthaNo ratings yet
- Analysis of Vibration On Aerial Tramway Paper JETIR2004474Document11 pagesAnalysis of Vibration On Aerial Tramway Paper JETIR2004474aadithNo ratings yet
- Chapter2 1Document38 pagesChapter2 1hassen miberNo ratings yet
- Unit 6.4 and 6.5 HW KeyDocument4 pagesUnit 6.4 and 6.5 HW KeyOmar AshrafNo ratings yet
- Signals and Systems Class 17Document23 pagesSignals and Systems Class 17wizarderbrNo ratings yet
- ME2142 - Tut - 1 - With Answers PDFDocument3 pagesME2142 - Tut - 1 - With Answers PDFLin YushengNo ratings yet
- Lecture 7 SsDocument17 pagesLecture 7 Ssyab AbateNo ratings yet
- نسخة من Control Tutorial 2Document14 pagesنسخة من Control Tutorial 2eslamelshrwedy2000No ratings yet
- 2DOF Systems PDFDocument41 pages2DOF Systems PDFManavNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- 052 DOFand MdofDocument42 pages052 DOFand MdofAbdelhay ElomariNo ratings yet
- 13.2 Line IntegralsDocument17 pages13.2 Line Integrals21142467No ratings yet
- Lecture 3 - Modelling of Mechanical Systems-Part B: Last TimeDocument8 pagesLecture 3 - Modelling of Mechanical Systems-Part B: Last TimeLE NgocNo ratings yet
- Vibration Chapter05Document77 pagesVibration Chapter05qistinaNo ratings yet
- ME6201 2012fall HW3 Solution PDFDocument11 pagesME6201 2012fall HW3 Solution PDFFaridehNo ratings yet
- ECE 461/561-001: Communication Systems Design: R TT E T T E T E TDocument5 pagesECE 461/561-001: Communication Systems Design: R TT E T T E T E TZhenyu HuoNo ratings yet
- Eigen Value Problem - MDOF Free VibrationDocument18 pagesEigen Value Problem - MDOF Free Vibrationbhupender ghosliyaNo ratings yet
- ME 411-Lecture 25Document10 pagesME 411-Lecture 25Harun SarıçamNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Hydrodynamic Characteristics of The Kort-Nozzle Propeller by Different Turbulence ModelsDocument4 pagesHydrodynamic Characteristics of The Kort-Nozzle Propeller by Different Turbulence ModelstafocanNo ratings yet
- Turbo Charger - ProjectDocument36 pagesTurbo Charger - ProjectSam Sams100% (2)
- Fish JordanDocument29 pagesFish JordanSarah SobhiNo ratings yet
- Caffeine in Tea by HPLCDocument3 pagesCaffeine in Tea by HPLCanita_shar29No ratings yet
- Gateway To Art - 1.08Document40 pagesGateway To Art - 1.08i am bubbleNo ratings yet
- Tc1057-Eng-10004 0 002 PDFDocument507 pagesTc1057-Eng-10004 0 002 PDFKenaia AdeleyeNo ratings yet
- Doctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina Dermatología, Carne Blancona, Carne Blancon, Piel Lechosa, Piel Lechoso, White Teen, Teenager, Playera, Playero, Leche, Helados, Nenita, They, Élle, Children, Bikini, Milky, Babe, Awards, Oraculo, Profeta, Clarividente, Profesias, Ufos, Ufo, OVNI, Ovni, Illuminati, Illumination, Reptil, Reptile, ET, Extraterrestre, Oraculos, Oasis, Vampiro, Vampiros, Vampire, Look, Loos, ¡Éxito! EDIT AVATAR, Beautiful, Baby, Hey There I Am Using, Balance, Balances, Debut, Debuts, Competidor, Competidora, Competidores, Espectáculos, Espectáculo, Espectacular, Fidalelfia, Doctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina DermatoDocument28 pagesDoctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina Dermatología, Carne Blancona, Carne Blancon, Piel Lechosa, Piel Lechoso, White Teen, Teenager, Playera, Playero, Leche, Helados, Nenita, They, Élle, Children, Bikini, Milky, Babe, Awards, Oraculo, Profeta, Clarividente, Profesias, Ufos, Ufo, OVNI, Ovni, Illuminati, Illumination, Reptil, Reptile, ET, Extraterrestre, Oraculos, Oasis, Vampiro, Vampiros, Vampire, Look, Loos, ¡Éxito! EDIT AVATAR, Beautiful, Baby, Hey There I Am Using, Balance, Balances, Debut, Debuts, Competidor, Competidora, Competidores, Espectáculos, Espectáculo, Espectacular, Fidalelfia, Doctor Médico Médica, Doctorado, Maestría, Docto, Medic, Medicina Especializada, Médico Especialista, Álvaro Miguel Carranza Montalvo De Piel Más Blanca, Erudito, Mártir, Mesías, Clarividente, Especialista, Medicina DermatoMickey Miguel Montalvo CarranzaNo ratings yet
- To Study Well Design Aspects in HPHT EnvironmentDocument40 pagesTo Study Well Design Aspects in HPHT Environmentnikhil_barshettiwat100% (1)
- En02 PDFDocument20 pagesEn02 PDFIon VasilescuNo ratings yet
- The Bird CageDocument1 pageThe Bird CageNick BlueNo ratings yet
- BEEIE - Unit 4 & 5 Question BankDocument7 pagesBEEIE - Unit 4 & 5 Question Banksachin barathNo ratings yet
- Cambridge International AS Level: English General Paper 8021/22 February/March 2022Document11 pagesCambridge International AS Level: English General Paper 8021/22 February/March 2022Pat Patrick100% (1)
- Heat Exchanger PresentationDocument39 pagesHeat Exchanger PresentationZia UlmananNo ratings yet
- UBE-H-103 - Piping and Ducting MaterialDocument587 pagesUBE-H-103 - Piping and Ducting Materialjohn carterNo ratings yet
- Case Study TPM Jet AirwaysDocument15 pagesCase Study TPM Jet AirwaysSanjay Domdiya100% (1)
- FarmMachineryEquipment I ManualDocument51 pagesFarmMachineryEquipment I ManualBea SmithNo ratings yet
- The Ultimate Guide To Arduino LibraryDocument76 pagesThe Ultimate Guide To Arduino LibraryNguyễn Hòa75% (4)
- PCI EO MEG Pemex 2013 PDFDocument38 pagesPCI EO MEG Pemex 2013 PDFepesanoNo ratings yet
- Drugs For Chemical EngineeringDocument34 pagesDrugs For Chemical Engineeringshivakumar hrNo ratings yet
- Evaluation of Green Building in The Existing Building of The Department of The Environment of DKI Jakarta Province in The Order of Reducing Greenhouse Gas EmissionsDocument5 pagesEvaluation of Green Building in The Existing Building of The Department of The Environment of DKI Jakarta Province in The Order of Reducing Greenhouse Gas EmissionsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- XV NATCOSEB First CircularDocument2 pagesXV NATCOSEB First CircularMn HbkNo ratings yet
- Audi s6 2007 5.2l ManualDocument374 pagesAudi s6 2007 5.2l ManualMisael EspañaNo ratings yet
- Anatomy by DR Naser AlBarbariDocument24 pagesAnatomy by DR Naser AlBarbariTanmay JhulkaNo ratings yet
- 2024 Specimen Paper 2Document16 pages2024 Specimen Paper 2Ahmed Suhail YusoofNo ratings yet
- Manual Spare Parts DB540!72!07Document124 pagesManual Spare Parts DB540!72!07Gustavo CarvalhoNo ratings yet
- Wifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual CarefullyDocument24 pagesWifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual Carefullykari.junttilaNo ratings yet
- Free/Open Source Multibody and Aerodynamic Software For Aeroelastic Analysis of Wind TurbinesDocument14 pagesFree/Open Source Multibody and Aerodynamic Software For Aeroelastic Analysis of Wind TurbinesFrankNo ratings yet