Download as pdf or txt
You might also like
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Lec52 GeostatisticsDocument19 pagesLec52 GeostatisticsDIBINo ratings yet
- GPS Surveying Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, RoorkeeDocument12 pagesGPS Surveying Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, RoorkeeIsmail Farajpour100% (1)
- How GPS WorksDocument15 pagesHow GPS WorksWong_Hong_WeiNo ratings yet
- GPS Surveying Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, Roorkee Lecture - 07 GPS Positioning (Principle and Methods)Document16 pagesGPS Surveying Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, Roorkee Lecture - 07 GPS Positioning (Principle and Methods)Amrit SainiNo ratings yet
- How GPS Works: Satellite Ranging or Pseudo-RangesDocument10 pagesHow GPS Works: Satellite Ranging or Pseudo-RangesPedro61No ratings yet
- Presentation ON Global Positioning System: Guided ByDocument21 pagesPresentation ON Global Positioning System: Guided ByJayesh JainNo ratings yet
- Global Positioning System: Presented By: CGDocument21 pagesGlobal Positioning System: Presented By: CGskyrunmanNo ratings yet
- Lec 3Document29 pagesLec 3UNNATI AGRAWALNo ratings yet
- Surveying: Dr. Jayanta Kumar GhoshDocument258 pagesSurveying: Dr. Jayanta Kumar GhoshIsmail FarajpourNo ratings yet
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Please Explain How GPS System Work. Explainin Term of TrilaterationDocument6 pagesPlease Explain How GPS System Work. Explainin Term of TrilaterationMohammad Fajri Raazaq RamadhanNo ratings yet
- Lec19 GPS Based Automatic Variable Rate Fertilizer ApplicatorDocument15 pagesLec19 GPS Based Automatic Variable Rate Fertilizer ApplicatorDIBINo ratings yet
- Cba The GPSDocument7 pagesCba The GPSRodrigoPomaNo ratings yet
- Find A Position Using GPSDocument4 pagesFind A Position Using GPSKen Lim100% (1)
- GPS SystemDocument11 pagesGPS SystemAHMED SOHELNo ratings yet
- Gps Position CalculationDocument3 pagesGps Position CalculationJillianNo ratings yet
- The Global Positioning System: I. Introduction - What Is GPSDocument9 pagesThe Global Positioning System: I. Introduction - What Is GPSBruno LopesNo ratings yet
- GPS AccuracyDocument5 pagesGPS AccuracyIbnu Abdul AziesNo ratings yet
- Global Positioning Systems (The Ultimate Navigators) : R.V.Pradeep S.P.Satyanarayana K.Sharan KumarDocument7 pagesGlobal Positioning Systems (The Ultimate Navigators) : R.V.Pradeep S.P.Satyanarayana K.Sharan KumarSreedhar RamNo ratings yet
- Starting With GPS BasicsDocument2 pagesStarting With GPS BasicsHannah Mae GuimbonganNo ratings yet
- Lec 1Document22 pagesLec 1Rambabu KumarNo ratings yet
- Global Positioning SystemDocument12 pagesGlobal Positioning Systemapi-19799369No ratings yet
- How Does GPS WorkDocument4 pagesHow Does GPS WorkKaveesh SNo ratings yet
- GNSS - 2Document22 pagesGNSS - 2shreyayadav1121No ratings yet
- Gps Error Sources PDFDocument4 pagesGps Error Sources PDFPhillip0% (1)
- Real-Time Kinematic and Differential GPS: PrintDocument13 pagesReal-Time Kinematic and Differential GPS: PrintBijay Krishna Das100% (1)
- (Bhattacharya) (Lecture) Principles and Techniques of Modern Radar SystemsDocument12 pages(Bhattacharya) (Lecture) Principles and Techniques of Modern Radar SystemsJean-Hubert DelassaleNo ratings yet
- How GPS: (Global Positioning System)Document17 pagesHow GPS: (Global Positioning System)prtp_y8618No ratings yet
- Gps Receiver Design TutorialDocument3 pagesGps Receiver Design TutorialPete100% (1)
- Applications of GPSDocument3 pagesApplications of GPSDinesh KannanNo ratings yet
- Differential GPSDocument2 pagesDifferential GPSAimanNo ratings yet
- ResumenDocument26 pagesResumendario albaNo ratings yet
- Lec 2Document16 pagesLec 2MohammedKhalifaNo ratings yet
- The GPS and DGPS Are The SatelliteDocument1 pageThe GPS and DGPS Are The SatelliteAthena Lorie Carrillo BacaocoNo ratings yet
- Differential Gps Explained - 1993 - Anna's ArchiveDocument64 pagesDifferential Gps Explained - 1993 - Anna's ArchivetrazadosferroviariosNo ratings yet
- Doppler LogDocument21 pagesDoppler LogVasileios PantouvakisNo ratings yet
- Lecture 8Document10 pagesLecture 8osamazpNo ratings yet
- Site Surveying ReportDocument3 pagesSite Surveying Reportjake masonNo ratings yet
- Chapter 3 - GPS Errors and BiasesDocument27 pagesChapter 3 - GPS Errors and BiasesAgmas AbuyeNo ratings yet
- Doppler Log All You Need To KnowDocument21 pagesDoppler Log All You Need To KnowManoj BharatiNo ratings yet
- GPS PresentationDocument33 pagesGPS PresentationSamir DasNo ratings yet
- GPS TechnologyDocument8 pagesGPS TechnologyKunnam Hanuma ReddyNo ratings yet
- 2012 Physics Assessment TaskDocument5 pages2012 Physics Assessment TaskBenjamin PangNo ratings yet
- GPSDocument6 pagesGPSMuhammad MahadNo ratings yet
- Lec 1Document9 pagesLec 1Mahmoud KhalifaNo ratings yet
- Gps Data Logger Ew 11 09Document7 pagesGps Data Logger Ew 11 09henrydav_oNo ratings yet
- Aen 88Document6 pagesAen 88SssssjsjsjsjsNo ratings yet
- Kuliah04 Positioning GPSDocument10 pagesKuliah04 Positioning GPSOth'is WatngarninyNo ratings yet
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: AbstractGanesh VenkatesanNo ratings yet
- Surveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, KanpurDocument26 pagesSurveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, KanpurLaxman PathakNo ratings yet
- GPS Lab ManualDocument9 pagesGPS Lab Manualbinod2500No ratings yet
- Lec 2Document14 pagesLec 2Likhita UttamNo ratings yet
- Exam in 2D1426 Robotics and Autonomous SystemsDocument2 pagesExam in 2D1426 Robotics and Autonomous SystemsDiaconeasa IoanaNo ratings yet
- How Does GPS WorkDocument4 pagesHow Does GPS WorkHomero DVNo ratings yet
- What Is GPS SystemDocument16 pagesWhat Is GPS System12SCIA22SHRUTI SARVAIYANo ratings yet
- Practical Navigation for the Modern Boat Owner: Navigate Effectively by Getting the Most Out of Your Electronic DevicesFrom EverandPractical Navigation for the Modern Boat Owner: Navigate Effectively by Getting the Most Out of Your Electronic DevicesNo ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Collision Detection: Understanding Visual Intersections in Computer VisionFrom EverandCollision Detection: Understanding Visual Intersections in Computer VisionNo ratings yet
- Changes: Nil: This Chart Is A Part of Navigraph Charts and Is Intended For Flight Simulation Use OnlyDocument24 pagesChanges: Nil: This Chart Is A Part of Navigraph Charts and Is Intended For Flight Simulation Use Onlyisg0016No ratings yet
- Cjenik Metris2022Document4 pagesCjenik Metris2022bartulNo ratings yet
- TrujilloDocument8 pagesTrujillolhoyosrojasNo ratings yet
- I. Instrument Panels and LayoutsDocument21 pagesI. Instrument Panels and Layoutssnehil beharNo ratings yet
- G1000 NXi Reference GuideDocument182 pagesG1000 NXi Reference GuideCassiano CapellassiNo ratings yet
- FSB NAT Circle of Change 2018 1Document1 pageFSB NAT Circle of Change 2018 1George ChiotisNo ratings yet
- Jeppesen Chart ClinicDocument2 pagesJeppesen Chart Clinickriki_m100% (2)
- GBASDocument3 pagesGBASNguyễn Quốc MinhNo ratings yet
- Flight Instruments Review: Pitot-Static SystemDocument5 pagesFlight Instruments Review: Pitot-Static SystemromixrayzenNo ratings yet
- RNAV Training For ATC 2007Document156 pagesRNAV Training For ATC 2007Kaow SomskoolNo ratings yet
- Table of Rotorcraft Avionics Changes Classification Issue 03 - FinalDocument12 pagesTable of Rotorcraft Avionics Changes Classification Issue 03 - FinalAnonymous ucJM9AGdaNo ratings yet
- LDPL (Pula) : General InfoDocument11 pagesLDPL (Pula) : General InfoSeyi WilliamsNo ratings yet
- Lower Airspace RomaniaDocument1 pageLower Airspace RomaniaIsac Robert100% (1)
- Ehamvidp PDF 1693135808Document111 pagesEhamvidp PDF 1693135808Maurits VeenNo ratings yet
- Aips 2018 121Document18 pagesAips 2018 121Fernando ArevaloNo ratings yet
- Gulfstream SV PFDDocument3 pagesGulfstream SV PFDArslanKhan100% (1)
- QCM Aigle AzurDocument9 pagesQCM Aigle Azurektal3aNo ratings yet
- EPWAEDDB PDF 20jan24Document43 pagesEPWAEDDB PDF 20jan24Dawid ZborowskiNo ratings yet
- 777 FOTB Global Positioning System GPS Signal InterferenceDocument23 pages777 FOTB Global Positioning System GPS Signal Interferencechaleen leeNo ratings yet
- TAWSDocument8 pagesTAWSJorgeAcostaNo ratings yet
- ZSOFDocument21 pagesZSOFjoker hotNo ratings yet
- IFR Regulations Quick Reference: Pilot CurrencyDocument2 pagesIFR Regulations Quick Reference: Pilot CurrencyJohnNo ratings yet
- SPZ500CDocument310 pagesSPZ500CEleazar100% (1)
- G1000 / GFC 700 System Maintenance Manual Hawker Beechcraft Model 200/B200 Series King AirDocument314 pagesG1000 / GFC 700 System Maintenance Manual Hawker Beechcraft Model 200/B200 Series King AirMaury NoriegaNo ratings yet
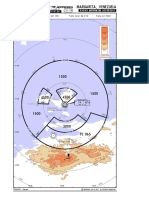
- SVMG/PMV Margarita, Venezuela: .Radar - Minimum.AltitudesDocument13 pagesSVMG/PMV Margarita, Venezuela: .Radar - Minimum.AltitudesDaniel BarreraNo ratings yet
- TOPIC 8,9,10 - MergedDocument88 pagesTOPIC 8,9,10 - MergedMuhammad AtifNo ratings yet
- AMIGA - A320 Airbus ManualDocument10 pagesAMIGA - A320 Airbus ManualjajagaborNo ratings yet
- Using The Garmin G1000 Glass CockpitDocument11 pagesUsing The Garmin G1000 Glass CockpitJohnNo ratings yet
- Doc.9849-EN Global Navigation Satellite System (GNSS) ManualDocument120 pagesDoc.9849-EN Global Navigation Satellite System (GNSS) ManualOmarchNo ratings yet
- Ata 22 - 10 Auto Flight - General 2Document48 pagesAta 22 - 10 Auto Flight - General 2Adiyanto PamungkasNo ratings yet