Download as pdf or txt
You might also like
- BeerVM11e PPT Ch12Document70 pagesBeerVM11e PPT Ch12brayanNo ratings yet
- The Philosophy of Andy WarholDocument1 pageThe Philosophy of Andy WarholMos Catalina0% (2)
- Ch12 Kinetics of Particles Newton's Second LawDocument38 pagesCh12 Kinetics of Particles Newton's Second Lawinfolearning75% (4)
- TOPIC 1 (Week 1) Kinematics of Particles (Rectilinear Motion)Document32 pagesTOPIC 1 (Week 1) Kinematics of Particles (Rectilinear Motion)the uneyNo ratings yet
- BeerVM11e PPT Ch11Document92 pagesBeerVM11e PPT Ch11brayanNo ratings yet
- 10 MRST InstallationDocument3 pages10 MRST InstallationhenryNo ratings yet
- 3 MEC420 - Kinetics of Particles - Force - AccDocument39 pages3 MEC420 - Kinetics of Particles - Force - AccBella MNo ratings yet
- MEC420 - 2 - Kinetics of Particles - Force - AccDocument39 pagesMEC420 - 2 - Kinetics of Particles - Force - Accsimon georgeNo ratings yet
- Kinematics of Particle Newtons 2nd LawDocument38 pagesKinematics of Particle Newtons 2nd LawYoshi Baswara ParamaNo ratings yet
- Dynamics - Chapter 12Document38 pagesDynamics - Chapter 12Hamza PagaNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument38 pagesDynamics: Vector Mechanics For EngineersAmanda Cruz Dos SantosNo ratings yet
- DynamicsDocument38 pagesDynamicsJoseph JeremyNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument28 pagesDynamics: Vector Mechanics For EngineersYoshi Baswara ParamaNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument28 pagesDynamics: Vector Mechanics For Engineers김현조/학생/조선해양공학No ratings yet
- CHAP12 Kinetics of Particles Newtons2Law PDFDocument38 pagesCHAP12 Kinetics of Particles Newtons2Law PDFwahidNo ratings yet
- Announcement: - Due, Next Wednesday, 07/19/2006!Document25 pagesAnnouncement: - Due, Next Wednesday, 07/19/2006!Marcel CadayNo ratings yet
- Chapter12 HandoutDocument38 pagesChapter12 HandoutRegine OlayaNo ratings yet
- Chapter 8 - Kinetics of Particles - Newton's 2ND Law of MotionDocument20 pagesChapter 8 - Kinetics of Particles - Newton's 2ND Law of Motionfarah amaniNo ratings yet
- Chapter 8 - Kinetics of Particles - Newton's 2nd Law of MotionDocument14 pagesChapter 8 - Kinetics of Particles - Newton's 2nd Law of MotionrushdiNo ratings yet
- MEC420 - Kinematics of ParticlesDocument55 pagesMEC420 - Kinematics of ParticlesWaIe AzfarNo ratings yet
- 12 Dynamics LectureDocument73 pages12 Dynamics Lecturechalove2uNo ratings yet
- 1-Kinematics of Particles معدلة-1Document29 pages1-Kinematics of Particles معدلة-1a42048517No ratings yet
- Dynamics: Vector Mechanics For EngineersDocument89 pagesDynamics: Vector Mechanics For EngineersEngra FithreeaNo ratings yet
- Dynamics11lecture PDFDocument89 pagesDynamics11lecture PDFEngra FithreeaNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument25 pagesDynamics: Vector Mechanics For EngineersJeff Manalo SaligumbaNo ratings yet
- CH 11Document62 pagesCH 11Abdel Naser Abu RabeNo ratings yet
- Kinetics of Particles Lecture Note (2nd Newton Law)Document40 pagesKinetics of Particles Lecture Note (2nd Newton Law)Ainni MazlanNo ratings yet
- Beer Vme9e Powerpoint Slides To Chapter 01Document9 pagesBeer Vme9e Powerpoint Slides To Chapter 01khizeraftab1018No ratings yet
- MEC420 - 3 - Kinetics of Particles - Work - ImpluseDocument69 pagesMEC420 - 3 - Kinetics of Particles - Work - Implusesimon georgeNo ratings yet
- 11 Lecture PPT Rectilinear Motion PDFDocument42 pages11 Lecture PPT Rectilinear Motion PDFЦедіе РамосNo ratings yet
- Engineering MechanicsDocument9 pagesEngineering Mechanicsroman leeNo ratings yet
- CH 01Document8 pagesCH 01Albert Miyer Suarez CastrillonNo ratings yet
- Chapter 1Document8 pagesChapter 1Florife LiwanagNo ratings yet
- Statics: Vector Mechanics For EngineersDocument8 pagesStatics: Vector Mechanics For EngineersAgus KusnayatNo ratings yet
- Statics: Vector Mechanics For EngineersDocument8 pagesStatics: Vector Mechanics For EngineersNidushan NethsaraNo ratings yet
- Presentacion Capitulo 11Document49 pagesPresentacion Capitulo 11Molina GabrielaNo ratings yet
- Dynamics - Chapter 11Document51 pagesDynamics - Chapter 11Hamza PagaNo ratings yet
- Statics: Vector Mechanics For EngineersDocument8 pagesStatics: Vector Mechanics For EngineersinfolearningNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument61 pagesDynamics: Vector Mechanics For Engineersgerango2010No ratings yet
- Statics: Vector Mechanics For EngineersDocument12 pagesStatics: Vector Mechanics For EngineersMohd Syafiq AkmalNo ratings yet
- CHP 13Document23 pagesCHP 13أحمد دناورNo ratings yet
- Vector Mechanics For Engineers: Dynamics: Twelfth EditionDocument73 pagesVector Mechanics For Engineers: Dynamics: Twelfth EditionFady MagedNo ratings yet
- Kinetics of Particles: Newton's Second Law: - IntroductionDocument41 pagesKinetics of Particles: Newton's Second Law: - IntroductionKoh Boon LiNo ratings yet
- Statics: Vector Mechanics For EngineersDocument15 pagesStatics: Vector Mechanics For EngineersSu KelesogluNo ratings yet
- Statics: Vector Mechanics For EngineersDocument8 pagesStatics: Vector Mechanics For EngineersMiray KoçakNo ratings yet
- Kinetics of ParticleDocument20 pagesKinetics of ParticleAkankshaNo ratings yet
- CHAPTER 12 - Kinetics of Particles Newton's Second LawDocument43 pagesCHAPTER 12 - Kinetics of Particles Newton's Second Lawsirajulislam921354No ratings yet
- Statics: Vector Mechanics For EngineersDocument9 pagesStatics: Vector Mechanics For EngineersAizuddinNo ratings yet
- Kinematics Lec 1Document18 pagesKinematics Lec 1saadbutt43215No ratings yet
- Ch11 - Part1B+Kinetics of Particle Newtons LawDocument51 pagesCh11 - Part1B+Kinetics of Particle Newtons LawSutapa NaskarNo ratings yet
- Checklist m1Document2 pagesChecklist m1Arwa HamdiNo ratings yet
- ch01 1Document4 pagesch01 1Nasr alzorikeNo ratings yet
- Dinamika II 2Document50 pagesDinamika II 2IvalNo ratings yet
- Basics of MechanicsDocument12 pagesBasics of MechanicsVan MontalboNo ratings yet
- C1 IntroductionDocument8 pagesC1 IntroductionGSaurav DahalNo ratings yet
- Dynamics - Chapter 17Document35 pagesDynamics - Chapter 17Hamza PagaNo ratings yet
- CH 01Document8 pagesCH 01Nabeel AhmedNo ratings yet
- Vector Mechanics Chapter 10Document49 pagesVector Mechanics Chapter 10Md. Ahsanur RahmanNo ratings yet
- Lecture2222 17728 Moment of Inertia Lec 2224Document26 pagesLecture2222 17728 Moment of Inertia Lec 2224NIRANJAN C.SNo ratings yet
- MEC420 - 4 - Kinematics of RBDocument66 pagesMEC420 - 4 - Kinematics of RBsimon georgeNo ratings yet
- DefinitionsDocument7 pagesDefinitionsr8jrqkhzwgNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4No ratings yet
- MEC420 4 Kinematics of RBDocument66 pagesMEC420 4 Kinematics of RBAzib JuriNo ratings yet
- MEC420 3 Kinetics of Particles Work ImpluseDocument69 pagesMEC420 3 Kinetics of Particles Work ImpluseAzib JuriNo ratings yet
- Jejari Gerbezaandun8rfatikutcnionik: BerkalaDocument3 pagesJejari Gerbezaandun8rfatikutcnionik: BerkalaAzib JuriNo ratings yet
- MEC420 8 Kinetics of RBDocument52 pagesMEC420 8 Kinetics of RBAzib JuriNo ratings yet
- MEC420 1 KinematicsPDocument55 pagesMEC420 1 KinematicsPAzib JuriNo ratings yet
- MEC420 - 5 - Moments and Product of InertiaDocument10 pagesMEC420 - 5 - Moments and Product of InertiaAzib JuriNo ratings yet
- Preliminary Report CSR - Crowdfunding For Tahfiz Darul Ulama PDFDocument25 pagesPreliminary Report CSR - Crowdfunding For Tahfiz Darul Ulama PDFAzib JuriNo ratings yet
- 3.0 Mec600 Po8 Rubric Seminar 31 Oct 2020Document23 pages3.0 Mec600 Po8 Rubric Seminar 31 Oct 2020Azib JuriNo ratings yet
- MEM601 - Syllabus & Assessment PDFDocument12 pagesMEM601 - Syllabus & Assessment PDFAzib JuriNo ratings yet
- Tahfiz Darul Ulama ProposalDocument2 pagesTahfiz Darul Ulama ProposalAzib JuriNo ratings yet
- CHAPTER 2.1 - Act and Regulation - Occupational Safety and Health PDFDocument26 pagesCHAPTER 2.1 - Act and Regulation - Occupational Safety and Health PDFAzib JuriNo ratings yet
- Chapter 3-6 Biological Hazards PDFDocument28 pagesChapter 3-6 Biological Hazards PDFAzib JuriNo ratings yet
- Chemisty Form FactsDocument2 pagesChemisty Form FactsAzib JuriNo ratings yet
- Reading TextsDocument6 pagesReading TextsAbd TalepNo ratings yet
- Submitted By-Rashmi Parmar (8601) Trisha Sinha Roy (8629) Sanchari Mohanta (8631) Raunak Shirali (8609) Karan Khot (8615) Swapnil Kulkarni (8625)Document38 pagesSubmitted By-Rashmi Parmar (8601) Trisha Sinha Roy (8629) Sanchari Mohanta (8631) Raunak Shirali (8609) Karan Khot (8615) Swapnil Kulkarni (8625)Vipul PartapNo ratings yet
- MT - Aplikasi SPL Pada TrussDocument3 pagesMT - Aplikasi SPL Pada TrussRivan SeptianNo ratings yet
- Recal 2019.Document27 pagesRecal 2019.mussab100% (2)
- August 2013: Zion'S Lutheran ChurchDocument10 pagesAugust 2013: Zion'S Lutheran ChurchConnie AllgireNo ratings yet
- The Sloop's Log Fall 2014Document20 pagesThe Sloop's Log Fall 2014Chebeague Island Historical SocietyNo ratings yet
- HCIA-Security V3.0 Exam OutlineDocument2 pagesHCIA-Security V3.0 Exam OutlinealiorkunNo ratings yet
- Rama 2Document3 pagesRama 2Ramasubba ReddyNo ratings yet
- Fibre Optics - PDFDocument56 pagesFibre Optics - PDFgroverpranjal34No ratings yet
- NSDL Conso File FVU Error Code ListDocument22 pagesNSDL Conso File FVU Error Code Listlekireddy33% (9)
- d2l enDocument982 pagesd2l enAbhinavNo ratings yet
- Trouble Shooting Capacitor Regulated Pancake Light Tower GeneratorsDocument7 pagesTrouble Shooting Capacitor Regulated Pancake Light Tower GeneratorsBilly MecanizadoNo ratings yet
- Laporan Bulanan Data Center CyberDocument11 pagesLaporan Bulanan Data Center CyberDeden Andri Maulana SyamsudinNo ratings yet
- Studentzone 02 2017Document3 pagesStudentzone 02 2017YahiaEl-obidyNo ratings yet
- On Commercial Aviation Safety: AUTUMN 2000Document26 pagesOn Commercial Aviation Safety: AUTUMN 2000Alex AlonsoNo ratings yet
- Patnership NotesDocument3 pagesPatnership NotesMario Jr ShetyNo ratings yet
- Architectural Design 9 Thesis Research Writing: 3 Proposal DraftDocument7 pagesArchitectural Design 9 Thesis Research Writing: 3 Proposal DraftVANESSA DELA TORRENo ratings yet
- Chapter 1 - Basic Concepts and Computer EvolutionDocument23 pagesChapter 1 - Basic Concepts and Computer EvolutionM KalaounNo ratings yet
- Repayment Schedule - 164916682Document1 pageRepayment Schedule - 164916682Shivashakthi MaheshNo ratings yet
- Disjuntor SF1 - Dados ElétricosDocument1 pageDisjuntor SF1 - Dados ElétricosotavioalcaldeNo ratings yet
- Current Issues, Status and Applications of GIS To Marine FisheriesDocument33 pagesCurrent Issues, Status and Applications of GIS To Marine FisheriesKyran Joeffer EsporlasNo ratings yet
- 04 Dev275 s00Document10 pages04 Dev275 s00Vishnu PatidarNo ratings yet
- Navbelt and GuidecaneDocument11 pagesNavbelt and GuidecaneSwathi Bhattiprolu100% (1)
- November 2023 Timetable Zone 2Document12 pagesNovember 2023 Timetable Zone 2Horror666No ratings yet
- Tech Guide in Wire SelectionDocument7 pagesTech Guide in Wire SelectionLowell ValienteNo ratings yet
- Variable Pitch Fan System - If EquippedDocument3 pagesVariable Pitch Fan System - If EquippedEVER DAVID SAAVEDRA HUAYHUANo ratings yet
- EPACII PCP Operational ManualDocument118 pagesEPACII PCP Operational ManualSergey ZaytsevNo ratings yet
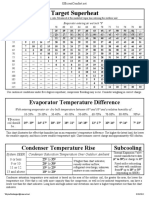
- Charging and TD Chart PlusDocument1 pageCharging and TD Chart PlusFaquruddin AliNo ratings yet