
Nefedtsev (2020)
Nefedtsev (2020)
You might also like
- Physics of The Ferroelectric Nonvolatile Memory Field Effect TransistorDocument13 pagesPhysics of The Ferroelectric Nonvolatile Memory Field Effect Transistornewgeneration0% (1)
- NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slotting (Yongchao Wang, Hui Gao, Haiyang Wang etc.) (Z-Library)Document17 pagesNVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slotting (Yongchao Wang, Hui Gao, Haiyang Wang etc.) (Z-Library)zdrahalNo ratings yet
- 7 StartupDocument8 pages7 StartupasadNo ratings yet
- Model of A Diffuse Column Vacuum Arc With Cathode Jets Burning in Parallel With A High-Current Plasma ColumnDocument9 pagesModel of A Diffuse Column Vacuum Arc With Cathode Jets Burning in Parallel With A High-Current Plasma Columnahmedmagdy161992No ratings yet
- 1990 Richard Alpha Power Law Mosfet Model PDFDocument11 pages1990 Richard Alpha Power Law Mosfet Model PDFrahmanakberNo ratings yet
- PhysicsDocument30 pagesPhysicsnewgetzNo ratings yet
- Modeling and Control The Set of Matrix Converter-Two Five-Phase Wheel Motors (2 PMSM) For Driving An Electric Traction SystemDocument7 pagesModeling and Control The Set of Matrix Converter-Two Five-Phase Wheel Motors (2 PMSM) For Driving An Electric Traction SystemBENALI YOUCEF MohammedNo ratings yet
- Electrical-Model of ADITYA-U TokamakDocument8 pagesElectrical-Model of ADITYA-U TokamakRija RehmanNo ratings yet
- Electronics 09 01748Document15 pagesElectronics 09 01748ihab benayacheNo ratings yet
- Huacai2013 PDFDocument6 pagesHuacai2013 PDFIslo BenNo ratings yet
- Jurnal BNCTDocument7 pagesJurnal BNCTarnetaNo ratings yet
- A Novel Cogging Torque Simulation Method For Permanent Magnet Synchronous MachinesDocument14 pagesA Novel Cogging Torque Simulation Method For Permanent Magnet Synchronous Machinestejas9280No ratings yet
- New Analytical Model For Nanoscale Tri-Gate SOI MOSFETs Including Quantum EffectsDocument7 pagesNew Analytical Model For Nanoscale Tri-Gate SOI MOSFETs Including Quantum EffectsN.B.balamuruganNo ratings yet
- Ahmed 2020 Jpn. J. Appl. Phys. 59 106001Document10 pagesAhmed 2020 Jpn. J. Appl. Phys. 59 106001momoNo ratings yet
- KESSELL Et Al., 2009Document37 pagesKESSELL Et Al., 2009Diêgo PiresNo ratings yet
- 10th Eco-Energy and Materials Science and Engineering (EMSES2012) Voltage Control by DQ Frame Technique of SVPWM AC-DC ConverterDocument10 pages10th Eco-Energy and Materials Science and Engineering (EMSES2012) Voltage Control by DQ Frame Technique of SVPWM AC-DC ConverterJustin SitohangNo ratings yet
- VLSI V Lab N-1Document20 pagesVLSI V Lab N-1Dhiraj PrakashNo ratings yet
- Permanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMDocument8 pagesPermanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMQamilNo ratings yet
- Effects of Divertor Geometry On Tokamak Plasmas: Review ArticleDocument42 pagesEffects of Divertor Geometry On Tokamak Plasmas: Review ArticleEleomar LenaNo ratings yet
- Trapezoidal PWM Scheme For Cascaded Multilevel InverterDocument5 pagesTrapezoidal PWM Scheme For Cascaded Multilevel InverterRodovarNo ratings yet
- Mosfet Gate DriveDocument6 pagesMosfet Gate DrivegubiliNo ratings yet
- Azzouz I 2005Document6 pagesAzzouz I 2005Leonardo SicchieriNo ratings yet
- Tokamak StartupDocument8 pagesTokamak StartupasadNo ratings yet
- Grid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsDocument6 pagesGrid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsAayesha AhmedNo ratings yet
- Practical Induction 01Document5 pagesPractical Induction 01sathishNo ratings yet
- NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor SlottingDocument16 pagesNVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slottingreddy venkata krishnaNo ratings yet
- Modeling of New High Voltage Power Supply With Three-Phase Character For Microwaves Generators With One Magnetron by Phase Under Matlab Simulink CodeDocument10 pagesModeling of New High Voltage Power Supply With Three-Phase Character For Microwaves Generators With One Magnetron by Phase Under Matlab Simulink CodeDebdeep MondalNo ratings yet
- Steady-State Time-Periodic Finite Element AnalysisDocument16 pagesSteady-State Time-Periodic Finite Element AnalysisJara FeyisaNo ratings yet
- Solid State CommunicationsDocument3 pagesSolid State CommunicationsTomás RojasNo ratings yet
- 0324AT Hyu PCGDocument55 pages0324AT Hyu PCGLiz BenhamouNo ratings yet
- Study of Impulse Voltage Distribution in Transformer WindingsDocument5 pagesStudy of Impulse Voltage Distribution in Transformer WindingsBhuvanes Waran100% (1)
- View 2 PDFDocument16 pagesView 2 PDFHagenPFNo ratings yet
- CMOS DelayCal Alpha PowerLawDocument11 pagesCMOS DelayCal Alpha PowerLawSANT SARANNo ratings yet
- Zhang IcemsDocument4 pagesZhang IcemskfaliNo ratings yet
- A New Validated Physically Based IGCT Model For Circuit Simulation of Snubberless and Series OperationDocument7 pagesA New Validated Physically Based IGCT Model For Circuit Simulation of Snubberless and Series Operationmipanduro7224No ratings yet
- Cigre PostprintDocument13 pagesCigre PostprintDejanNo ratings yet
- Impact of Scaling of Dielectric Thickness On Subthreshold Slope in Top-Contact Pentacene Organic Thin Film TransistorsDocument23 pagesImpact of Scaling of Dielectric Thickness On Subthreshold Slope in Top-Contact Pentacene Organic Thin Film TransistorsPriscilla ScarletNo ratings yet
- All Metal MTMDocument5 pagesAll Metal MTMneetu kumariNo ratings yet
- Neoclassical Toroidal Torque Generation by Auxiliary Heating in Non-Axisymmetric ToriDocument9 pagesNeoclassical Toroidal Torque Generation by Auxiliary Heating in Non-Axisymmetric ToriEnzo LazzaroNo ratings yet
- The Comparison of Direct and Indirect Matrix Conve-2Document5 pagesThe Comparison of Direct and Indirect Matrix Conve-2Anshuman MohantyNo ratings yet
- Analytical Calculation of The Airgap Flux Density of PM Synchronous MotorsDocument6 pagesAnalytical Calculation of The Airgap Flux Density of PM Synchronous MotorsAnchal SaxenaNo ratings yet
- 2 Goryainov 2020 J. Phys. Conf. Ser. 1697 012239Document7 pages2 Goryainov 2020 J. Phys. Conf. Ser. 1697 012239Abhishek BasakNo ratings yet
- Impact of PLL Parameters Variation On The PulsatinDocument7 pagesImpact of PLL Parameters Variation On The Pulsatine-learning HLNo ratings yet
- On The Classical Integrability of Root-T T FlowsDocument35 pagesOn The Classical Integrability of Root-T T FlowsDainXBNo ratings yet
- A Study On MOSFET Gate Driver CircuitDocument7 pagesA Study On MOSFET Gate Driver CircuitPham Viet QuanNo ratings yet
- 13IPST121Document7 pages13IPST121Anonymous 9VcxlFErfNo ratings yet
- Paper Rv5Document58 pagesPaper Rv5John Shuman0% (1)
- Energies 10 00799 v2Document14 pagesEnergies 10 00799 v2balasubramani krishnamurthiNo ratings yet
- Park TransformationDocument6 pagesPark TransformationfirdousulnazirNo ratings yet
- Modeling, Simulation and Analysis of Matrix Converter Using Matlab&SimulinkDocument5 pagesModeling, Simulation and Analysis of Matrix Converter Using Matlab&SimulinkJisha KuruvillaNo ratings yet
- Ten Part-Winding Arrangements in Sample 4-Pole Induction MotorDocument6 pagesTen Part-Winding Arrangements in Sample 4-Pole Induction MotorJunaid AhmadNo ratings yet
- 2022 A New Harmonic Current Injection Technique To Reduce Cogging Torque in Axial Flux Permanent Magnet MotorsDocument4 pages2022 A New Harmonic Current Injection Technique To Reduce Cogging Torque in Axial Flux Permanent Magnet MotorsMuhammad HumzaNo ratings yet
- Report Documentation Page: Jesse NeriDocument12 pagesReport Documentation Page: Jesse NeriMohammad MousavikNo ratings yet
- Nanotransistor A Botton UP ViewDocument8 pagesNanotransistor A Botton UP ViewDerlone AraújoNo ratings yet
- TP3 EnglishDocument2 pagesTP3 Englishammari.dz2002No ratings yet
- Ultra-Fast Perpendicular Spin-Orbit Torque MRAMDocument16 pagesUltra-Fast Perpendicular Spin-Orbit Torque MRAMKevin LiuNo ratings yet
- Analytical Modeling Thyristor-Controlled Series Capacitors For SSR StljdiesDocument9 pagesAnalytical Modeling Thyristor-Controlled Series Capacitors For SSR StljdiesKris SwaminathanNo ratings yet
- NIT 1 4 7040 Lecture 3 VLSI EC601Document51 pagesNIT 1 4 7040 Lecture 3 VLSI EC601Tanay ChakrabortyNo ratings yet
- A Quasi Equipotential Field Simulation For Preform Design of P M Superalloy DiskDocument6 pagesA Quasi Equipotential Field Simulation For Preform Design of P M Superalloy DiskBen KingNo ratings yet
- Tunnel Field-effect Transistors (TFET): Modelling and SimulationFrom EverandTunnel Field-effect Transistors (TFET): Modelling and SimulationNo ratings yet
- Chapter 10 - Toxic GasesDocument81 pagesChapter 10 - Toxic GasesĐặng Ngọc Châu VyNo ratings yet
- Experiment No: 03 Experiment Name: Rockwell Hardness Test of Different Materials. ObjectivesDocument4 pagesExperiment No: 03 Experiment Name: Rockwell Hardness Test of Different Materials. ObjectivesMir Md. Mofachel HossainNo ratings yet
- Influence of Welding Residual Stress On The Mechanical Behavior of Externally Loaded Dissimilar SS400-STS304 Steel WeldmentDocument8 pagesInfluence of Welding Residual Stress On The Mechanical Behavior of Externally Loaded Dissimilar SS400-STS304 Steel WeldmentRafi ZhaffNo ratings yet
- Essentials of Shielded Metal Arc Welding Nc1Document5 pagesEssentials of Shielded Metal Arc Welding Nc1melkie oganoNo ratings yet
- Mig Manual RX 250 & RX 400Document18 pagesMig Manual RX 250 & RX 400Madhavesh KulkarniNo ratings yet
- MATH Timber Design and Construction MethDocument6 pagesMATH Timber Design and Construction MethHades HadesNo ratings yet
- Analysis of the α, β, And γ Relaxations in PolychlorotrifluoroethyleneDocument63 pagesAnalysis of the α, β, And γ Relaxations in PolychlorotrifluoroethylenezakariiNo ratings yet
- Design of Beam Slide ShareDocument26 pagesDesign of Beam Slide ShareVRKVRK10No ratings yet
- Heise 1948Document7 pagesHeise 1948George AcostaNo ratings yet
- Physics Unit 10 NotesDocument19 pagesPhysics Unit 10 Notesp.salise352No ratings yet
- Models - Mixer.centrifugal PumpDocument22 pagesModels - Mixer.centrifugal Pumpcarlos tNo ratings yet
- DME - II Solutions I Mid Term Test 2020-21Document21 pagesDME - II Solutions I Mid Term Test 2020-21djadja nakamayaNo ratings yet
- Demystifying ESPs - A Technique To Make Your ESP Talk To You PDFDocument19 pagesDemystifying ESPs - A Technique To Make Your ESP Talk To You PDFazareiforoushNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasParmeshwar KushwahaNo ratings yet
- Establishment of Deformation and Subsidence Monitoring Baseline in The Coastal Environment - A Case Study of University of LagosDocument15 pagesEstablishment of Deformation and Subsidence Monitoring Baseline in The Coastal Environment - A Case Study of University of LagosabdulNo ratings yet
- An Overview of Recent Studies On The Analysis of Pharmaceutical PolymorphDocument27 pagesAn Overview of Recent Studies On The Analysis of Pharmaceutical Polymorphrafael_nicolay9196No ratings yet
- Dual Mode Dielectric Resonator Filters: Bachelor of Engineering (Honours)Document79 pagesDual Mode Dielectric Resonator Filters: Bachelor of Engineering (Honours)Milos Pavlovic100% (1)
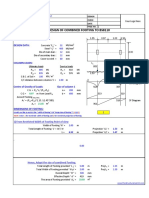
- Combined Footing DesignDocument3 pagesCombined Footing DesignThe Structural WorldNo ratings yet
- MAE 343 Intermediate Mechanics of Materials: Xingbo Liu Office: ESB 509 Phone: 293-3339 Email: Xingbo - Liu@mail - Wvu.eduDocument38 pagesMAE 343 Intermediate Mechanics of Materials: Xingbo Liu Office: ESB 509 Phone: 293-3339 Email: Xingbo - Liu@mail - Wvu.edubaig79No ratings yet
- Chemical Engineering Syllabus For GateDocument2 pagesChemical Engineering Syllabus For Gatechintz BhatNo ratings yet
- Phase Rule Water & CO2systemsDocument9 pagesPhase Rule Water & CO2systemsAtul GautamNo ratings yet
- CEC 106 Strength of Materials 2020/2021 Session Strength of MaterialsDocument7 pagesCEC 106 Strength of Materials 2020/2021 Session Strength of MaterialsAbu Muhammad AssalafiyNo ratings yet
- Typical Heat Treatment Defects of Gears and Solutions Using FEA Modeling - Thermal Processing MagazineDocument10 pagesTypical Heat Treatment Defects of Gears and Solutions Using FEA Modeling - Thermal Processing MagazineLuis Gustavo PachecoNo ratings yet
- Plane Stress LoadingDocument19 pagesPlane Stress LoadingAjeet Kumar100% (1)
- Turbine Varnish Formation - WhitepaperDocument8 pagesTurbine Varnish Formation - WhitepaperMohammadreza GalebanNo ratings yet
- Determination of Elemental Sulfur Deposition Rates For Different Natural Gas CompositionsDocument5 pagesDetermination of Elemental Sulfur Deposition Rates For Different Natural Gas CompositionsFabian de Jesus Orozco MartinezNo ratings yet
- Columns - Homework Solutions 2 PDFDocument6 pagesColumns - Homework Solutions 2 PDFChristopher GeereNo ratings yet
- Product Datasheet Isolat Enviro 1011 ProvDocument2 pagesProduct Datasheet Isolat Enviro 1011 ProvFadhli KusumaNo ratings yet
- Nelson Chemistry 12 TOCDocument7 pagesNelson Chemistry 12 TOCVictorNo ratings yet
- ECE5710 Notes03 PDFDocument79 pagesECE5710 Notes03 PDFFREDERICKNo ratings yet
























































































Download as pdf or txt
You might also like
- Physics of The Ferroelectric Nonvolatile Memory Field Effect TransistorDocument13 pagesPhysics of The Ferroelectric Nonvolatile Memory Field Effect Transistornewgeneration0% (1)
- NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slotting (Yongchao Wang, Hui Gao, Haiyang Wang etc.) (Z-Library)Document17 pagesNVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slotting (Yongchao Wang, Hui Gao, Haiyang Wang etc.) (Z-Library)zdrahalNo ratings yet
- 7 StartupDocument8 pages7 StartupasadNo ratings yet
- Model of A Diffuse Column Vacuum Arc With Cathode Jets Burning in Parallel With A High-Current Plasma ColumnDocument9 pagesModel of A Diffuse Column Vacuum Arc With Cathode Jets Burning in Parallel With A High-Current Plasma Columnahmedmagdy161992No ratings yet
- 1990 Richard Alpha Power Law Mosfet Model PDFDocument11 pages1990 Richard Alpha Power Law Mosfet Model PDFrahmanakberNo ratings yet
- PhysicsDocument30 pagesPhysicsnewgetzNo ratings yet
- Modeling and Control The Set of Matrix Converter-Two Five-Phase Wheel Motors (2 PMSM) For Driving An Electric Traction SystemDocument7 pagesModeling and Control The Set of Matrix Converter-Two Five-Phase Wheel Motors (2 PMSM) For Driving An Electric Traction SystemBENALI YOUCEF MohammedNo ratings yet
- Electrical-Model of ADITYA-U TokamakDocument8 pagesElectrical-Model of ADITYA-U TokamakRija RehmanNo ratings yet
- Electronics 09 01748Document15 pagesElectronics 09 01748ihab benayacheNo ratings yet
- Huacai2013 PDFDocument6 pagesHuacai2013 PDFIslo BenNo ratings yet
- Jurnal BNCTDocument7 pagesJurnal BNCTarnetaNo ratings yet
- A Novel Cogging Torque Simulation Method For Permanent Magnet Synchronous MachinesDocument14 pagesA Novel Cogging Torque Simulation Method For Permanent Magnet Synchronous Machinestejas9280No ratings yet
- New Analytical Model For Nanoscale Tri-Gate SOI MOSFETs Including Quantum EffectsDocument7 pagesNew Analytical Model For Nanoscale Tri-Gate SOI MOSFETs Including Quantum EffectsN.B.balamuruganNo ratings yet
- Ahmed 2020 Jpn. J. Appl. Phys. 59 106001Document10 pagesAhmed 2020 Jpn. J. Appl. Phys. 59 106001momoNo ratings yet
- KESSELL Et Al., 2009Document37 pagesKESSELL Et Al., 2009Diêgo PiresNo ratings yet
- 10th Eco-Energy and Materials Science and Engineering (EMSES2012) Voltage Control by DQ Frame Technique of SVPWM AC-DC ConverterDocument10 pages10th Eco-Energy and Materials Science and Engineering (EMSES2012) Voltage Control by DQ Frame Technique of SVPWM AC-DC ConverterJustin SitohangNo ratings yet
- VLSI V Lab N-1Document20 pagesVLSI V Lab N-1Dhiraj PrakashNo ratings yet
- Permanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMDocument8 pagesPermanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMQamilNo ratings yet
- Effects of Divertor Geometry On Tokamak Plasmas: Review ArticleDocument42 pagesEffects of Divertor Geometry On Tokamak Plasmas: Review ArticleEleomar LenaNo ratings yet
- Trapezoidal PWM Scheme For Cascaded Multilevel InverterDocument5 pagesTrapezoidal PWM Scheme For Cascaded Multilevel InverterRodovarNo ratings yet
- Mosfet Gate DriveDocument6 pagesMosfet Gate DrivegubiliNo ratings yet
- Azzouz I 2005Document6 pagesAzzouz I 2005Leonardo SicchieriNo ratings yet
- Tokamak StartupDocument8 pagesTokamak StartupasadNo ratings yet
- Grid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsDocument6 pagesGrid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsAayesha AhmedNo ratings yet
- Practical Induction 01Document5 pagesPractical Induction 01sathishNo ratings yet
- NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor SlottingDocument16 pagesNVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slottingreddy venkata krishnaNo ratings yet
- Modeling of New High Voltage Power Supply With Three-Phase Character For Microwaves Generators With One Magnetron by Phase Under Matlab Simulink CodeDocument10 pagesModeling of New High Voltage Power Supply With Three-Phase Character For Microwaves Generators With One Magnetron by Phase Under Matlab Simulink CodeDebdeep MondalNo ratings yet
- Steady-State Time-Periodic Finite Element AnalysisDocument16 pagesSteady-State Time-Periodic Finite Element AnalysisJara FeyisaNo ratings yet
- Solid State CommunicationsDocument3 pagesSolid State CommunicationsTomás RojasNo ratings yet
- 0324AT Hyu PCGDocument55 pages0324AT Hyu PCGLiz BenhamouNo ratings yet
- Study of Impulse Voltage Distribution in Transformer WindingsDocument5 pagesStudy of Impulse Voltage Distribution in Transformer WindingsBhuvanes Waran100% (1)
- View 2 PDFDocument16 pagesView 2 PDFHagenPFNo ratings yet
- CMOS DelayCal Alpha PowerLawDocument11 pagesCMOS DelayCal Alpha PowerLawSANT SARANNo ratings yet
- Zhang IcemsDocument4 pagesZhang IcemskfaliNo ratings yet
- A New Validated Physically Based IGCT Model For Circuit Simulation of Snubberless and Series OperationDocument7 pagesA New Validated Physically Based IGCT Model For Circuit Simulation of Snubberless and Series Operationmipanduro7224No ratings yet
- Cigre PostprintDocument13 pagesCigre PostprintDejanNo ratings yet
- Impact of Scaling of Dielectric Thickness On Subthreshold Slope in Top-Contact Pentacene Organic Thin Film TransistorsDocument23 pagesImpact of Scaling of Dielectric Thickness On Subthreshold Slope in Top-Contact Pentacene Organic Thin Film TransistorsPriscilla ScarletNo ratings yet
- All Metal MTMDocument5 pagesAll Metal MTMneetu kumariNo ratings yet
- Neoclassical Toroidal Torque Generation by Auxiliary Heating in Non-Axisymmetric ToriDocument9 pagesNeoclassical Toroidal Torque Generation by Auxiliary Heating in Non-Axisymmetric ToriEnzo LazzaroNo ratings yet
- The Comparison of Direct and Indirect Matrix Conve-2Document5 pagesThe Comparison of Direct and Indirect Matrix Conve-2Anshuman MohantyNo ratings yet
- Analytical Calculation of The Airgap Flux Density of PM Synchronous MotorsDocument6 pagesAnalytical Calculation of The Airgap Flux Density of PM Synchronous MotorsAnchal SaxenaNo ratings yet
- 2 Goryainov 2020 J. Phys. Conf. Ser. 1697 012239Document7 pages2 Goryainov 2020 J. Phys. Conf. Ser. 1697 012239Abhishek BasakNo ratings yet
- Impact of PLL Parameters Variation On The PulsatinDocument7 pagesImpact of PLL Parameters Variation On The Pulsatine-learning HLNo ratings yet
- On The Classical Integrability of Root-T T FlowsDocument35 pagesOn The Classical Integrability of Root-T T FlowsDainXBNo ratings yet
- A Study On MOSFET Gate Driver CircuitDocument7 pagesA Study On MOSFET Gate Driver CircuitPham Viet QuanNo ratings yet
- 13IPST121Document7 pages13IPST121Anonymous 9VcxlFErfNo ratings yet
- Paper Rv5Document58 pagesPaper Rv5John Shuman0% (1)
- Energies 10 00799 v2Document14 pagesEnergies 10 00799 v2balasubramani krishnamurthiNo ratings yet
- Park TransformationDocument6 pagesPark TransformationfirdousulnazirNo ratings yet
- Modeling, Simulation and Analysis of Matrix Converter Using Matlab&SimulinkDocument5 pagesModeling, Simulation and Analysis of Matrix Converter Using Matlab&SimulinkJisha KuruvillaNo ratings yet
- Ten Part-Winding Arrangements in Sample 4-Pole Induction MotorDocument6 pagesTen Part-Winding Arrangements in Sample 4-Pole Induction MotorJunaid AhmadNo ratings yet
- 2022 A New Harmonic Current Injection Technique To Reduce Cogging Torque in Axial Flux Permanent Magnet MotorsDocument4 pages2022 A New Harmonic Current Injection Technique To Reduce Cogging Torque in Axial Flux Permanent Magnet MotorsMuhammad HumzaNo ratings yet
- Report Documentation Page: Jesse NeriDocument12 pagesReport Documentation Page: Jesse NeriMohammad MousavikNo ratings yet
- Nanotransistor A Botton UP ViewDocument8 pagesNanotransistor A Botton UP ViewDerlone AraújoNo ratings yet
- TP3 EnglishDocument2 pagesTP3 Englishammari.dz2002No ratings yet
- Ultra-Fast Perpendicular Spin-Orbit Torque MRAMDocument16 pagesUltra-Fast Perpendicular Spin-Orbit Torque MRAMKevin LiuNo ratings yet
- Analytical Modeling Thyristor-Controlled Series Capacitors For SSR StljdiesDocument9 pagesAnalytical Modeling Thyristor-Controlled Series Capacitors For SSR StljdiesKris SwaminathanNo ratings yet
- NIT 1 4 7040 Lecture 3 VLSI EC601Document51 pagesNIT 1 4 7040 Lecture 3 VLSI EC601Tanay ChakrabortyNo ratings yet
- A Quasi Equipotential Field Simulation For Preform Design of P M Superalloy DiskDocument6 pagesA Quasi Equipotential Field Simulation For Preform Design of P M Superalloy DiskBen KingNo ratings yet
- Tunnel Field-effect Transistors (TFET): Modelling and SimulationFrom EverandTunnel Field-effect Transistors (TFET): Modelling and SimulationNo ratings yet
- Chapter 10 - Toxic GasesDocument81 pagesChapter 10 - Toxic GasesĐặng Ngọc Châu VyNo ratings yet
- Experiment No: 03 Experiment Name: Rockwell Hardness Test of Different Materials. ObjectivesDocument4 pagesExperiment No: 03 Experiment Name: Rockwell Hardness Test of Different Materials. ObjectivesMir Md. Mofachel HossainNo ratings yet
- Influence of Welding Residual Stress On The Mechanical Behavior of Externally Loaded Dissimilar SS400-STS304 Steel WeldmentDocument8 pagesInfluence of Welding Residual Stress On The Mechanical Behavior of Externally Loaded Dissimilar SS400-STS304 Steel WeldmentRafi ZhaffNo ratings yet
- Essentials of Shielded Metal Arc Welding Nc1Document5 pagesEssentials of Shielded Metal Arc Welding Nc1melkie oganoNo ratings yet
- Mig Manual RX 250 & RX 400Document18 pagesMig Manual RX 250 & RX 400Madhavesh KulkarniNo ratings yet
- MATH Timber Design and Construction MethDocument6 pagesMATH Timber Design and Construction MethHades HadesNo ratings yet
- Analysis of the α, β, And γ Relaxations in PolychlorotrifluoroethyleneDocument63 pagesAnalysis of the α, β, And γ Relaxations in PolychlorotrifluoroethylenezakariiNo ratings yet
- Design of Beam Slide ShareDocument26 pagesDesign of Beam Slide ShareVRKVRK10No ratings yet
- Heise 1948Document7 pagesHeise 1948George AcostaNo ratings yet
- Physics Unit 10 NotesDocument19 pagesPhysics Unit 10 Notesp.salise352No ratings yet
- Models - Mixer.centrifugal PumpDocument22 pagesModels - Mixer.centrifugal Pumpcarlos tNo ratings yet
- DME - II Solutions I Mid Term Test 2020-21Document21 pagesDME - II Solutions I Mid Term Test 2020-21djadja nakamayaNo ratings yet
- Demystifying ESPs - A Technique To Make Your ESP Talk To You PDFDocument19 pagesDemystifying ESPs - A Technique To Make Your ESP Talk To You PDFazareiforoushNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasParmeshwar KushwahaNo ratings yet
- Establishment of Deformation and Subsidence Monitoring Baseline in The Coastal Environment - A Case Study of University of LagosDocument15 pagesEstablishment of Deformation and Subsidence Monitoring Baseline in The Coastal Environment - A Case Study of University of LagosabdulNo ratings yet
- An Overview of Recent Studies On The Analysis of Pharmaceutical PolymorphDocument27 pagesAn Overview of Recent Studies On The Analysis of Pharmaceutical Polymorphrafael_nicolay9196No ratings yet
- Dual Mode Dielectric Resonator Filters: Bachelor of Engineering (Honours)Document79 pagesDual Mode Dielectric Resonator Filters: Bachelor of Engineering (Honours)Milos Pavlovic100% (1)
- Combined Footing DesignDocument3 pagesCombined Footing DesignThe Structural WorldNo ratings yet
- MAE 343 Intermediate Mechanics of Materials: Xingbo Liu Office: ESB 509 Phone: 293-3339 Email: Xingbo - Liu@mail - Wvu.eduDocument38 pagesMAE 343 Intermediate Mechanics of Materials: Xingbo Liu Office: ESB 509 Phone: 293-3339 Email: Xingbo - Liu@mail - Wvu.edubaig79No ratings yet
- Chemical Engineering Syllabus For GateDocument2 pagesChemical Engineering Syllabus For Gatechintz BhatNo ratings yet
- Phase Rule Water & CO2systemsDocument9 pagesPhase Rule Water & CO2systemsAtul GautamNo ratings yet
- CEC 106 Strength of Materials 2020/2021 Session Strength of MaterialsDocument7 pagesCEC 106 Strength of Materials 2020/2021 Session Strength of MaterialsAbu Muhammad AssalafiyNo ratings yet
- Typical Heat Treatment Defects of Gears and Solutions Using FEA Modeling - Thermal Processing MagazineDocument10 pagesTypical Heat Treatment Defects of Gears and Solutions Using FEA Modeling - Thermal Processing MagazineLuis Gustavo PachecoNo ratings yet
- Plane Stress LoadingDocument19 pagesPlane Stress LoadingAjeet Kumar100% (1)
- Turbine Varnish Formation - WhitepaperDocument8 pagesTurbine Varnish Formation - WhitepaperMohammadreza GalebanNo ratings yet
- Determination of Elemental Sulfur Deposition Rates For Different Natural Gas CompositionsDocument5 pagesDetermination of Elemental Sulfur Deposition Rates For Different Natural Gas CompositionsFabian de Jesus Orozco MartinezNo ratings yet
- Columns - Homework Solutions 2 PDFDocument6 pagesColumns - Homework Solutions 2 PDFChristopher GeereNo ratings yet
- Product Datasheet Isolat Enviro 1011 ProvDocument2 pagesProduct Datasheet Isolat Enviro 1011 ProvFadhli KusumaNo ratings yet
- Nelson Chemistry 12 TOCDocument7 pagesNelson Chemistry 12 TOCVictorNo ratings yet
- ECE5710 Notes03 PDFDocument79 pagesECE5710 Notes03 PDFFREDERICKNo ratings yet