Download as pdf or txt
You might also like
- Reversed CurvesDocument7 pagesReversed CurvesMarc Dared Cagaoan67% (9)
- DOM E-Note 28062016 064212AM PDFDocument225 pagesDOM E-Note 28062016 064212AM PDFBaran Shafqat100% (1)
- Dom Tut SheetDocument3 pagesDom Tut SheetYateesh GuptaNo ratings yet
- OmniGear Tech Info BinderDocument86 pagesOmniGear Tech Info BinderMiguel Matias ReineroNo ratings yet
- DOM2Document30 pagesDOM2JamesNo ratings yet
- Rotating Mass Balance HassanDocument60 pagesRotating Mass Balance HassanDanialNo ratings yet
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Lesson 1 Balancing of Rotating MassesDocument14 pagesLesson 1 Balancing of Rotating MassesNjabulo NgobeseNo ratings yet
- Balancing NotesDocument63 pagesBalancing NotesMithashree MNo ratings yet
- Tom 8Document7 pagesTom 8Om TandelNo ratings yet
- Unit-4 1Document21 pagesUnit-4 1Shashank ANo ratings yet
- Unit II Balancingofrotatingmasses 210207040000Document23 pagesUnit II Balancingofrotatingmasses 210207040000ShanmuganathanNo ratings yet
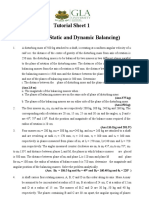
- Tutorial Sheet 1Document3 pagesTutorial Sheet 1Shashank SrivastavaNo ratings yet
- Balancing - Rotating MassesDocument25 pagesBalancing - Rotating MassesEngineering DesignNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedHizbullah SattiNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM Repairedlulu adityaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedSrinivas BalivadaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedSrinivas BalivadaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedRuchindra KumarNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedMohammad Ishfaq BhatNo ratings yet
- Balancing - 1Document65 pagesBalancing - 1UTKARSH MISHRANo ratings yet
- Balancing of Rotating MassesDocument17 pagesBalancing of Rotating MassesEr Sumit SarkalanNo ratings yet
- Balancing of Rotating Masses (DDT)Document3 pagesBalancing of Rotating Masses (DDT)Sunny BhatiaNo ratings yet
- Assignment No 5 - EMEC208L - BalancingDocument1 pageAssignment No 5 - EMEC208L - Balancinge22mecu0009No ratings yet
- DOM Assignments 28062016 064421AM PDFDocument18 pagesDOM Assignments 28062016 064421AM PDFPatel Brijesh MahendrabhaiNo ratings yet
- DOM QP ScribdDocument5 pagesDOM QP ScribdvsanthanamNo ratings yet
- Choose The Correct Answer From A, B, or CDocument3 pagesChoose The Correct Answer From A, B, or CInsideBest10No ratings yet
- CHP 29Document13 pagesCHP 29Abhiram Reddy100% (1)
- Dynamics of Machines UNIT-02 Part-ADocument2 pagesDynamics of Machines UNIT-02 Part-ASakthivel KarunakaranNo ratings yet
- Dom Qbank IIIDocument5 pagesDom Qbank IIISabareeswaran MurugesanNo ratings yet
- Assignment-7 (Balancing)Document1 pageAssignment-7 (Balancing)Mohd Javed IqbalNo ratings yet
- Dynamics Unit II AssignmentDocument2 pagesDynamics Unit II Assignmentkannanviknesh086319No ratings yet
- Balancing of Rotating MassesDocument13 pagesBalancing of Rotating MassesAjwad HaziqNo ratings yet
- Sme1206-2 0Document25 pagesSme1206-2 0Anantha ReddyNo ratings yet
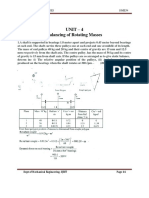
- Unit - 4 Balancing of Rotating Masses: A C T Ss Fe Spe T Vely Ce y S - , e e (I I GsDocument8 pagesUnit - 4 Balancing of Rotating Masses: A C T Ss Fe Spe T Vely Ce y S - , e e (I I GsKong DuiDuiNo ratings yet
- Static & Dynamic BalancingDocument5 pagesStatic & Dynamic BalancingSchöberl ErichNo ratings yet
- Balancing 2.3 PDFDocument12 pagesBalancing 2.3 PDFshibuhceNo ratings yet
- Assignment 2Document4 pagesAssignment 2Durai SivamNo ratings yet
- 3 Balancing Rotaring Masses Rev1allDocument27 pages3 Balancing Rotaring Masses Rev1allDR. SIR CV. RAMANNo ratings yet
- Balancing - Rotating MassesDocument26 pagesBalancing - Rotating MassesEngineering DesignNo ratings yet
- 6 BalancingDocument3 pages6 BalancingAnonymous mXicTi8hBNo ratings yet
- ICSE X FORCE REMEDIAL REVISION-mergedDocument8 pagesICSE X FORCE REMEDIAL REVISION-mergedanimeshtechnosNo ratings yet
- Week Slides Theory of MachineDocument44 pagesWeek Slides Theory of MachineAhmad AbdNo ratings yet
- Balancing Theory of M/C PDFDocument6 pagesBalancing Theory of M/C PDFSandip GhoshNo ratings yet
- MEE 312 Lecture Note-1Document30 pagesMEE 312 Lecture Note-1horliverquinn01No ratings yet
- Numerical Sheet 7Document3 pagesNumerical Sheet 7Nishant MayekarNo ratings yet
- Lecture - 1 Balancing of Masses Theory of MachineDocument47 pagesLecture - 1 Balancing of Masses Theory of MachineabasNo ratings yet
- Universiti Tun Hussein Onn MalaysiaDocument46 pagesUniversiti Tun Hussein Onn MalaysiahamryNo ratings yet
- Theory of Machine: BalancingDocument51 pagesTheory of Machine: Balancingnishant dhimanNo ratings yet
- Balancing 121212095610 Phpapp02Document59 pagesBalancing 121212095610 Phpapp02Harith TsaqifNo ratings yet
- Unit - V BalancingDocument9 pagesUnit - V BalancingdoomraNo ratings yet
- Unit Ii Balancing Part ADocument15 pagesUnit Ii Balancing Part AsureshkumarNo ratings yet
- Lect BalancingDocument72 pagesLect BalancingTalha KhanzadaNo ratings yet
- 19ME5603 DOM Unit II QuestionsDocument3 pages19ME5603 DOM Unit II QuestionsRobinston Jeyasingh KNo ratings yet
- Mechanics-Probs5 2017Document3 pagesMechanics-Probs5 2017Diego ForeroNo ratings yet
- Module-4 - Balancing of Rotating MassesDocument46 pagesModule-4 - Balancing of Rotating MassesNIKHIL ASNo ratings yet
- DOM Question Bank Unit 1 &2 (1) - 1Document5 pagesDOM Question Bank Unit 1 &2 (1) - 1SMHD19 NIKHIL NARKHEDENo ratings yet
- Mechanicsfinalreport 120725010809 Phpapp02Document16 pagesMechanicsfinalreport 120725010809 Phpapp02Harith TsaqifNo ratings yet
- TOPIC 1. Balancint of Rotating MassesDocument17 pagesTOPIC 1. Balancint of Rotating MassesOrbital TechNo ratings yet
- Classical 093Document33 pagesClassical 093Julian David Henao EscobarNo ratings yet
- TrigonometryDocument31 pagesTrigonometryHamza Javed100% (1)
- Physics Report - Reflection and DispersionDocument2 pagesPhysics Report - Reflection and DispersionMartine Gjermundsen RæstadNo ratings yet
- 3D GeometryDocument13 pages3D GeometryRoshan RajNo ratings yet
- Final Assignment & Solution: MEC 231 Basic Mechanics IDocument39 pagesFinal Assignment & Solution: MEC 231 Basic Mechanics IAbu ShayedNo ratings yet
- Chapter 5Document56 pagesChapter 5hmdniltfiNo ratings yet
- OmniGear - Tech .Info .Binder.v2Document86 pagesOmniGear - Tech .Info .Binder.v2Ufuk KılıçNo ratings yet
- 02 Parallel-Lines-Angles Practice With AnswersDocument5 pages02 Parallel-Lines-Angles Practice With AnswersvkumarNo ratings yet
- The Shape of The Cone of The Twist Drills Unit-2Document5 pagesThe Shape of The Cone of The Twist Drills Unit-2Akesh KakarlaNo ratings yet
- Tangent GalvanometerDocument3 pagesTangent GalvanometerSoodamany Ponnu PandianNo ratings yet
- M2 All Solomon PapersDocument26 pagesM2 All Solomon Papersprofitmaker_2No ratings yet
- Bebop AutonomyDocument33 pagesBebop AutonomybiduleNo ratings yet
- WebMO Users GuideDocument108 pagesWebMO Users GuiderubeniguesouzaNo ratings yet
- Assignment 2 Vel and Accln PDFDocument2 pagesAssignment 2 Vel and Accln PDFSarvesh ArbattiNo ratings yet
- Mathematics Grade 11 Revision Term 1 - 2023Document16 pagesMathematics Grade 11 Revision Term 1 - 2023ora mashaNo ratings yet
- Maths - Year 8 (Reflection and Rotation)Document19 pagesMaths - Year 8 (Reflection and Rotation)Just a BystanderNo ratings yet
- 4th Grade Math Grab Pack 1Document11 pages4th Grade Math Grab Pack 1M PatelNo ratings yet
- Basics of Dimension IngDocument11 pagesBasics of Dimension IngChandra RaoNo ratings yet
- 2D Transformations: 3.1 TransformationDocument29 pages2D Transformations: 3.1 TransformationRokey AhmedNo ratings yet
- Geometric Figure and Measurement - Lesson - 3Document15 pagesGeometric Figure and Measurement - Lesson - 3samsonNo ratings yet
- Original PDF A Problem Solving Approach To Mathematics For Elementary School Teachers 12th Edition PDFDocument42 pagesOriginal PDF A Problem Solving Approach To Mathematics For Elementary School Teachers 12th Edition PDFalice.bueckers152100% (38)
- Pil Unit Review2015 KeyDocument6 pagesPil Unit Review2015 Keyapi-296347043No ratings yet
- Fike Co2 SystemDocument28 pagesFike Co2 Systemomarrgb97No ratings yet
- Mid - Term Guide: 1. Trigonometric Ratios, Sine and Cosine RulesDocument9 pagesMid - Term Guide: 1. Trigonometric Ratios, Sine and Cosine RuleschesNo ratings yet
- Addition of Vector: Steps To Add Vectors by Head To Tail RuleDocument8 pagesAddition of Vector: Steps To Add Vectors by Head To Tail RuleMuhammad HammadNo ratings yet
- Long-Term Planning Template 2: Cambridge Lower Secondary Mathematics Stage 7Document5 pagesLong-Term Planning Template 2: Cambridge Lower Secondary Mathematics Stage 7Sumant Sumant100% (1)
- Physics Experiment 1Document2 pagesPhysics Experiment 1Debraj SarkarNo ratings yet
- Diaz MathlpDocument4 pagesDiaz MathlpKONICA GAY DURANGO VILLAHERMOSANo ratings yet
- Trigonometric FormulaeDocument6 pagesTrigonometric FormulaeholaNo ratings yet