Download as pdf or txt
You might also like
- Preboard Final November 2021Document15 pagesPreboard Final November 2021Francis Verbo100% (3)
- Criterios de Aceptacion PT SiintegDocument10 pagesCriterios de Aceptacion PT SiintegManuel Andres Mantilla DuranNo ratings yet
- SOP For Internal Rotating Inspection SystemDocument11 pagesSOP For Internal Rotating Inspection SystemIkhsan DalimuntheNo ratings yet
- Afd-Lect9a Chap2-Related Notes PDFDocument16 pagesAfd-Lect9a Chap2-Related Notes PDFzcap excelNo ratings yet
- Chap 23Document5 pagesChap 23apratim.chatterjiNo ratings yet
- Chap 1Document7 pagesChap 1apratim.chatterjiNo ratings yet
- Day 03Document7 pagesDay 03احمد الدلالNo ratings yet
- Small Amplitude Theory 4Document18 pagesSmall Amplitude Theory 4mtarequeali5836No ratings yet
- Euler and Navier-StokesDocument11 pagesEuler and Navier-StokesşeydaNo ratings yet
- Chap 10Document5 pagesChap 10apratim.chatterjiNo ratings yet
- Kuli Stokes NavierDocument6 pagesKuli Stokes NavierZeitnutzungNo ratings yet
- 6.lec2 2Document11 pages6.lec2 2Shahzaib Anwar OffNo ratings yet
- Boundary LayerDocument9 pagesBoundary LayerBenNo ratings yet
- FenTrans Parte3Document11 pagesFenTrans Parte3papaboboheNo ratings yet
- Chap 5Document5 pagesChap 5apratim.chatterjiNo ratings yet
- Section 3 NotesDocument37 pagesSection 3 NotesRbe Batu HanNo ratings yet
- Flow Between Parallel Plates - Comsol2008Document22 pagesFlow Between Parallel Plates - Comsol2008Lakshmi BarathiNo ratings yet
- Fluid Lectures, Unit 3Document28 pagesFluid Lectures, Unit 3nadher albaghdadiNo ratings yet
- Lecture4 9)Document31 pagesLecture4 9)entesar kareemNo ratings yet
- External FlowDocument27 pagesExternal Flowraghu.entrepreneurNo ratings yet
- OutputDocument81 pagesOutputSouhardya BanerjeeNo ratings yet
- Vena Contracta: Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544Document6 pagesVena Contracta: Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544aiur111No ratings yet
- Chapter 2: Turbulent Flow in Pipes Characteristics of Turbulent Flow in PipesDocument27 pagesChapter 2: Turbulent Flow in Pipes Characteristics of Turbulent Flow in PipesNigel Joseph KabigtingNo ratings yet
- Part 7 Flow Flow in A Boundary LayerDocument7 pagesPart 7 Flow Flow in A Boundary LayerDaniel RotariNo ratings yet
- Day 14Document10 pagesDay 14احمد الدلالNo ratings yet
- Diseño de TuberiasDocument33 pagesDiseño de TuberiasCristina100% (1)
- Lecture 7Document12 pagesLecture 7kibwanajuma4956No ratings yet
- Nithin K Rajendran July-NovemberDocument5 pagesNithin K Rajendran July-NovembernithinNo ratings yet
- Navier Stokes EquationsDocument17 pagesNavier Stokes EquationsAlice LewisNo ratings yet
- TCN2122 Topic 2Document20 pagesTCN2122 Topic 2Usman SuhaimyNo ratings yet
- Hapter 2:-: Potential FlowDocument19 pagesHapter 2:-: Potential FlowAhmed YassenNo ratings yet
- 06.0 PP 30 59 Single-Particle MotionDocument30 pages06.0 PP 30 59 Single-Particle MotionmhumbertNo ratings yet
- Chap 22Document6 pagesChap 22apratim.chatterjiNo ratings yet
- Potential Flow TheoryDocument11 pagesPotential Flow TheoryGohar KhokharNo ratings yet
- CH6 Chapter 6 Fluid Dynamics 99Document15 pagesCH6 Chapter 6 Fluid Dynamics 99Ameer SulthanNo ratings yet
- Chapter 1 GeneralitiesDocument24 pagesChapter 1 GeneralitiesPuwa CalvinNo ratings yet
- 9961 N 23121Document2 pages9961 N 23121fazeelm24No ratings yet
- Surface WavesDocument27 pagesSurface WavesCarlinhos Queda D'águaNo ratings yet
- Fluids 2022 Fluids-BasicsDocument16 pagesFluids 2022 Fluids-Basics16 Malola KrishnanNo ratings yet
- Artificial Viscosity HansteenDocument10 pagesArtificial Viscosity HansteenChandan Kumar SidhantNo ratings yet
- 307 Part 01 2021-22Document65 pages307 Part 01 2021-22Yeaomun TousifNo ratings yet
- Fluid Flow TheoryDocument257 pagesFluid Flow TheoryGeorge OparNo ratings yet
- NS EquationDocument80 pagesNS EquationYash JainNo ratings yet
- Gandhinagar Institute of Technology: Subject:-Fluid MechanicsDocument30 pagesGandhinagar Institute of Technology: Subject:-Fluid MechanicsdevNo ratings yet
- FlnotesDocument165 pagesFlnotesRodrigo GarcíaNo ratings yet
- Chapter 2 Energy ProinciplesDocument18 pagesChapter 2 Energy ProinciplesRefisa JiruNo ratings yet
- Modelling Turbulent Flow (1) : - Why Not Solve The Navier-Stokes Equations?Document18 pagesModelling Turbulent Flow (1) : - Why Not Solve The Navier-Stokes Equations?havaNo ratings yet
- Sec1 3-8Document6 pagesSec1 3-8UMANGNo ratings yet
- Forced Convection: Reynolds Analogy and Dimensional AnalysisDocument2 pagesForced Convection: Reynolds Analogy and Dimensional AnalysisMushtansir AnsariNo ratings yet
- Boundary Layers: Chaps. 3 4Document25 pagesBoundary Layers: Chaps. 3 4geo angNo ratings yet
- Assessment of Slam Induced Loads On Two Dimensional Wedges and Ship SectionsDocument10 pagesAssessment of Slam Induced Loads On Two Dimensional Wedges and Ship SectionsMarcelo De Oliveira PredesNo ratings yet
- Chapter One Two Dimensional Potential Flows Theory: 1.1. Definition of Potential FlowDocument17 pagesChapter One Two Dimensional Potential Flows Theory: 1.1. Definition of Potential FlownunuNo ratings yet
- Résumé BiblioDocument10 pagesRésumé Bibliolouis gauvainNo ratings yet
- PX264 NotesDocument27 pagesPX264 NotesSun NoahNo ratings yet
- Irrotational Flows: Dr. Gergely Kristóf Department of Fluid Mechanics, BME February, 2017Document17 pagesIrrotational Flows: Dr. Gergely Kristóf Department of Fluid Mechanics, BME February, 2017dhandaNo ratings yet
- Sec 1Document11 pagesSec 1lee geeNo ratings yet
- Feeg2003 L21Document9 pagesFeeg2003 L21jiales225No ratings yet
- ME 563 - Intermediate Fluid Dynamics - Su Lecture 6 - Basic Viscous Flow IdeasDocument4 pagesME 563 - Intermediate Fluid Dynamics - Su Lecture 6 - Basic Viscous Flow Ideaszcap excelNo ratings yet
- Solución Parcial Mecánica de FluidosDocument5 pagesSolución Parcial Mecánica de FluidosIñigoNo ratings yet
- Viscosity PDFDocument10 pagesViscosity PDFعلي مؤيد مطشر صدامNo ratings yet
- Kinetic Energy in Laminar Pipe FlowDocument4 pagesKinetic Energy in Laminar Pipe FlowCamille CrnNo ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Chap 1Document7 pagesChap 1apratim.chatterjiNo ratings yet
- Chap 14Document6 pagesChap 14apratim.chatterjiNo ratings yet
- Chap 15Document7 pagesChap 15apratim.chatterjiNo ratings yet
- Chap 23Document5 pagesChap 23apratim.chatterjiNo ratings yet
- Chap 19Document6 pagesChap 19apratim.chatterjiNo ratings yet
- Broederz ExtrusionDocument12 pagesBroederz Extrusionapratim.chatterjiNo ratings yet
- Time ResoldDocument14 pagesTime ResoldJONATAN RODRIGUEZ BAQUERIZONo ratings yet
- SeparatorDocument55 pagesSeparatorOsama HassanNo ratings yet
- Critical Resolved Shear StressDocument31 pagesCritical Resolved Shear StressLumamba ChiyabiNo ratings yet
- Cox Instruments Flow StraightenersDocument8 pagesCox Instruments Flow StraightenersYasmine ياسمينNo ratings yet
- Rotary EvaporatorDocument3 pagesRotary EvaporatorJushiNo ratings yet
- 5 Metfloor Installation GuideDocument9 pages5 Metfloor Installation GuideTùng Hì100% (1)
- Kinetics of Clay DehydrationDocument10 pagesKinetics of Clay DehydrationAnnastacia PrissyliaNo ratings yet
- PRESTRESSED CONCRETE 03 Rev00Document4 pagesPRESTRESSED CONCRETE 03 Rev00Hussein MuslihNo ratings yet
- Solvent Properties of DMSODocument2 pagesSolvent Properties of DMSOSunny YangNo ratings yet
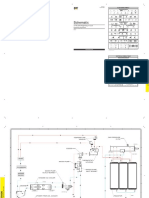
- Scematic Cooling 777E KYDDocument2 pagesScematic Cooling 777E KYDAgung WicaksonoNo ratings yet
- Solution: Conservation of EnergyDocument8 pagesSolution: Conservation of Energydist2235No ratings yet
- Statistical Mechanics - Homework Assignment 4: Alejandro G Omez Espinosa March 24, 2013Document3 pagesStatistical Mechanics - Homework Assignment 4: Alejandro G Omez Espinosa March 24, 2013Ale Gomez0% (1)
- TocDocument8 pagesTocdikiNo ratings yet
- May 21 U5 MSDocument20 pagesMay 21 U5 MSemdyoverdriveNo ratings yet
- Static Analysis - Step by StepDocument3 pagesStatic Analysis - Step by StepJitendra ItankarNo ratings yet
- 17.1 (B) Equilibrium LawDocument7 pages17.1 (B) Equilibrium LawKshiraj PanchalNo ratings yet
- Melc-Based Science DLL Quarter 1 Week 4Document4 pagesMelc-Based Science DLL Quarter 1 Week 4Czarina DalunagNo ratings yet
- Elements SeismologyDocument18 pagesElements SeismologyReniel SalesNo ratings yet
- What Is New & Changed in STAAD - ProDocument52 pagesWhat Is New & Changed in STAAD - Proanon_441948462No ratings yet
- Alcorcon Engineering Review Center: Power & Industrial Plant EngineeringDocument13 pagesAlcorcon Engineering Review Center: Power & Industrial Plant EngineeringNeil SequioNo ratings yet
- Current ElectricityDocument70 pagesCurrent ElectricitycodeNo ratings yet
- PC1431 MasteringPhysics Assignment 3Document14 pagesPC1431 MasteringPhysics Assignment 3stpmoment0% (2)
- CH 111-2-2023Document71 pagesCH 111-2-2023mirnadeem2021No ratings yet
- LSD400XXDocument9 pagesLSD400XXDavid_MacielNo ratings yet
- Mechanisms Final ReportDocument44 pagesMechanisms Final ReportOmar SaleemNo ratings yet
- Numerical Analysis of Surface Subsidence in Asymmetric Parallel Highway TunnelsDocument11 pagesNumerical Analysis of Surface Subsidence in Asymmetric Parallel Highway TunnelsEngr. Zahid Ur RehmanNo ratings yet
- ZF Transmission ZF s6 650 - 6s 750 Troubleshooting Guide PDFDocument34 pagesZF Transmission ZF s6 650 - 6s 750 Troubleshooting Guide PDFBrenda Arnold100% (1)