Download as pdf or txt
You might also like
- Experiment 1 Digital Forensics: Name: Kuldeep Singh Reg. No.: 17BCE0086 Slot: L31+L32Document3 pagesExperiment 1 Digital Forensics: Name: Kuldeep Singh Reg. No.: 17BCE0086 Slot: L31+L32Nidhi RathiNo ratings yet
- Connector Datasheet - JK03M & JK03M2 Connector Datasheet - ENDocument2 pagesConnector Datasheet - JK03M & JK03M2 Connector Datasheet - ENDiogoNo ratings yet
- The Belt Conveyor: A Concise Basic CourseDocument58 pagesThe Belt Conveyor: A Concise Basic Courseiman zareie0% (1)
- Automation and Control Systems: Dr. Issam ELGMATIDocument40 pagesAutomation and Control Systems: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
- Chapter 1 Introduction W2015Document42 pagesChapter 1 Introduction W2015120200421003nNo ratings yet
- Unit I Introduction To Mechatronics R&a 2023Document103 pagesUnit I Introduction To Mechatronics R&a 2023kesofi4046No ratings yet
- Control Systems1Document19 pagesControl Systems1Mohammad Gulam AhamadNo ratings yet
- Automotive Control Systems - NJT-1Document67 pagesAutomotive Control Systems - NJT-1ranaparth4050No ratings yet
- Lecture 01 1Document27 pagesLecture 01 1sarmed ahmedNo ratings yet
- 1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemDocument33 pages1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemAzhar AliNo ratings yet
- Lesson 1-3Document48 pagesLesson 1-3T ENGANo ratings yet
- Lec 01 BcsDocument27 pagesLec 01 Bcsapi-247714257No ratings yet
- Part 1 IntroductionDocument42 pagesPart 1 Introductionandrew brownNo ratings yet
- 351 - 27435 - EE418 - 2016 - 1 - 2 - 1 - 0 1 Lec1 EE418 IntroductionDocument38 pages351 - 27435 - EE418 - 2016 - 1 - 2 - 1 - 0 1 Lec1 EE418 IntroductionEljameely JamaleldeenNo ratings yet
- Week1 KendaliDocument71 pagesWeek1 KendaliChairul FirmansyahNo ratings yet
- Control Systems PPT 1Document27 pagesControl Systems PPT 1sad soulNo ratings yet
- Automatic Control SystemsDocument36 pagesAutomatic Control SystemsDoru TărcăuNo ratings yet
- 001 Feedback and CONTROL SYSTEMS - NotesDocument10 pages001 Feedback and CONTROL SYSTEMS - NotesJeremiahNo ratings yet
- Chap 1Document14 pagesChap 1Siraj MohammedNo ratings yet
- UNIT - 01 Introduction and Mathematical Modeling To Control SystemsDocument68 pagesUNIT - 01 Introduction and Mathematical Modeling To Control SystemsMD SHAHRIARMAHMUDNo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- Topic 1. Introduction To Control Systems DesignDocument14 pagesTopic 1. Introduction To Control Systems DesignxREDCivicCometxNo ratings yet
- Lecture 1 IntroductionDocument29 pagesLecture 1 IntroductionMohanad Al-RekanyNo ratings yet
- Lecture # 01 (EL-305) - DR - TariqDocument28 pagesLecture # 01 (EL-305) - DR - TariqFawad HassanNo ratings yet
- Unit IDocument42 pagesUnit Irajavelan.mNo ratings yet
- L1 - Introduction To ControlDocument26 pagesL1 - Introduction To ControlAbdullahi Zubairu SokombaNo ratings yet
- C4: Control TerminologiesDocument72 pagesC4: Control TerminologiesOladokun Sulaiman OlanrewajuNo ratings yet
- Lecture 1 Introduction 01 1Document30 pagesLecture 1 Introduction 01 1Charles CalibreNo ratings yet
- Control Systems1Document19 pagesControl Systems1Mohammad Gulam AhamadNo ratings yet
- Ase327unit 5Document50 pagesAse327unit 5GAURAV RATHORENo ratings yet
- Aerospace Control Systems 2020Document64 pagesAerospace Control Systems 2020Angeline ChasakaraNo ratings yet
- Lecture 01 Overview of Control SystemsDocument32 pagesLecture 01 Overview of Control Systemscesar ruizNo ratings yet
- Class FourDocument52 pagesClass FourTemari futureNo ratings yet
- Learning Unit 03: Control SystemsDocument11 pagesLearning Unit 03: Control SystemsFuji smbeTNo ratings yet
- Chapter 1 - v1sDocument31 pagesChapter 1 - v1sKiet Kuat KongNo ratings yet
- FeedbackDocument43 pagesFeedbackJanmarc CorpuzNo ratings yet
- 002 PDFDocument9 pages002 PDFTrisha SARMIENTONo ratings yet
- CE - Lec 1Document29 pagesCE - Lec 1Sumran ShahidNo ratings yet
- NMB34203 ch1 IntroDocument38 pagesNMB34203 ch1 IntrofatinNo ratings yet
- Control SystemDocument110 pagesControl SystemAkshat MehrotraNo ratings yet
- Ontrol Ngineering: NtroductionDocument31 pagesOntrol Ngineering: NtroductionShz AwanNo ratings yet
- Chapter OneDocument21 pagesChapter OnetimketaNo ratings yet
- Regulations and Control Engineering (Meng 4162) : Chapter - 1 Introduction To Control SystemsDocument30 pagesRegulations and Control Engineering (Meng 4162) : Chapter - 1 Introduction To Control SystemsYared brhaneNo ratings yet
- Unit 1 Control SystemDocument86 pagesUnit 1 Control SystemVijay Ct67% (3)
- Introduction To Control Systems - Part 2Document9 pagesIntroduction To Control Systems - Part 2Trisha SARMIENTONo ratings yet
- DrSsim 2761 16069 2 Lecture1-IntroductionDocument38 pagesDrSsim 2761 16069 2 Lecture1-IntroductionZeeshan RafiqNo ratings yet
- Control MidDocument310 pagesControl MidRIZER l رايزرNo ratings yet
- 1 IntroductionDocument29 pages1 IntroductionMüge ERDOĞANNo ratings yet
- Introduction To Control System: By: Mohd RedzuwanDocument41 pagesIntroduction To Control System: By: Mohd RedzuwanShalida SharifNo ratings yet
- Introduction To Control Systems: Ece-FcsDocument71 pagesIntroduction To Control Systems: Ece-FcsBUENAOBRA VASHNo ratings yet
- 1 Introduction To Control SystemsDocument47 pages1 Introduction To Control Systemsokay45486No ratings yet
- Control Systems: Dr. Malaya Kumar Hota (Prof.), SENSE, VIT UniversityDocument23 pagesControl Systems: Dr. Malaya Kumar Hota (Prof.), SENSE, VIT Universityshrey saxenaNo ratings yet
- 1 Intro To Feedcon - 1 - STUDDocument34 pages1 Intro To Feedcon - 1 - STUDAngelo AralarNo ratings yet
- Chapter 1,2,3Document28 pagesChapter 1,2,3mesfin snowNo ratings yet
- Closed LoopDocument19 pagesClosed Loopammar120100% (1)
- Control Systems Lecture-1 2018Document60 pagesControl Systems Lecture-1 2018Lloyd MunthaliNo ratings yet
- Control System PresentationDocument15 pagesControl System PresentationecegianNo ratings yet
- LECTURE 1. Control Systems Engineering - MEB 4101-1Document44 pagesLECTURE 1. Control Systems Engineering - MEB 4101-1nickokinyunyu11No ratings yet
- Control SystemDocument49 pagesControl SystemYashwant ChaudharyNo ratings yet
- Introduction To Control Engineering and System Modeling (1) : Majid Midhat SaeedDocument7 pagesIntroduction To Control Engineering and System Modeling (1) : Majid Midhat Saeedماجد مدحت سعيدNo ratings yet
- Control SystemsDocument10 pagesControl Systemsilker.ozcelikkanNo ratings yet
- Dissolved Gas Analyser DGADocument32 pagesDissolved Gas Analyser DGAVaibhav GargNo ratings yet
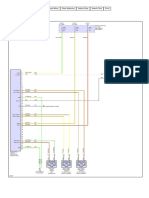
- Toggle Select Wire Mode Hide All Non Selected Wires Clear Selection Select Color Search Text PrintDocument2 pagesToggle Select Wire Mode Hide All Non Selected Wires Clear Selection Select Color Search Text PrintFelix VelasquezNo ratings yet
- SSA AUS Safesmart Tunnelling Brochure INTERACTIVEDocument21 pagesSSA AUS Safesmart Tunnelling Brochure INTERACTIVEnotengofffNo ratings yet
- Full Name in English Bank Name Ifsccode Account NumberDocument7 pagesFull Name in English Bank Name Ifsccode Account NumberVarun MarwahaNo ratings yet
- Special Topic ESA QP - Programming With C++ (UE19CS208B)Document4 pagesSpecial Topic ESA QP - Programming With C++ (UE19CS208B)luciferNo ratings yet
- MARK4210 Class 5 Situation Analysis CompleteDocument27 pagesMARK4210 Class 5 Situation Analysis CompleteCandy ChoNo ratings yet
- CALPUFF Version6 UserInstructionsDocument873 pagesCALPUFF Version6 UserInstructionsarkeiosNo ratings yet
- Data Scientist Resume SampleDocument8 pagesData Scientist Resume Sampleafmrdrpsbbxuag100% (1)
- Review of Wellsharp Test Question: Instructor Submitting The RequestDocument2 pagesReview of Wellsharp Test Question: Instructor Submitting The RequestBarbare RenNo ratings yet
- 10 Ways BIM Can Help You Save Time During Design PhaseDocument2 pages10 Ways BIM Can Help You Save Time During Design PhaseJuan AlayoNo ratings yet
- Pre-Reading 03 - Propel Training DeckDocument89 pagesPre-Reading 03 - Propel Training DeckAMANPREET SINGHNo ratings yet
- Assignment 4 Wida Widiawati 19AKJ 194020034Document6 pagesAssignment 4 Wida Widiawati 19AKJ 194020034wida widiawatiNo ratings yet
- DIDM NGIS PresentationDocument53 pagesDIDM NGIS PresentationJan HuesNo ratings yet
- Practice Problems M201Document13 pagesPractice Problems M201dsreNo ratings yet
- TE IT Week2 FCSDF L4-L6Document40 pagesTE IT Week2 FCSDF L4-L6Saquibh ShaikhNo ratings yet
- OTDR Report: Total Fiber InformationDocument1 pageOTDR Report: Total Fiber InformationFrancisco FloresNo ratings yet
- Networking DevicesDocument22 pagesNetworking DevicesAlexander PhiriNo ratings yet
- Electrocardiograph Ecg1200gDocument77 pagesElectrocardiograph Ecg1200gVero AyalaNo ratings yet
- How To Write Case Study PaperDocument3 pagesHow To Write Case Study PaperafibykkhxxhdidNo ratings yet
- Operating SystemDocument8 pagesOperating SystemMahmoud ElmahdyNo ratings yet
- Imanager U2000 V200R016C50 Single-Server System Software Installation and Commissioning Guide (Windows) 10 (PDF) - C PDFDocument418 pagesImanager U2000 V200R016C50 Single-Server System Software Installation and Commissioning Guide (Windows) 10 (PDF) - C PDFAnonymous 40MGQ4yJDKNo ratings yet
- Doors - Legit CheatsDocument2 pagesDoors - Legit CheatsPhat TruongNo ratings yet
- Resume AviragDocument2 pagesResume AviragAvi SrivastavaNo ratings yet
- The Importance of Science and Technology in The Modern WorldDocument2 pagesThe Importance of Science and Technology in The Modern WorldJohn Paolo Tamayo OrioNo ratings yet
- Engineering OfficeDocument2 pagesEngineering Officeadam smithNo ratings yet
- Paptrade Enterprises Pricelist Non VATDocument25 pagesPaptrade Enterprises Pricelist Non VATRose Ann Java MakilanNo ratings yet
- Open Workbook of CryptologyDocument92 pagesOpen Workbook of CryptologyBillo RaniNo ratings yet