Download as pdf or txt
You might also like
- A Machine Learning Model For Average Fuel Consumption in Heavy VehiclesDocument20 pagesA Machine Learning Model For Average Fuel Consumption in Heavy Vehiclesram krishnaNo ratings yet
- ZTE BTS Engineering Quality Check Manual For BTS Site English V1.1Document13 pagesZTE BTS Engineering Quality Check Manual For BTS Site English V1.1abiyoo100% (6)
- Global Evaluation of The Drivability of Calibrated Diesel Engine MapsDocument6 pagesGlobal Evaluation of The Drivability of Calibrated Diesel Engine MapsKhac-Hoang NguyenNo ratings yet
- Analysis of Maruti 800Document148 pagesAnalysis of Maruti 800Anup C67% (3)
- A Simulation Approach For Productivity Improvement of An IC FactoryDocument8 pagesA Simulation Approach For Productivity Improvement of An IC Factorycsrajmohan2924No ratings yet
- CADCAM Question Bank MID-2-1Document7 pagesCADCAM Question Bank MID-2-1Dokula GaneshkumarNo ratings yet
- A Machine Learning-Genetic Algorithm (ML-GA) Approach For Rapid Optimization Using High-Performance ComputingDocument13 pagesA Machine Learning-Genetic Algorithm (ML-GA) Approach For Rapid Optimization Using High-Performance Computing김형진No ratings yet
- Article MechanismMachineTheory Budinger PDFDocument17 pagesArticle MechanismMachineTheory Budinger PDFfei312chenNo ratings yet
- Methods For The Design and Development: Abstract. After The Domain-Spanning Conceptual Design, Engineers From DifferentDocument2 pagesMethods For The Design and Development: Abstract. After The Domain-Spanning Conceptual Design, Engineers From DifferentYãbeçk MâmNo ratings yet
- Mechanical Systems and Signal Processing: L. Farkas, D. Moens, S. Donders, D. VandepitteDocument10 pagesMechanical Systems and Signal Processing: L. Farkas, D. Moens, S. Donders, D. VandepitteZaid MangalgiriNo ratings yet
- Toolpath Sum PDFDocument1 pageToolpath Sum PDFsuhas_snaNo ratings yet
- A Machine Learning Model For Average Fuel Consumption in Heavy VehiclesDocument23 pagesA Machine Learning Model For Average Fuel Consumption in Heavy Vehiclesram krishna100% (5)
- Engine CalibrationDocument8 pagesEngine CalibrationbiopoweredNo ratings yet
- Types of Prediction: 1. Clustering and DownsamplingDocument2 pagesTypes of Prediction: 1. Clustering and Downsamplinganon_117906703No ratings yet
- Simulation and ModellingDocument10 pagesSimulation and ModellingEr Aamir Maqbool25% (4)
- Simulation Model From Lean maNF.Document16 pagesSimulation Model From Lean maNF.Ankita BaidNo ratings yet
- ModelingDocument4 pagesModelinghunterrr611No ratings yet
- Model Based Systems Engineering For Aircraft Systems - How DoesDocument9 pagesModel Based Systems Engineering For Aircraft Systems - How DoesAlmas QasimNo ratings yet
- Power Plant Simulator For OperatorsDocument2 pagesPower Plant Simulator For Operatorsalbert100% (1)
- A Model-Based Framework: An Approach For Profit-Driven OptimizationDocument11 pagesA Model-Based Framework: An Approach For Profit-Driven OptimizationSyakirah AzlanNo ratings yet
- Metamodeling by Using Multiple Regression Integrated K-Means Clustering AlgorithmDocument9 pagesMetamodeling by Using Multiple Regression Integrated K-Means Clustering AlgorithmFianchetto tNo ratings yet
- SSM Unit-8 VikDocument5 pagesSSM Unit-8 Vikpreeth_tNo ratings yet
- Week 3 Developing Simulation ModelsDocument35 pagesWeek 3 Developing Simulation ModelsGregory AlexNo ratings yet
- Week 3 Developing Simulation ModelsDocument35 pagesWeek 3 Developing Simulation ModelsGregory AlexNo ratings yet
- CAD-Based Parametric Cross-Section Designer For Gas Turbine Engine MDO ApplicationsDocument10 pagesCAD-Based Parametric Cross-Section Designer For Gas Turbine Engine MDO ApplicationsValiyakattel NilsNo ratings yet
- METAMODELS - Newsletter08-Eng PDFDocument5 pagesMETAMODELS - Newsletter08-Eng PDFds_srinivasNo ratings yet
- Advances in Engineering Software: M. Costa, U. Sorge, L. AlloccaDocument11 pagesAdvances in Engineering Software: M. Costa, U. Sorge, L. AlloccaAnh TuấnNo ratings yet
- DP-Designing and ImplementingDocument10 pagesDP-Designing and ImplementingSteven DohNo ratings yet
- Asi 02 00020Document30 pagesAsi 02 00020Sree ManasaNo ratings yet
- Specification and Design of Electronic Control UnitsDocument7 pagesSpecification and Design of Electronic Control UnitspbollaganiNo ratings yet
- Model-Based Development of Multi-Disciplinary Systems: White PaperDocument5 pagesModel-Based Development of Multi-Disciplinary Systems: White PaperAdarshKumarNo ratings yet
- Proceeding Book - Mahsa MinaeiDocument8 pagesProceeding Book - Mahsa MinaeiKshitij NashineNo ratings yet
- 1.Eng-Applying The Model Approach For Automated Testing Optimizing Compilers - 1 - 3Document12 pages1.Eng-Applying The Model Approach For Automated Testing Optimizing Compilers - 1 - 3Impact JournalsNo ratings yet
- CAT-2 NotesDocument26 pagesCAT-2 NotesDhanushNo ratings yet
- Evolutionary Multiobjective Optimization of A System-Level Motor Drive DesignDocument9 pagesEvolutionary Multiobjective Optimization of A System-Level Motor Drive Designthhluong.sdh232No ratings yet
- Mechatronic Model-Based Design Applied To An H-Bot RobotDocument18 pagesMechatronic Model-Based Design Applied To An H-Bot RobotMarian VerdeNo ratings yet
- Hybrid Palm Oil Mills Maintenance SystemDocument10 pagesHybrid Palm Oil Mills Maintenance SystemwanameiNo ratings yet
- GlobalLogic - Optimization Algorithms For Machine LearningDocument4 pagesGlobalLogic - Optimization Algorithms For Machine LearningKumar manickamNo ratings yet
- 94 Handling Distribution Shift inDocument8 pages94 Handling Distribution Shift inscribdtomsmith2No ratings yet
- Evolutionary Algorithm As A Tool For Advanced Designing of Diesel EnginesDocument12 pagesEvolutionary Algorithm As A Tool For Advanced Designing of Diesel EnginesNITSU009No ratings yet
- 10 1 1 98 9640 PDFDocument7 pages10 1 1 98 9640 PDFDev RaiNo ratings yet
- SMS Module 5Document11 pagesSMS Module 5voriroNo ratings yet
- Active SuspensionDocument6 pagesActive SuspensionSandor CleganeNo ratings yet
- MyPresentation 1Document11 pagesMyPresentation 1Gomathi Aashika GeorgeNo ratings yet
- Model-Based Development of A Dual-Clutch Transmission Using Rapid Prototyping and SilDocument11 pagesModel-Based Development of A Dual-Clutch Transmission Using Rapid Prototyping and SilNeacsu EugenNo ratings yet
- Reviewing The Multiobjective Optimization Package of Modefrontier in Energy Sector PDFDocument7 pagesReviewing The Multiobjective Optimization Package of Modefrontier in Energy Sector PDFAmir MosaviNo ratings yet
- Chapter 3&4&5Document24 pagesChapter 3&4&5sterlingNo ratings yet
- Calibration of Traffic Sumulation ModelsDocument12 pagesCalibration of Traffic Sumulation ModelsNexy zambrano mascoNo ratings yet
- Robust Design of Automotive Component Using Optimization Analysis in Nonlinear DomainDocument5 pagesRobust Design of Automotive Component Using Optimization Analysis in Nonlinear Domainendra79No ratings yet
- Mi 150105Document8 pagesMi 150105古鹏飞No ratings yet
- Self StudyDocument15 pagesSelf StudymadhuNo ratings yet
- Software Measurement, Cost Estimation, SLIM, COCOMO - Yazılım Ölçümü Maliyet HesabıDocument6 pagesSoftware Measurement, Cost Estimation, SLIM, COCOMO - Yazılım Ölçümü Maliyet HesabıAskanaNo ratings yet
- Engine Simulation in Power Programs (Chat GPT)Document2 pagesEngine Simulation in Power Programs (Chat GPT)konstadinos evangelouNo ratings yet
- Unit Number 1: Introduction To Chemical Engineering System OptimizationDocument6 pagesUnit Number 1: Introduction To Chemical Engineering System Optimizationkudra emmanuelNo ratings yet
- Clean Room Software EngineeringDocument39 pagesClean Room Software EngineeringVivek ChhabraNo ratings yet
- Simulation-Based Automatic Generation Signomial and Posynomial Performance Models Analog Integrated Circuit SizingDocument5 pagesSimulation-Based Automatic Generation Signomial and Posynomial Performance Models Analog Integrated Circuit Sizingsuchi87No ratings yet
- OPTICast Workbook 8-3-0 11-18-14Document51 pagesOPTICast Workbook 8-3-0 11-18-14emilianoNo ratings yet
- Surogate ModelingDocument11 pagesSurogate ModelingGamini SureshNo ratings yet
- Unit - 3 Feature EngineeringDocument29 pagesUnit - 3 Feature EngineeringSoumya MishraNo ratings yet
- TIME SERIES FORECASTING. ARIMAX, ARCH AND GARCH MODELS FOR UNIVARIATE TIME SERIES ANALYSIS. Examples with MatlabFrom EverandTIME SERIES FORECASTING. ARIMAX, ARCH AND GARCH MODELS FOR UNIVARIATE TIME SERIES ANALYSIS. Examples with MatlabNo ratings yet
- 6082 Aluminium AlloyDocument3 pages6082 Aluminium AlloyWeiso ChenNo ratings yet
- PS3-2 - Sequences Series, Rates, and Equation TheoryDocument6 pagesPS3-2 - Sequences Series, Rates, and Equation TheoryJoseph AparisNo ratings yet
- 2D Transformations and Homogeneous Coordinates: DR Nicolas HolzschuchDocument25 pages2D Transformations and Homogeneous Coordinates: DR Nicolas HolzschuchNirmalya SethNo ratings yet
- Iit Delhi SyllabusDocument1 pageIit Delhi Syllabusrakesh1987_careersNo ratings yet
- Tunnel PDFDocument128 pagesTunnel PDFAshwini ThakurNo ratings yet
- GalileoDocument9 pagesGalileoAkram KaladiaNo ratings yet
- Digital Technology in EndoDocument91 pagesDigital Technology in Endonandani kumariNo ratings yet
- DC GeneratorDocument15 pagesDC GeneratorNhilNo ratings yet
- ButterflyMX - Elevator Control Wiring DiagramDocument1 pageButterflyMX - Elevator Control Wiring DiagramSyed iliyasNo ratings yet
- Chapter9 Mathlinks8 UnitplanDocument10 pagesChapter9 Mathlinks8 Unitplanapi-271785617No ratings yet
- Topic 9 Broiler Industry (Hatchery Management)Document56 pagesTopic 9 Broiler Industry (Hatchery Management)Musonda MwapeNo ratings yet
- Lecture 19 BDocument6 pagesLecture 19 BHongYu HuiNo ratings yet
- Emergency Lights Central Battery System Testing and Commissioning Method of StatementDocument12 pagesEmergency Lights Central Battery System Testing and Commissioning Method of StatementAleen Gamal Al-DinjiNo ratings yet
- MY EXCEL GUIDE Beginners, Intermediate, Advanced - Microsoft ExcelDocument57 pagesMY EXCEL GUIDE Beginners, Intermediate, Advanced - Microsoft Excelcharlotte.adgNo ratings yet
- Bending Strength and Nondestructive Evaluation of Structural BambooDocument5 pagesBending Strength and Nondestructive Evaluation of Structural BambooLuanna Silva de Pires Campos AlvesNo ratings yet
- C Multiphysics: OmsolDocument98 pagesC Multiphysics: OmsolWill BenavidesNo ratings yet
- SIEMENS S7-1500 Power Module Ps 60w 24-48-60vdc Manual en US en-USDocument28 pagesSIEMENS S7-1500 Power Module Ps 60w 24-48-60vdc Manual en US en-USl1f3b00kNo ratings yet
- WSForcogsa Service Old 3Document4 pagesWSForcogsa Service Old 3Baltazar PazosNo ratings yet
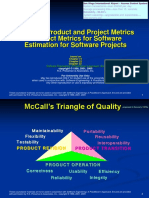
- Process, Product and Project Metrics Product Metrics For Software Estimation For Software ProjectsDocument46 pagesProcess, Product and Project Metrics Product Metrics For Software Estimation For Software ProjectsNassah AllaabNo ratings yet
- SQL SimplifiedDocument11 pagesSQL SimplifiedHarshNo ratings yet
- Spy USB Stick: User ManualDocument9 pagesSpy USB Stick: User ManualCarlos Augusto SandrinNo ratings yet
- Paper 3Document20 pagesPaper 3habtamu tamiruNo ratings yet
- Breve Catálogo de Productos - MASON IndustriesDocument4 pagesBreve Catálogo de Productos - MASON IndustriesAndres SanchezNo ratings yet
- Class 8 CH 5 Data Handling August 19Document3 pagesClass 8 CH 5 Data Handling August 19shayn budihardjoNo ratings yet
- 74HC273 74HCT273: 1. General DescriptionDocument17 pages74HC273 74HCT273: 1. General DescriptionAntony BurgersNo ratings yet
- Lab 1204Document5 pagesLab 1204Yash RajNo ratings yet
- Lxw1028735ref - SB KL Ex Ba Si - 1220001412Document51 pagesLxw1028735ref - SB KL Ex Ba Si - 1220001412johnahearne8639No ratings yet
- Engineering Thermodynamics 2 MarksDocument16 pagesEngineering Thermodynamics 2 MarksSanjeev PawarNo ratings yet
- DNA DamageDocument49 pagesDNA DamagekurniaadhiNo ratings yet