Download as pdf or txt
You might also like
- Brand Specialist - AmazonDocument1 pageBrand Specialist - AmazonmxalfonNo ratings yet
- Symap A2 Eventbuilder EDocument54 pagesSymap A2 Eventbuilder EAlfredo Jiménez100% (2)
- Martello, S., Pisinger, D., & Vigo, D. (2000) - The Three-Dimensional Bin Packing ProblemDocument13 pagesMartello, S., Pisinger, D., & Vigo, D. (2000) - The Three-Dimensional Bin Packing Problemomega uniqueNo ratings yet
- On Compressing Frequent Patterns: Dong Xin, Jiawei Han, Xifeng Yan, Hong ChengDocument25 pagesOn Compressing Frequent Patterns: Dong Xin, Jiawei Han, Xifeng Yan, Hong ChengRutba AmanNo ratings yet
- Computational Geometry: Theory and Applications: Jens Egeblad, Benny K. Nielsen, Marcus BrazilDocument20 pagesComputational Geometry: Theory and Applications: Jens Egeblad, Benny K. Nielsen, Marcus BrazilDAVIDNo ratings yet
- Improving Flexibility and Efficiency by Adding Parallelism To Genetic AlgorithmsDocument24 pagesImproving Flexibility and Efficiency by Adding Parallelism To Genetic AlgorithmsEl FyruzuNo ratings yet
- A Genetic-Based Framework For Solving (Multi-Criteria) Weighted Matching ProblemsDocument25 pagesA Genetic-Based Framework For Solving (Multi-Criteria) Weighted Matching ProblemsCESARPINEDANo ratings yet
- Optimisation of Laminated Composite Materials Using A Genetic AlgorithmDocument3 pagesOptimisation of Laminated Composite Materials Using A Genetic Algorithmsel2183vamNo ratings yet
- Computers & Industrial Engineering: Samah Boukhari, Isma Dahmani, Mhand HifiDocument15 pagesComputers & Industrial Engineering: Samah Boukhari, Isma Dahmani, Mhand HifiYassine AdouaniNo ratings yet
- 10.1007@s10898 020 00890 3 PDFDocument36 pages10.1007@s10898 020 00890 3 PDFamirehosseinNo ratings yet
- Pisinger, D., & Sigurd, M. (2007) - Using Decomposition Techniques and Constraint Programming For Solving The Two-Dimensional Bin-Packing ProblemDocument16 pagesPisinger, D., & Sigurd, M. (2007) - Using Decomposition Techniques and Constraint Programming For Solving The Two-Dimensional Bin-Packing Problemomega uniqueNo ratings yet
- 1997 Bison A Fast Hybrid Procedure For Exactly Solving BPPDocument19 pages1997 Bison A Fast Hybrid Procedure For Exactly Solving BPPaegr82No ratings yet
- PAPER ORGINAL (Msr+Taguchi+Vinning+Myers+Jqtv22i1vining)Document8 pagesPAPER ORGINAL (Msr+Taguchi+Vinning+Myers+Jqtv22i1vining)RQP1029No ratings yet
- Two-Dimensional Packing Problems: A Survey: Andrea Lodi, Silvano Martello, Michele MonaciDocument12 pagesTwo-Dimensional Packing Problems: A Survey: Andrea Lodi, Silvano Martello, Michele MonaciZeroNo ratings yet
- European Journal of Operational Research: Tsan Sheng NGDocument11 pagesEuropean Journal of Operational Research: Tsan Sheng NGVieriu AlexandraNo ratings yet
- A Hybrid Grouping Genetic Algorithm For Bin PackingDocument24 pagesA Hybrid Grouping Genetic Algorithm For Bin PackingYouth ZoomNo ratings yet
- A Directed Genetic Algorithm For Global OptimizationDocument17 pagesA Directed Genetic Algorithm For Global OptimizationParth TrivediNo ratings yet
- 2008 Solving The One-Dimensional Bin Packing Problem With A WeightDocument9 pages2008 Solving The One-Dimensional Bin Packing Problem With A Weightaegr82No ratings yet
- Unified Analysis of Finite Volume Methods For Second Order ElliptDocument17 pagesUnified Analysis of Finite Volume Methods For Second Order Ellipt5ggq85c8r4No ratings yet
- GS-OPT: A New Fast Stochastic Algorithm For Solving The Non-Convex Optimization ProblemDocument10 pagesGS-OPT: A New Fast Stochastic Algorithm For Solving The Non-Convex Optimization ProblemIAES IJAINo ratings yet
- A 99 Line Topology Optimization Code Written in MatlabDocument8 pagesA 99 Line Topology Optimization Code Written in MatlabOmar Eladel MahmoudNo ratings yet
- A Stochastic Algorithm For Solving The Posterior Inference Problem in Topic ModelsDocument8 pagesA Stochastic Algorithm For Solving The Posterior Inference Problem in Topic ModelsTELKOMNIKANo ratings yet
- Comparison of The Optimal DesignDocument10 pagesComparison of The Optimal DesignAlexander DeckerNo ratings yet
- 2008 Infinite Kernel Learning Via Infinite AnDocument34 pages2008 Infinite Kernel Learning Via Infinite AnRiri LestariNo ratings yet
- Termination Criteria in Computerized Adaptive Tests: Variable-Length Cats Are Not BiasedDocument21 pagesTermination Criteria in Computerized Adaptive Tests: Variable-Length Cats Are Not BiasedFahri SaputraNo ratings yet
- A Response Surface Approach To Tolerance Design: Statistica Neerlandica (2006) Vol. 60, Nr. 3, Pp. 379-395Document17 pagesA Response Surface Approach To Tolerance Design: Statistica Neerlandica (2006) Vol. 60, Nr. 3, Pp. 379-395tarcisioNo ratings yet
- A Novel Hybrid Differential Evolution Algorithm: A Comparative Study On Function OptimizationDocument6 pagesA Novel Hybrid Differential Evolution Algorithm: A Comparative Study On Function OptimizationRamya Dsp PNo ratings yet
- Ga 1Document15 pagesGa 1Sumala G LakshmiNo ratings yet
- Computers & Operations Research: Lijun Wei, Defu Zhang, Qingshan ChenDocument7 pagesComputers & Operations Research: Lijun Wei, Defu Zhang, Qingshan ChenHamza ElNo ratings yet
- A Numerical Study of The Limited Memory BFGS Method and The Truncated-Newton Method For Large Scale OptimizationDocument15 pagesA Numerical Study of The Limited Memory BFGS Method and The Truncated-Newton Method For Large Scale OptimizationパプリカNo ratings yet
- Goldfarb IdnaniDocument33 pagesGoldfarb Idnanifzhang756115100% (1)
- 2016 Hybrid Approach For The Two-Dimensional Bin Packing ProblemDocument11 pages2016 Hybrid Approach For The Two-Dimensional Bin Packing Problemaegr82No ratings yet
- Video 18Document17 pagesVideo 18kamutmazNo ratings yet
- Applying Genetic Algorithms in Fuzzy Optimization Problems: Deparment of Computer Science and Articial IntelligenceDocument15 pagesApplying Genetic Algorithms in Fuzzy Optimization Problems: Deparment of Computer Science and Articial IntelligencetissatomNo ratings yet
- Can We Make Genetic Algorithms Work in High-Dimensionality Problems?Document17 pagesCan We Make Genetic Algorithms Work in High-Dimensionality Problems?kilo929756No ratings yet
- Nesting of Two-Dimensional Irregular Parts PDFDocument16 pagesNesting of Two-Dimensional Irregular Parts PDFJohnny VillarroelNo ratings yet
- Optimierung Mittels Genetischen AlgorythmenDocument10 pagesOptimierung Mittels Genetischen AlgorythmenYunus Emre HarmancıNo ratings yet
- Mixed Integer Linear Programming For Maximum-Parsimony Phylogeny InferenceDocument9 pagesMixed Integer Linear Programming For Maximum-Parsimony Phylogeny InferenceAnonymous RrGVQjNo ratings yet
- A Bottom Up Packing Approach For Modeling The Constrai - 2020 - Computers - OperDocument19 pagesA Bottom Up Packing Approach For Modeling The Constrai - 2020 - Computers - OperCamara OumarNo ratings yet
- Preconditioning of Truncated-Newton MethodsDocument18 pagesPreconditioning of Truncated-Newton MethodsパプリカNo ratings yet
- Paper EconometricaDocument37 pagesPaper EconometricaAlissa BarnesNo ratings yet
- Divide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyDocument26 pagesDivide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyTiberiu TincaNo ratings yet
- Mixed Integer Linear Programming For Maximum Parsimony Phylogeny InferenceDocument20 pagesMixed Integer Linear Programming For Maximum Parsimony Phylogeny Inferencehahiep219No ratings yet
- Quadrature Rules For Isogeometric Shell Formulations: Study Using A Real-World Application About Metal FormingDocument16 pagesQuadrature Rules For Isogeometric Shell Formulations: Study Using A Real-World Application About Metal FormingJorge Luis Garcia ZuñigaNo ratings yet
- Globally Solving Nonconvex Quadratic Programming Problems Via Completely Positive Programming-2011Document19 pagesGlobally Solving Nonconvex Quadratic Programming Problems Via Completely Positive Programming-2011Shah AzNo ratings yet
- Pergamon: Scope andDocument13 pagesPergamon: Scope andSaravananNo ratings yet
- Ratnn Si 2015 09 04Document23 pagesRatnn Si 2015 09 04tigerman manNo ratings yet
- Genetic Algorithm: Artificial Neural Networks (Anns)Document10 pagesGenetic Algorithm: Artificial Neural Networks (Anns)Partth VachhaniNo ratings yet
- Multivariate Process Control Chart For Controlling The False Discovery RateDocument5 pagesMultivariate Process Control Chart For Controlling The False Discovery RateManprita BasumataryNo ratings yet
- Modified Differential Evolution (MDE) For Optimization of Non-Linear Chemical ProcessesDocument14 pagesModified Differential Evolution (MDE) For Optimization of Non-Linear Chemical ProcessesBAKRNo ratings yet
- A Duality Theory Approach To The Environmental-Economic Dispatch ProblemDocument10 pagesA Duality Theory Approach To The Environmental-Economic Dispatch ProblemHakan ÇAMNo ratings yet
- Pgagenplan (Ieee Trans) 2Document8 pagesPgagenplan (Ieee Trans) 2bhumaniNo ratings yet
- An Alternative Approach For PDE-Constrained Optimization Via Genetic AlgorithmDocument14 pagesAn Alternative Approach For PDE-Constrained Optimization Via Genetic AlgorithmDani FernandesNo ratings yet
- 2019 - SEED - Juan de Anda, Carpio, Et AlDocument13 pages2019 - SEED - Juan de Anda, Carpio, Et AlLuis Eduardo Ronquillo OrdoñezNo ratings yet
- Mixed integerProgrammingModelforTwo Dimensionalnon guillotineBinPackingProblemwithFreeRotationDocument6 pagesMixed integerProgrammingModelforTwo Dimensionalnon guillotineBinPackingProblemwithFreeRotation99ozgunbNo ratings yet
- Interval AnalysisDocument7 pagesInterval AnalysisAhmet SaygıNo ratings yet
- Numerical Solutions of The Coupled Unsteady Nonlinear Convection-Diffusion Equations Based On Generalized Finite Difference MethodDocument20 pagesNumerical Solutions of The Coupled Unsteady Nonlinear Convection-Diffusion Equations Based On Generalized Finite Difference MethodAshishNo ratings yet
- Computer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionFrom EverandComputer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionNo ratings yet
- V400111 - Introduction To Visual Arts SyllabusDocument3 pagesV400111 - Introduction To Visual Arts SyllabusCharlyne Mari FloresNo ratings yet
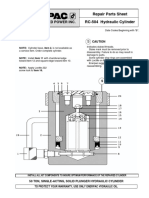
- Manuel de Partes y Reparacion Cilindro RC 504Document2 pagesManuel de Partes y Reparacion Cilindro RC 504Mauricio Hermosilla OrellanaNo ratings yet
- Safety Valves and Double Stop ValvesDocument24 pagesSafety Valves and Double Stop ValvesRahul PatilNo ratings yet
- Detective Conan Main Theme Sax Quartet-Alto Sax 2Document2 pagesDetective Conan Main Theme Sax Quartet-Alto Sax 2Rooney ChinNo ratings yet
- 3 DATA SCIENCE COURSE - Machine Learning CourseDocument3 pages3 DATA SCIENCE COURSE - Machine Learning Coursemohammed KhalidNo ratings yet
- 5.4 Metals - Stock Forms 2021Document2 pages5.4 Metals - Stock Forms 2021justinchu1505No ratings yet
- What Is Chat GPT?Document7 pagesWhat Is Chat GPT?BCANo ratings yet
- Worldwide Hybrid Cloud Workload Security Market Shares, 2019: Vendor Growth Comes in All Shapes and SizesDocument21 pagesWorldwide Hybrid Cloud Workload Security Market Shares, 2019: Vendor Growth Comes in All Shapes and SizesCHRISTIAN JERSON HURTADO SAUCEDONo ratings yet
- John Raven D. Patidio - Activity 4 Week 4Document2 pagesJohn Raven D. Patidio - Activity 4 Week 4raven patidioNo ratings yet
- Compressor Fans and Blowers ProblemsDocument2 pagesCompressor Fans and Blowers ProblemsVEGA DARRENNo ratings yet
- KB5015684: Featured Update To Windows 10, Version 22H2 by Using An Enablement Package - Microsoft SuDocument1 pageKB5015684: Featured Update To Windows 10, Version 22H2 by Using An Enablement Package - Microsoft SuAllamNo ratings yet
- Health and Med Tech SadhanaDocument94 pagesHealth and Med Tech SadhanaRanjith KumarNo ratings yet
- VALMEX ShadowDocument2 pagesVALMEX ShadowShaikh Muhammad AteeqNo ratings yet
- Tanmay Kabra 7years DFT CVDocument2 pagesTanmay Kabra 7years DFT CVTanmayKabraNo ratings yet
- M312 and M315 Excavators Hydraulic System: M312: 6TL635-UP M315: 7ML1215-UPDocument2 pagesM312 and M315 Excavators Hydraulic System: M312: 6TL635-UP M315: 7ML1215-UPariel rubio100% (1)
- Quadratic PlaygroundDocument4 pagesQuadratic PlaygroundNARENDRAN SNo ratings yet
- Intervalos de Confianza y Pruebas de HipótesisDocument16 pagesIntervalos de Confianza y Pruebas de HipótesisANDRES100% (1)
- Handout Bar Graph Formative Assessment Rubric 4stu LandDocument1 pageHandout Bar Graph Formative Assessment Rubric 4stu LandJocelyn ReamicoNo ratings yet
- Guide To Application For Water SupplyDocument141 pagesGuide To Application For Water SupplyWai Ling WongNo ratings yet
- Key Business Analytics - The 60+ Business Analysis Tools Every Manager Needs To Know.Document8 pagesKey Business Analytics - The 60+ Business Analysis Tools Every Manager Needs To Know.stefany AlejandroNo ratings yet
- Summary of Quantities: 2.44m. X 2.44m. PRINTED IN TARPAULIN ON 12Mm. Thk. Marine Plywood W/ Coco FrameDocument1 pageSummary of Quantities: 2.44m. X 2.44m. PRINTED IN TARPAULIN ON 12Mm. Thk. Marine Plywood W/ Coco FrameKim Gilbie AbordoNo ratings yet
- UNIT I - Cloud ComputingDocument57 pagesUNIT I - Cloud ComputingSHERWIN JOE 30No ratings yet
- AxiATA Sustainability Report 2016Document115 pagesAxiATA Sustainability Report 2016Nurhalimah AnuarNo ratings yet
- D C S & E CSP 249 Dbms Lab Manual: Epartment of Omputer Cience NgineeringDocument12 pagesD C S & E CSP 249 Dbms Lab Manual: Epartment of Omputer Cience NgineeringLokesh YadavNo ratings yet
- Questionnaire: Cite References or SourcesDocument5 pagesQuestionnaire: Cite References or Sourcesgeeva rejoNo ratings yet
- Migrate POS ExtensionDocument23 pagesMigrate POS ExtensionArthurHwangNo ratings yet
- FSM500KDocument1 pageFSM500KMinhthien NguyenNo ratings yet
- Eaton Xeffect Residual Current Devices Brochure Br019004en en UsDocument8 pagesEaton Xeffect Residual Current Devices Brochure Br019004en en UsAndy FarleyNo ratings yet