Download as pdf or txt
You might also like
- A Differential Equation For DC MotorDocument7 pagesA Differential Equation For DC MotorAhmed HwaidiNo ratings yet
- Assignment 2Document5 pagesAssignment 2Chaitanya KumarNo ratings yet
- Transfer Function of DC MotorDocument16 pagesTransfer Function of DC Motorlaabi340% (5)
- Huawei APE4518R20v06Document3 pagesHuawei APE4518R20v06Marcelo Hernan LaurettiNo ratings yet
- EGo AIO ManualDocument6 pagesEGo AIO ManualBalaban CristiNo ratings yet
- FirmcusbDocument123 pagesFirmcusbAndry1975No ratings yet
- Basler DECS-300 Instruction ManualDocument191 pagesBasler DECS-300 Instruction ManualRitish Amal100% (1)
- DC Motor Control PositionDocument8 pagesDC Motor Control Positionreynaldi adeNo ratings yet
- Experiment 3: Modeling, Identi Cation, and Control of A DC-ServomotorDocument11 pagesExperiment 3: Modeling, Identi Cation, and Control of A DC-ServomotorAbhinant PetchngamjaratNo ratings yet
- Pages From Power Semiconductor Controlled Drives 1Document7 pagesPages From Power Semiconductor Controlled Drives 1vkamarajNo ratings yet
- Lecture 05 Electromechanical Systems Transfer FunctionsDocument13 pagesLecture 05 Electromechanical Systems Transfer FunctionsRakhmeen gulNo ratings yet
- Cambio de FrecuenciaDocument20 pagesCambio de FrecuenciaDarness Castillo RodriguezNo ratings yet
- Direct-Current MachinesDocument108 pagesDirect-Current MachinesHenry KabasaNo ratings yet
- The Mathematical Model of Inverter: Vasyl Tchaban, Dmytro PELESHKODocument3 pagesThe Mathematical Model of Inverter: Vasyl Tchaban, Dmytro PELESHKOShashi KumarNo ratings yet
- Lab1: Control/ Electronics System Design: 1/ Requirement AnalysisDocument16 pagesLab1: Control/ Electronics System Design: 1/ Requirement AnalysisJoseph NguyenNo ratings yet
- Analysis of Electrical Machines BankDocument66 pagesAnalysis of Electrical Machines BankChilambarasan MadhappanNo ratings yet
- Random Eletrical TextbookDocument3 pagesRandom Eletrical Textbookenoch tobeNo ratings yet
- 5-Lecture 05 Electromechanical Systems Transfer FunctionsDocument13 pages5-Lecture 05 Electromechanical Systems Transfer FunctionsHamza Khan100% (1)
- Speed Modeling of DC Motorcusing Tacho GeneratorDocument7 pagesSpeed Modeling of DC Motorcusing Tacho GeneratorAbanoub Malak SelemNo ratings yet
- EM Mattaria Ch1Document25 pagesEM Mattaria Ch1Osama AliNo ratings yet
- Transfer FunctionDocument40 pagesTransfer FunctionLai Yon Peng67% (3)
- Direct Wave Energy CoverterDocument4 pagesDirect Wave Energy Covertercaturhan007No ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- AC - Motor PracDocument9 pagesAC - Motor PracK PranavNo ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- Digital Simulation of Field-Oriented ControlDocument8 pagesDigital Simulation of Field-Oriented ControlNishantNo ratings yet
- ControlDocument18 pagesControlSiaka MsaleNo ratings yet
- EEE3001 Lab ManualDocument66 pagesEEE3001 Lab ManualReshab Sahoo100% (1)
- Chapter 2 Mathematical Models of ControlDocument36 pagesChapter 2 Mathematical Models of Controlherber_28No ratings yet
- Parameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentDocument6 pagesParameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentVoet ZoekerNo ratings yet
- College of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityDocument31 pagesCollege of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityFawzi RadwanNo ratings yet
- Modeling Electrical and Electromechanical Systems: Solenoid ActuatorDocument4 pagesModeling Electrical and Electromechanical Systems: Solenoid ActuatorDio Izqhaq Risky SasongkoNo ratings yet
- Shibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforDocument7 pagesShibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforJiraya15No ratings yet
- Lab 6Document30 pagesLab 6Mohit GriptaNo ratings yet
- Flyback PDFDocument11 pagesFlyback PDFlucianoNo ratings yet
- Liu 2012Document4 pagesLiu 2012semenzevsNo ratings yet
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Document11 pagesElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenNo ratings yet
- Radial and Axial Short-Circuit Electrodynamic Forces of Three Phase Power TransformersDocument6 pagesRadial and Axial Short-Circuit Electrodynamic Forces of Three Phase Power TransformersBodoShowNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Transfer Function Model For Electric VehicleDocument10 pagesTransfer Function Model For Electric VehicleFarhan MalikNo ratings yet
- High Efficiency DC-to-AC Power InverterDocument5 pagesHigh Efficiency DC-to-AC Power InverterDivyabharathi JanakiramanNo ratings yet
- Matlab and Simulink For Modeling and Control DC MotorDocument14 pagesMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiNo ratings yet
- Assignment TheoryDocument11 pagesAssignment TheoryChomfwix VlogsNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Modeling of DC MotorDocument8 pagesModeling of DC MotorKaziiLaggounNo ratings yet
- Principles of Electromechanical Energy ConversionDocument21 pagesPrinciples of Electromechanical Energy ConversionJehovah CoelhoNo ratings yet
- Single Phase TransformerDocument10 pagesSingle Phase Transformerঅন্বেষা সেনগুপ্তNo ratings yet
- Chang 2020Document14 pagesChang 2020René Mboyo KouayepNo ratings yet
- Voltage Tracking of A Multi-Input InterleavedDocument4 pagesVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALNo ratings yet
- Translational Mechanical System Transfer FunctionsDocument30 pagesTranslational Mechanical System Transfer FunctionsRhizhailNo ratings yet
- DC Motor Controller DesignDocument6 pagesDC Motor Controller Designudit mimaniNo ratings yet
- 2 Modeling DC Servo MotorsDocument4 pages2 Modeling DC Servo MotorsAnuradha Gupta67% (3)
- Chapter 4 - Lecture NotesDocument15 pagesChapter 4 - Lecture NotesZairul IzwanNo ratings yet
- Magnetic Circuits and Magnetic Materials - GDLCDocument13 pagesMagnetic Circuits and Magnetic Materials - GDLCAbderrahmen SellamiNo ratings yet
- FEM of Induction MotorDocument6 pagesFEM of Induction MotoromokhafeNo ratings yet
- GOENAGA APEC2013 Contactless Transfert Energy Piezoelectric ActuatorDocument9 pagesGOENAGA APEC2013 Contactless Transfert Energy Piezoelectric Actuatorjasta 11No ratings yet
- Ziegler-Nichols Tuning Method: Understanding The PID ControllerDocument13 pagesZiegler-Nichols Tuning Method: Understanding The PID ControllerSaran SelvanNo ratings yet
- In Robotic Drives, Printers, Machine Tools, Process Rolling Mills, Paper and Textile IndustriesDocument40 pagesIn Robotic Drives, Printers, Machine Tools, Process Rolling Mills, Paper and Textile IndustriesATULYA ALOK 17BEE0065No ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Analysis of Distortion Mechanisms Used in Rotary Steerable SystemsDocument16 pagesAnalysis of Distortion Mechanisms Used in Rotary Steerable SystemsEclipse ShuNo ratings yet
- Review Article: Machine Fault Signature AnalysisDocument11 pagesReview Article: Machine Fault Signature AnalysisEclipse ShuNo ratings yet
- Vibration Measurement ProceduresDocument8 pagesVibration Measurement ProceduresEclipse Shu100% (1)
- Vibration Measurement ProceduresDocument8 pagesVibration Measurement ProceduresEclipse ShuNo ratings yet
- D-Pro Action: Control UnitDocument116 pagesD-Pro Action: Control UnitAngel Irka PaunovNo ratings yet
- PID Controllers: Control Engineering by Dr. L. K. WongDocument34 pagesPID Controllers: Control Engineering by Dr. L. K. WongArulrajNo ratings yet
- Lab 3 Part 1 & 2Document4 pagesLab 3 Part 1 & 2lubuto TuntepeNo ratings yet
- Fiber Optic Sensor - Pages 32-47Document16 pagesFiber Optic Sensor - Pages 32-47JULIO CERECERONo ratings yet
- Design of EHV SubstationDocument66 pagesDesign of EHV SubstationMadanasekhar Tadimarri100% (1)
- Manual Del Medidor de CampoDocument17 pagesManual Del Medidor de CampoDavisGomezNo ratings yet
- Vehicle To Grid TechnologyDocument7 pagesVehicle To Grid TechnologyVIVA-TECH IJRINo ratings yet
- Sbos 094 BDocument30 pagesSbos 094 BQuan27299 ZhouNo ratings yet
- S ParametersDocument36 pagesS ParametersRegginNo ratings yet
- Water Cooled Copper Magnet CoilsDocument1 pageWater Cooled Copper Magnet Coilstsram90No ratings yet
- PD501 Monitor Manual-P6381 PDFDocument56 pagesPD501 Monitor Manual-P6381 PDFPatricio Aguilar100% (1)
- List of SymbolsDocument4 pagesList of Symbolsမိုး မိုးNo ratings yet
- 1LG4183-2AA60 Datasheet enDocument1 page1LG4183-2AA60 Datasheet enJuan Carlos TolabaNo ratings yet
- Microwave OvenDocument40 pagesMicrowave OvenPalak Mehra50% (2)
- QSL9-G3: Emissions Compliance: EU Stage IIIA at 50 HZ EPA NSPS Stationary Emergency Tier 3Document10 pagesQSL9-G3: Emissions Compliance: EU Stage IIIA at 50 HZ EPA NSPS Stationary Emergency Tier 3mohsen_cumminsNo ratings yet
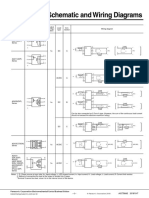
- Photomos Schematic and Wiring DiagramsDocument5 pagesPhotomos Schematic and Wiring DiagramsSherif SabryNo ratings yet
- Solar Based Iot Based Home Automation (Group 2)Document16 pagesSolar Based Iot Based Home Automation (Group 2)rahad410447No ratings yet
- Cryogenic Electronics: Poles and ZerosDocument1 pageCryogenic Electronics: Poles and ZerosMadhu JbNo ratings yet
- RadiationDocument17 pagesRadiationCheppanu BrotherNo ratings yet
- Description Features: Ltc5598 5Mhz To 1600Mhz High Linearity Direct Quadrature ModulatorDocument16 pagesDescription Features: Ltc5598 5Mhz To 1600Mhz High Linearity Direct Quadrature ModulatorMarcos CervettoNo ratings yet
- F60UP30DN Fairchild SemiconductorDocument5 pagesF60UP30DN Fairchild Semiconductords_engenharia8817No ratings yet
- Diode Protection For Redundant Power SuppliesDocument4 pagesDiode Protection For Redundant Power SuppliesHarish Kumar MNo ratings yet
- Datasheet Lm311Document10 pagesDatasheet Lm311Ed FreemanNo ratings yet
- Documents - Pub - JVC KD Adv38 Avx33 Ma321 SM PDFDocument81 pagesDocuments - Pub - JVC KD Adv38 Avx33 Ma321 SM PDFjavierNo ratings yet
- Sinamics g120c En-UsDocument316 pagesSinamics g120c En-UsHoangBaoĐenNo ratings yet
- SSC JE 2016 Electrical Set-1 With KeyDocument16 pagesSSC JE 2016 Electrical Set-1 With KeyJitesh EmmanuelNo ratings yet