Download as pdf or txt
You might also like
- ANT-ADU4516R6v06-2199 DatasheetDocument2 pagesANT-ADU4516R6v06-2199 DatasheetSergio Ernesto Villegas Milano100% (2)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- HANSEN, Mark. New Philosophy For New MediaDocument372 pagesHANSEN, Mark. New Philosophy For New MediaSoniaMontaño100% (2)
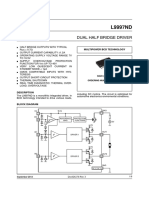
- Dual Full-Bridge Driver: DescriptionDocument100 pagesDual Full-Bridge Driver: DescriptionFunashima CostaNo ratings yet
- L298PDocument14 pagesL298Pkakaw.ventas.2018No ratings yet
- Datasheetl 293 DDocument9 pagesDatasheetl 293 Dcristian torresNo ratings yet
- TB6674FAG ToshibaDocument18 pagesTB6674FAG ToshibalucianassisNo ratings yet
- H-Bridge Driver Push-Pull Four Channel/Dual: Pin ConnectionDocument6 pagesH-Bridge Driver Push-Pull Four Channel/Dual: Pin ConnectionromicaNo ratings yet
- LM311 IC Data SheetDocument10 pagesLM311 IC Data SheetcallkalaiNo ratings yet
- Low Power Dual Voltage Comparators: DescriptionDocument11 pagesLow Power Dual Voltage Comparators: DescriptionAlexsander MeloNo ratings yet
- Tap Position TransducerDocument1 pageTap Position Transducerjunnior23No ratings yet
- LM393Document4 pagesLM393maher mlbaseNo ratings yet
- Tca 785 DatasheetDocument18 pagesTca 785 DatasheetCarlos SilvaNo ratings yet
- HCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsDocument10 pagesHCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsPendawa SeribuNo ratings yet
- HCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsDocument9 pagesHCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsEngin UzunNo ratings yet
- Feature: CONCEPT Repair Data BaseDocument4 pagesFeature: CONCEPT Repair Data BaseRaul Trujillo PNo ratings yet
- Power Supply Battery Charger Regulation Control Circuit: Semiconductor Technical DataDocument20 pagesPower Supply Battery Charger Regulation Control Circuit: Semiconductor Technical DataKarim MuhammedNo ratings yet
- Low Power Quad Voltage Comparator: DescriptionDocument10 pagesLow Power Quad Voltage Comparator: DescriptionJesus Almanzar SantosNo ratings yet
- Datasheet Tca 785Document16 pagesDatasheet Tca 785ronaldotecnicoNo ratings yet
- L289 BDocument12 pagesL289 BYanina YaninaNo ratings yet
- HCF4026B: Decade Counter/Divider With Decoded 7-Segment Display Output and Display EnableDocument11 pagesHCF4026B: Decade Counter/Divider With Decoded 7-Segment Display Output and Display EnableLuis GrugerNo ratings yet
- VU Meter A Led, KA2284Document3 pagesVU Meter A Led, KA2284hamed sazegaranNo ratings yet
- TD 310Document9 pagesTD 310Paresh PanchalNo ratings yet
- RunnTech P9000 Proportional AmplifierDocument3 pagesRunnTech P9000 Proportional AmplifierRunnTechNo ratings yet
- BSP742R Cat 938H 1651286Document17 pagesBSP742R Cat 938H 1651286Leandro SilvaNo ratings yet
- LTC1771 DemomanualDocument8 pagesLTC1771 Demomanualmekki1No ratings yet
- 2A Switching Regulator: 1 FeaturesDocument22 pages2A Switching Regulator: 1 FeaturesManuelAlejandroVicuñaRojasNo ratings yet
- GS324-Low Power QUAD Operational AmplifiersDocument9 pagesGS324-Low Power QUAD Operational AmplifiersFlaviano Costa SilvaNo ratings yet
- Power Amplifier For Driving A Deflection Circuit of A Color TelevisionDocument5 pagesPower Amplifier For Driving A Deflection Circuit of A Color TelevisionShamol KormokerNo ratings yet
- 2703 PDFDocument6 pages2703 PDFRadu PaulNo ratings yet
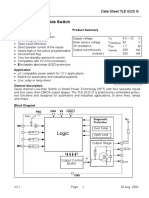
- Smart Power High-Side-Switch: Features Product SummaryDocument16 pagesSmart Power High-Side-Switch: Features Product SummaryMarquinho SilvaNo ratings yet
- Dmos Dual Full Bridge Driver: Multipower BCD TechnologyDocument11 pagesDmos Dual Full Bridge Driver: Multipower BCD TechnologyChristian BiancoNo ratings yet
- Dual Operational Amplifiers: Product Description FeaturesDocument9 pagesDual Operational Amplifiers: Product Description FeaturesMendez VeronicaNo ratings yet
- Multifunction Very Low Drop Voltage Regulator: DescriptionDocument10 pagesMultifunction Very Low Drop Voltage Regulator: DescriptionErasmo FrancoNo ratings yet
- Regulador 4949ed PDFDocument11 pagesRegulador 4949ed PDFluizNo ratings yet
- TLE6225GPDocument10 pagesTLE6225GPNoelNo ratings yet
- Smart Power High-Side-Switch: BSP 762 TDocument16 pagesSmart Power High-Side-Switch: BSP 762 TAlejandro ArangurenNo ratings yet
- Infineon Bts6133d Ds v01 00 enDocument17 pagesInfineon Bts6133d Ds v01 00 enmarino246No ratings yet
- Wide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351Document10 pagesWide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351romanbun1No ratings yet
- Utc 2822 DDocument5 pagesUtc 2822 DVinícius MottaNo ratings yet
- LM 1815Document6 pagesLM 1815Abbode HoraniNo ratings yet
- LM1801Document10 pagesLM1801sbgayenNo ratings yet
- Smart Power High-Side-Switch: Product Summary FeaturesDocument18 pagesSmart Power High-Side-Switch: Product Summary FeaturesbelchiorNo ratings yet
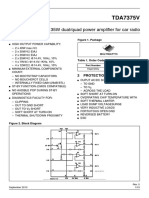
- 2 X 35W Dual/quad Power Amplifier For Car Radio: TDA7375VDocument15 pages2 X 35W Dual/quad Power Amplifier For Car Radio: TDA7375VAnonymous ZmRV6WqNo ratings yet
- Tda 7375 VDocument15 pagesTda 7375 Viyc09096No ratings yet
- ZXCDocument9 pagesZXCArda AkberkNo ratings yet
- DatasheetDocument14 pagesDatasheetTeyfik koyuncuNo ratings yet
- TLE6225GDocument9 pagesTLE6225GNoelNo ratings yet
- 74VHCT139A: Dual 2 To 4 Decoder/DemultiplexerDocument8 pages74VHCT139A: Dual 2 To 4 Decoder/DemultiplexerCyro PereiraNo ratings yet
- KA2131 SamsungDocument4 pagesKA2131 SamsungTito PerezNo ratings yet
- l6205 Driver MotorDocument21 pagesl6205 Driver MotorLeon MartinezNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)From EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)No ratings yet
- Sample An EPC Project 1Document133 pagesSample An EPC Project 1bahrowiadiNo ratings yet
- Distribution in A Services ContextDocument26 pagesDistribution in A Services ContextShah Maqsumul Masrur TanviNo ratings yet
- Questions-For-Dotnet-Professionals - HTML FresherDocument207 pagesQuestions-For-Dotnet-Professionals - HTML FresherPrintesh PatelNo ratings yet
- Usha DADocument3 pagesUsha DAjaniNo ratings yet
- Simple Steam Distillation (MT-114)Document11 pagesSimple Steam Distillation (MT-114)Quo EtaNo ratings yet
- Earn Money Online 100 Percent Gurrenty Payment and Work Totally Free. Just Take A Chance Its Real. Use Link To RegisterDocument1 pageEarn Money Online 100 Percent Gurrenty Payment and Work Totally Free. Just Take A Chance Its Real. Use Link To Registermt khanNo ratings yet
- G7 - Waste Reuse in Civil Engineering Works.Document16 pagesG7 - Waste Reuse in Civil Engineering Works.Prashant DwivediNo ratings yet
- Emailer ICICI Ascend Program - 10-23-2019 - 14 - 37 - 10Document2 pagesEmailer ICICI Ascend Program - 10-23-2019 - 14 - 37 - 10divyansh khandujaNo ratings yet
- Tank CalibrationDocument21 pagesTank Calibrationhoxx82No ratings yet
- CompDocument40 pagesCompharshal2000No ratings yet
- Okanagan Charter: An International Charter For Health Promoting Universities & CollegesDocument12 pagesOkanagan Charter: An International Charter For Health Promoting Universities & CollegesAshley DayanaNo ratings yet
- Storm AppliedDocument2 pagesStorm AppliedDreamtech PressNo ratings yet
- Plano Hidraulico 994KDocument15 pagesPlano Hidraulico 994KIr Ram MoNo ratings yet
- Process Flow Chart Assy ECU Waterproof & Non-WaterproofDocument9 pagesProcess Flow Chart Assy ECU Waterproof & Non-WaterproofAndi KamriNo ratings yet
- Roll Number Name Saptarshi Debnath Date of Birth 25-02-2004 Category Obc-Ncl Gender MaleDocument2 pagesRoll Number Name Saptarshi Debnath Date of Birth 25-02-2004 Category Obc-Ncl Gender MaleSAPTARSHI DEBNATHNo ratings yet
- Bombas de Incêndio 13-4NDocument53 pagesBombas de Incêndio 13-4NRobson Custódio de SouzaNo ratings yet
- Writing For Media BJ0034Document5 pagesWriting For Media BJ0034mani4533No ratings yet
- Clark SM 690 Service ManualDocument20 pagesClark SM 690 Service Manualjacqueline100% (62)
- Igw GuidelinesDocument49 pagesIgw Guidelineskrul786100% (1)
- Cracks in Concrete & RemediesDocument60 pagesCracks in Concrete & Remediesrjain_rdc50% (2)
- Ch-2 Strategy OMDocument8 pagesCh-2 Strategy OMAditya AgrawalNo ratings yet
- Appium Studio: Appium Testing Made Easy at Any ScaleDocument14 pagesAppium Studio: Appium Testing Made Easy at Any ScaleRicardo ValenzuelaNo ratings yet
- Design of Column Base Plates Anchor Bolt KHALED EID PDF - Google SearchDocument2 pagesDesign of Column Base Plates Anchor Bolt KHALED EID PDF - Google Searchgodofredo dumaliNo ratings yet
- New Products Management Merle Crawford & Anthony Di Benedetto 9th EditionDocument39 pagesNew Products Management Merle Crawford & Anthony Di Benedetto 9th EditionFaizan Babar100% (1)
- Rav4 ON-VEHICLE-ADJUSTMENTS PDFDocument42 pagesRav4 ON-VEHICLE-ADJUSTMENTS PDFMiguel A. Ramirez50% (2)
- J2ME Viva Questions & AnswersDocument10 pagesJ2ME Viva Questions & Answersnayanisateesh2805No ratings yet
- Max Ethernet and TCP ThroughputDocument8 pagesMax Ethernet and TCP ThroughputJoshua FonsecaNo ratings yet
- Software JK Sim MetDocument25 pagesSoftware JK Sim MetJorge TticaNo ratings yet