Download as pdf or txt
You might also like
- Ex2-Shunt WoundDCGenerator - Ver3Document7 pagesEx2-Shunt WoundDCGenerator - Ver3John C. CarlsenNo ratings yet
- ELG3316 - Transformer Lab - Fall 2016Document24 pagesELG3316 - Transformer Lab - Fall 2016Nicolas SalcedoNo ratings yet
- Atlas: Advanced Telemetry Linked Acquisition SystemDocument3 pagesAtlas: Advanced Telemetry Linked Acquisition Systemmkdir911No ratings yet
- Expt2 IC152 EEDocument10 pagesExpt2 IC152 EEomkargavali104No ratings yet
- MOHD SYAHMI AKMAL BIN SHAHBUDIN STUDENT - Exp1 - LTspice - G3Document6 pagesMOHD SYAHMI AKMAL BIN SHAHBUDIN STUDENT - Exp1 - LTspice - G3Hariz AkmalNo ratings yet
- Project ReportDocument20 pagesProject ReportUddesh ChakrabortyNo ratings yet
- Swcad Iii Steady State Ac Analysis: An Example CircuitDocument5 pagesSwcad Iii Steady State Ac Analysis: An Example Circuitthiago.tecNo ratings yet
- Exp02v H1Document6 pagesExp02v H1jaswinder singhNo ratings yet
- 24VDCDocument6 pages24VDCAB-S ELECTRO MECHANICAL INDUSTRIAL AUTOMATIONNo ratings yet
- Electric Circuit Analysis (EE - 116) DE-44 Mechatronics: SyndicateDocument7 pagesElectric Circuit Analysis (EE - 116) DE-44 Mechatronics: SyndicateXi PetaNo ratings yet
- University of Asia Pacific: Department-EEE Course Code - EEE-204 Course Name - Machine - IDocument20 pagesUniversity of Asia Pacific: Department-EEE Course Code - EEE-204 Course Name - Machine - InayonNo ratings yet
- Load Test TransformerDocument10 pagesLoad Test TransformerUpinder Pal Singh0% (1)
- ENA Lab 11 PDFDocument6 pagesENA Lab 11 PDFZainab MansoorNo ratings yet
- Simulation of Buck DC DC ConverterDocument3 pagesSimulation of Buck DC DC ConverterAleenaNo ratings yet
- AB-30 V-I and I-V Converter: An ISO 9001: 2000 CompanyDocument23 pagesAB-30 V-I and I-V Converter: An ISO 9001: 2000 CompanyWandi WandaniNo ratings yet
- EEE260 Exp3Document2 pagesEEE260 Exp3shoiliebuet09No ratings yet
- EE251 Experiment 02Document5 pagesEE251 Experiment 02Ziad HaliloNo ratings yet
- Applications of Opamp As Comparators & Schmitt TriggerDocument4 pagesApplications of Opamp As Comparators & Schmitt TriggerPaul JambormiasNo ratings yet
- Ade Lab Manual PDFDocument104 pagesAde Lab Manual PDFnishuNo ratings yet
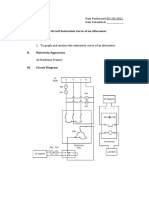
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- Masuma Mam Lab 4 & 5Document8 pagesMasuma Mam Lab 4 & 5Md. HarunNo ratings yet
- 2 Machine LabDocument4 pages2 Machine LabManoj GuptaNo ratings yet
- Channel Synchronous Step-Down DC/DC Converter IC: Ew ProductsDocument4 pagesChannel Synchronous Step-Down DC/DC Converter IC: Ew ProductsEndang SuhendarNo ratings yet
- Turn Ratio of 1 Phase XFDocument3 pagesTurn Ratio of 1 Phase XFtusarNo ratings yet
- Machines1 Exp 5Document6 pagesMachines1 Exp 5Lover BoyNo ratings yet
- Power Electronics Lab Assignment AC-DC-DC-1-3Document4 pagesPower Electronics Lab Assignment AC-DC-DC-1-3Arife AbdulkerimNo ratings yet
- EC Lab Manual (08.407)Document101 pagesEC Lab Manual (08.407)Assini HussainNo ratings yet
- Experiment 1 Op-Amps and Basics of Signal ConditioningDocument6 pagesExperiment 1 Op-Amps and Basics of Signal ConditioningAnonymous XZUyueNNo ratings yet
- VDR and CDRDocument3 pagesVDR and CDRYashNo ratings yet
- Power Electronics Lab Assignment-IV: Simulation of Full Wave Uncontrolled Ac-Dc ConverterDocument7 pagesPower Electronics Lab Assignment-IV: Simulation of Full Wave Uncontrolled Ac-Dc ConverterAurang ZaibNo ratings yet
- Lab 2 Basic CMOS AmplifiersDocument5 pagesLab 2 Basic CMOS AmplifiersJatinKumarNo ratings yet
- Laboratory Workbook: NAME: Vishnuvardhan S ROLL NO:19BMC209Document5 pagesLaboratory Workbook: NAME: Vishnuvardhan S ROLL NO:19BMC209VishnuvardhanNo ratings yet
- Lab 02 Operational Amplifier (MA23134)Document7 pagesLab 02 Operational Amplifier (MA23134)marzuqimarissaNo ratings yet
- LT SpiceDocument6 pagesLT SpiceVijay Preetham100% (1)
- Power Electronics Lab Assignment-III: Simulation of Half Wave Uncontrolled Ac-Dc ConverterDocument8 pagesPower Electronics Lab Assignment-III: Simulation of Half Wave Uncontrolled Ac-Dc ConverterAurang ZaibNo ratings yet
- 2018 Lab 5B Voltage-Controlled - OscillatorDocument4 pages2018 Lab 5B Voltage-Controlled - OscillatorPatrick SibandaNo ratings yet
- Kirchhoff ReportDocument10 pagesKirchhoff ReportGeorge RYNo ratings yet
- Faculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Document7 pagesFaculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Rameshkumar JayaramanNo ratings yet
- Lab Manual STDocument68 pagesLab Manual STAlex MutiuNo ratings yet
- Larning Objectives: Lab 2: Introduction To Matlab/ Psim Simulation Applied To Half-Wave RectifierDocument8 pagesLarning Objectives: Lab 2: Introduction To Matlab/ Psim Simulation Applied To Half-Wave RectifierMO 'No ratings yet
- Dar Es Salaam Institute of Technology: Department: Module CodeDocument14 pagesDar Es Salaam Institute of Technology: Department: Module CodeSokoine Hamad DenisNo ratings yet
- LT366 Demo ManualDocument8 pagesLT366 Demo ManualParasaram SrinivasNo ratings yet
- Dac 0800 & Dac 0802 (An 1525)Document4 pagesDac 0800 & Dac 0802 (An 1525)HARICH90No ratings yet
- Chapter 3 - Operational Amplifiers: Experiment 3.1 - Inverter AmplifierDocument44 pagesChapter 3 - Operational Amplifiers: Experiment 3.1 - Inverter AmplifierIshaku BalamiNo ratings yet
- Kartik PeDocument4 pagesKartik Pekartikeya kannaNo ratings yet
- Lab Experiment 2Document5 pagesLab Experiment 2Ahmet IçelNo ratings yet
- Exp 6Document6 pagesExp 6NUR AQILAH AMIRAH AIDILNo ratings yet
- Electronics System: Lab. Session 3: Electrical ActuatorsDocument8 pagesElectronics System: Lab. Session 3: Electrical ActuatorsMarti SoucheironNo ratings yet
- Buck ConvertersDocument15 pagesBuck Convertersmuddassir07100% (2)
- DC Transient Analysis Using SimulationDocument6 pagesDC Transient Analysis Using SimulationJanani RangarajanNo ratings yet
- 2.2 ZZG32系列整流模块使用说明书 (无框) V1.00 2015-12-2中英译文20210831Document15 pages2.2 ZZG32系列整流模块使用说明书 (无框) V1.00 2015-12-2中英译文202108318fb6k9dphpNo ratings yet
- DP70 Analog Output Manual EngDocument17 pagesDP70 Analog Output Manual EngphucgenjiNo ratings yet
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Document6 pagesExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaNo ratings yet
- The Operational AmplifierDocument35 pagesThe Operational Amplifierbbwx4114No ratings yet
- Institute of Space Technology Islamabad: Labno8Document7 pagesInstitute of Space Technology Islamabad: Labno8Mudasser ZiaNo ratings yet
- Lab7 ET150Document7 pagesLab7 ET150KMAAL AaNo ratings yet
- PEE492C Electrical Machines and Measurement LabDocument12 pagesPEE492C Electrical Machines and Measurement LabRaqib ChohdharyNo ratings yet
- Lab Report 2Document17 pagesLab Report 2aznia shireenNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Lesson 1 - Introduction - SIMULINKr1Document19 pagesLesson 1 - Introduction - SIMULINKr1Ye GuNo ratings yet
- Inline Functions and Plotting in MatlabDocument5 pagesInline Functions and Plotting in MatlabAnonymous o9av7ANo ratings yet
- New Features and MigrationDocument34 pagesNew Features and MigrationtuyennddpsNo ratings yet
- A Major Project Report On Design of Multicomponent Distillation Column by Approximate and Rigorous Method Using MatlabDocument51 pagesA Major Project Report On Design of Multicomponent Distillation Column by Approximate and Rigorous Method Using MatlabMasood HassanNo ratings yet
- 1-2 Introduction To MATLAB (S)Document29 pages1-2 Introduction To MATLAB (S)wasifNo ratings yet
- LCS Lab1 Introduction of MatlabDocument14 pagesLCS Lab1 Introduction of MatlabMaaz khanNo ratings yet
- Using Adams/Controls - MD Adams 2010Document54 pagesUsing Adams/Controls - MD Adams 2010pkokatam100% (1)
- Image Classification Based On Fuzzy LogicDocument6 pagesImage Classification Based On Fuzzy LogicAmiliya EmilNo ratings yet
- PDF - Eeglab Wiki TutorialDocument253 pagesPDF - Eeglab Wiki TutorialAndrés Canales JohnsonNo ratings yet
- Teaching Plan (Machine Learning) : Programming ExercisesDocument2 pagesTeaching Plan (Machine Learning) : Programming ExercisesKishanNo ratings yet
- Introduction To MATLAB: Experiment IDocument4 pagesIntroduction To MATLAB: Experiment IArikJuniarNo ratings yet
- System Integration Effort On Magviz A Liquid Explosive Detection DeviceDocument3 pagesSystem Integration Effort On Magviz A Liquid Explosive Detection DevicethaoNo ratings yet
- Manual LiveROMSDocument22 pagesManual LiveROMSGubbler R. Otarola Bello100% (1)
- Matlab ManualDocument33 pagesMatlab ManualRicha MishraNo ratings yet
- COMSATS University Islamabad WAH CAMPUS Department of Computer ScienceDocument5 pagesCOMSATS University Islamabad WAH CAMPUS Department of Computer ScienceNamal NamalNo ratings yet
- IBM Enterprise-Getting Started With CPLEX PDFDocument255 pagesIBM Enterprise-Getting Started With CPLEX PDFLamchochiya Mahaan0% (1)
- Lab Exp 1Document16 pagesLab Exp 1NumanAbdullah100% (1)
- 2.1 The Basic Features: Matlab Notes Matlab 2 2. MatrixDocument7 pages2.1 The Basic Features: Matlab Notes Matlab 2 2. MatrixAbdul HakimNo ratings yet
- Interfacing Matlab and V-RepDocument10 pagesInterfacing Matlab and V-RepGoutham Mareeswaran BNo ratings yet
- D Space InstallDocument52 pagesD Space InstallprinceoshilaluNo ratings yet
- Matlab NN ToolboxDocument18 pagesMatlab NN Toolboxnilton_9365611No ratings yet
- Python For Lecture V05Document41 pagesPython For Lecture V05Gerhard BrunthalerNo ratings yet
- ELEC6258 Simulation of Mobile Communications Matlab CourseworkDocument8 pagesELEC6258 Simulation of Mobile Communications Matlab CourseworkAsif Ahmed NeloyNo ratings yet
- 1234 Poor Seg To Mato PreDocument23 pages1234 Poor Seg To Mato PreTomNo ratings yet
- Lab 14Document5 pagesLab 14Mohsin IqbalNo ratings yet
- Tutorials On OpenCV and MatlabDocument29 pagesTutorials On OpenCV and MatlabKrishna VinayNo ratings yet
- Spike Sorting TutorialDocument25 pagesSpike Sorting Tutorialtiger05No ratings yet
- LAB No.3 - CN 428 - Spring 2022Document3 pagesLAB No.3 - CN 428 - Spring 2022NURSELI KURTNo ratings yet
- 2.4 GHZ TaskDocument17 pages2.4 GHZ TaskDARSHAN GNo ratings yet