Download as docx, pdf, or txt
You might also like
- NULA Check Code 2020Document6 pagesNULA Check Code 2020Linh Pham HoangNo ratings yet
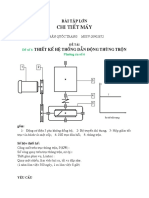
- Đồ Án Cánh Tay Robot PUMADocument27 pagesĐồ Án Cánh Tay Robot PUMAkentio100% (2)
- Wiper WasherDocument5 pagesWiper Washer20145618No ratings yet
- BÁO CÁO BÀI TẬP LỚN MÔN HỌC VI XỬ LÝDocument15 pagesBÁO CÁO BÀI TẬP LỚN MÔN HỌC VI XỬ LÝHoàng Mai Nguyễn100% (1)
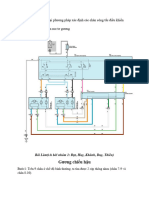
- Xác định và ghi lại phương pháp xác định các chân công tắc điều khiển gươngDocument13 pagesXác định và ghi lại phương pháp xác định các chân công tắc điều khiển gươngtiendatpham2017No ratings yet
- Hướng Dẫn Cài Đặt Màn Hình HMI Trên Đèn Giao ThôngDocument3 pagesHướng Dẫn Cài Đặt Màn Hình HMI Trên Đèn Giao Thôngnguyenanh.sale01No ratings yet
- Demo 3Document13 pagesDemo 3thanh võNo ratings yet
- Hệ thống nâng hạ kính xe ô tô conDocument7 pagesHệ thống nâng hạ kính xe ô tô con20145618No ratings yet
- Demo 2Document12 pagesDemo 2thanh võNo ratings yet
- M CH Xe Hyundai Accent 2018Document3 pagesM CH Xe Hyundai Accent 2018Lưu Lê Nguyên ĐạtNo ratings yet
- Báo Cáo Nhóm 1Document7 pagesBáo Cáo Nhóm 1cutedangte123No ratings yet
- Bài Giảng Hóa Đại Cương IDocument196 pagesBài Giảng Hóa Đại Cương IPhúc Bùi100% (1)
- Lap Trinh Robot Tu Dong Voi PIC16F877ADocument14 pagesLap Trinh Robot Tu Dong Voi PIC16F877ATruonglana100% (5)
- Bài 4Document4 pagesBài 4mrnokNo ratings yet
- Tự động hoá qua trình sản xuấtDocument5 pagesTự động hoá qua trình sản xuấtDINH TRUONG LENo ratings yet
- 18 Bai Tap Ting HopDocument8 pages18 Bai Tap Ting Hopkhoa.23y0136No ratings yet
- Lab 5 - Thuctap So 005 ThanhghiDocument20 pagesLab 5 - Thuctap So 005 ThanhghiHoang Dung SonNo ratings yet
- Hình ?: Đèn Xi Nhan Phía Sau Xe Ô TôDocument16 pagesHình ?: Đèn Xi Nhan Phía Sau Xe Ô TôthịnhNo ratings yet
- Báo Cáo TH CS Máy ĐiệnDocument26 pagesBáo Cáo TH CS Máy Điệnhungbachkhoa21No ratings yet
- Thuật toán FloydDocument2 pagesThuật toán Floydkinghazard2004No ratings yet
- Báo Cáo Robot ElbowDocument44 pagesBáo Cáo Robot ElbowNguyễn Đình Việt0% (1)
- Hệ thống gương chiếu hậuDocument5 pagesHệ thống gương chiếu hậuminh minhNo ratings yet
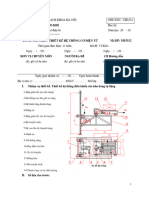
- Co-So-Thiet-Ke-May - Tran-Thien-Phuc - Bai-Tap-Lon-Chi-Tiet-May - Thiet-Ke-He-Thong-Dan-Dong-Thung-Tron - (Cuuduongthancong - Com)Document8 pagesCo-So-Thiet-Ke-May - Tran-Thien-Phuc - Bai-Tap-Lon-Chi-Tiet-May - Thiet-Ke-He-Thong-Dan-Dong-Thung-Tron - (Cuuduongthancong - Com)Bạch Quang TiếnNo ratings yet
- De Thi - HTDKN - HK2 - 1516Document1 pageDe Thi - HTDKN - HK2 - 1516Toan PhamNo ratings yet
- Tieu Luan Nhóm IiiDocument5 pagesTieu Luan Nhóm Iiihungchagia1No ratings yet
- hệ thống đèn tín hiệuDocument10 pageshệ thống đèn tín hiệu20145379No ratings yet
- Diep CaDocument6 pagesDiep CathonongdanNo ratings yet
- So Do Mach ABS Toyota lexus-ODB1Document7 pagesSo Do Mach ABS Toyota lexus-ODB1Toàn NguyễnNo ratings yet
- Báo cáo động cơ điện 1 chiềuDocument15 pagesBáo cáo động cơ điện 1 chiều20020569No ratings yet
- Bao-cao-thực-tập-số-2 thực tập điện ô tô 2Document11 pagesBao-cao-thực-tập-số-2 thực tập điện ô tô 2Phùng Viết NhậtNo ratings yet
- BÀI 8 - PHIẾU GIAO BÀI TẬP 1Document1 pageBÀI 8 - PHIẾU GIAO BÀI TẬP 1Vui AmiNo ratings yet
- Ứng dụng giải thuật bầy đàn để xác định thông số bộ PID trong điều khiển tốc độ động cơ không đồng bộ ba phaDocument6 pagesỨng dụng giải thuật bầy đàn để xác định thông số bộ PID trong điều khiển tốc độ động cơ không đồng bộ ba phapvdaiNo ratings yet
- Bệnh Án Chấn Thương ThiDocument7 pagesBệnh Án Chấn Thương ThiLinh LinhNo ratings yet
- Me5512-Đa TKHTCDT-CĐTTM 1.4mDocument14 pagesMe5512-Đa TKHTCDT-CĐTTM 1.4mLộc Phạm vănNo ratings yet
- The Lighting SystemDocument4 pagesThe Lighting SystemTruong Cong HuyNo ratings yet
- Đồ án tổng hợp hệ thống điện cơ - Nghiên cứu hệ điều khiển tốc độ động cơ không đồng bộ ba pha Roto lồng sóc bằng phương pháp điều khiển vecto tựa từ thông Roto (FOC) - 939894Document94 pagesĐồ án tổng hợp hệ thống điện cơ - Nghiên cứu hệ điều khiển tốc độ động cơ không đồng bộ ba pha Roto lồng sóc bằng phương pháp điều khiển vecto tựa từ thông Roto (FOC) - 939894Thang Le QuyetNo ratings yet
- Qgii08 HCDocument7 pagesQgii08 HCHoang Hai NguyenNo ratings yet
- BÀI KIỂM TRA THỰC HÀNH 01Document7 pagesBÀI KIỂM TRA THỰC HÀNH 01PK NguyênNo ratings yet
- Đe Tai Cuoi Ky - Final - 2 - 6Document8 pagesĐe Tai Cuoi Ky - Final - 2 - 6quangthanhlop10a9No ratings yet
- 01-66KOC2-Đậu Văn Thế AnhDocument14 pages01-66KOC2-Đậu Văn Thế AnhThế AnhNo ratings yet
- Báo Cáo CSĐKTĐDocument20 pagesBáo Cáo CSĐKTĐPhùng AnNo ratings yet
- BTL KTMTDocument11 pagesBTL KTMThiểu NguyễnNo ratings yet
- Chap 5Document14 pagesChap 5Hoang Dung SonNo ratings yet
- RNTLC: Cho: NTDocument9 pagesRNTLC: Cho: NTanhkhoidentrangNo ratings yet
- HỆ THỐNG NÂNG HẠ KÍNHDocument3 pagesHỆ THỐNG NÂNG HẠ KÍNH21145377No ratings yet
- Nghiên cứu phát triển hệ Robot tự hành có gắn camera tự động tìm kiếm và bám mục tiêu di độngDocument7 pagesNghiên cứu phát triển hệ Robot tự hành có gắn camera tự động tìm kiếm và bám mục tiêu di độngpvdaiNo ratings yet
- FPGA - Module TM1638 - SVDocument10 pagesFPGA - Module TM1638 - SVGia ThịnhNo ratings yet
- Câu hỏi ôn tap ctao oto mkDocument42 pagesCâu hỏi ôn tap ctao oto mknamdh22ckd01No ratings yet
- BAOCAOnhom4 HTDKNDocument95 pagesBAOCAOnhom4 HTDKNLê Đức TriệuNo ratings yet
- Doan Ly Thuyet OtoDocument15 pagesDoan Ly Thuyet Otoquanghai04022003No ratings yet
- Wiper WasherDocument5 pagesWiper Washer20145618No ratings yet
- Bao cao thực tập Nhóm 3.Document7 pagesBao cao thực tập Nhóm 3.20145618No ratings yet
- Hệ thống nâng hạ kính xe ô tô conDocument7 pagesHệ thống nâng hạ kính xe ô tô con20145618No ratings yet
- Nhập Môn Quản Trị HọcDocument17 pagesNhập Môn Quản Trị Học20145618No ratings yet