
03 - Lecture 03 Leaky Integrate ND Fire Model
03 - Lecture 03 Leaky Integrate ND Fire Model
You might also like
- SSS 7 Edition MANUAL The Analysis and Designs of Linear Circuit PDFDocument987 pagesSSS 7 Edition MANUAL The Analysis and Designs of Linear Circuit PDFEngr Azeem Awan100% (3)
- Electric Circuits 10th Edition Nilsson Solutions ManualDocument89 pagesElectric Circuits 10th Edition Nilsson Solutions ManualKimCoffeyjndf100% (45)
- Hart Solutions PDFDocument218 pagesHart Solutions PDFJunior Alvarenga100% (7)
- Solution Manual Power Electronics Daniel Hart 5 PDF FreeDocument8 pagesSolution Manual Power Electronics Daniel Hart 5 PDF FreeMuhammadIrsyadNo ratings yet
- Solution Manual Power Electronics Daniel PDFDocument8 pagesSolution Manual Power Electronics Daniel PDFDiogoArgentina0% (1)
- Power Electronics Daniel Hart Chapter 2 SolutionDocument77 pagesPower Electronics Daniel Hart Chapter 2 SolutionGökhan ŞENNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsAlexander AndersonNo ratings yet
- Problem 6.7Document20 pagesProblem 6.7EmmanuelDalesAlquizolaNo ratings yet
- 100 Relay DevicesDocument14 pages100 Relay DevicesKian TecsonNo ratings yet
- LCM 500 Presentation - 2Document55 pagesLCM 500 Presentation - 2baoHVLAB100% (9)
- Islamic University of Technology (Iut) : Course: Experiment No Name of The ExperimentDocument3 pagesIslamic University of Technology (Iut) : Course: Experiment No Name of The ExperimentshiamNo ratings yet
- L19b VVDocument37 pagesL19b VVpallavk369No ratings yet
- Response of First-Order RL and RC Circuits: Assessment ProblemsDocument87 pagesResponse of First-Order RL and RC Circuits: Assessment ProblemsHung NguyênNo ratings yet
- ch07 Ism PDFDocument95 pagesch07 Ism PDFSebastian Mora OyarzunNo ratings yet
- Ebook Electric Circuits 10Th Edition Nilsson Solutions Manual Full Chapter PDFDocument68 pagesEbook Electric Circuits 10Th Edition Nilsson Solutions Manual Full Chapter PDFalexandercampbelldkcnzafgtw100% (12)
- Today:: QT V Itr CDocument8 pagesToday:: QT V Itr CAbdul MuhaiminNo ratings yet
- HW 1 Solutions 472 F18Document4 pagesHW 1 Solutions 472 F18Mahesh vangaraNo ratings yet
- Lecture #4 AC Power Analysis PDFDocument66 pagesLecture #4 AC Power Analysis PDFClifford TejaNo ratings yet
- 12th Jee Em+Gm Ac, EmwDocument91 pages12th Jee Em+Gm Ac, EmwEeea EearNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (137-143)Document7 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (137-143)mjd rNo ratings yet
- Memristors 31 40Document10 pagesMemristors 31 40Tamas ZefferNo ratings yet
- AC CircuitsDocument25 pagesAC CircuitsJhon HarrisonNo ratings yet
- Chapter07 - Unit IV - Alternating Current - Part FileDocument20 pagesChapter07 - Unit IV - Alternating Current - Part FileBijoy KangjamNo ratings yet
- AC Circuits Upto ParallelDocument95 pagesAC Circuits Upto ParallelSantosh PrajapatiNo ratings yet
- LN (1 - (VC/VO) ) VS T: Tiempo de Descarga Del Condensador (S)Document2 pagesLN (1 - (VC/VO) ) VS T: Tiempo de Descarga Del Condensador (S)Gian Carlo Rojas AlbornozNo ratings yet
- 7 AC Current & VoltageDocument40 pages7 AC Current & VoltageThaslim ThaslimNo ratings yet
- Dr. Abdullah M. Elsayed: Department of Electrical Engineering Damietta University - EgyptDocument64 pagesDr. Abdullah M. Elsayed: Department of Electrical Engineering Damietta University - EgyptStephenNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesgopalgeniusNo ratings yet
- Lecture 3 AC CircuitsDocument122 pagesLecture 3 AC CircuitsPatrick mumbaNo ratings yet
- Eca 1 ProblemsDocument15 pagesEca 1 ProblemsAhmed SohailNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesRizwan AliNo ratings yet
- Chapter 1 SolutionsDocument8 pagesChapter 1 Solutionsعبدالرحمن محمد جاسم حمودNo ratings yet
- Ass 3Document3 pagesAss 3DevashishSinghNo ratings yet
- Chapter 7 CircuitDocument89 pagesChapter 7 Circuitsiran3025No ratings yet
- Alternating Current TheoryDocument7 pagesAlternating Current TheoryYash MehraNo ratings yet
- ECE204 - AC Circuits Review For Test 1Document3 pagesECE204 - AC Circuits Review For Test 1porplemontageNo ratings yet
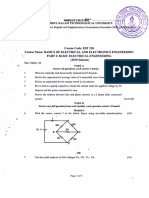
- Est 130 Basics of Electrical and Electronics Engineering, December 2020Document3 pagesEst 130 Basics of Electrical and Electronics Engineering, December 2020GOURI KRISHNANo ratings yet
- Lecture 02 - Chap 2 Basic ConceptsDocument30 pagesLecture 02 - Chap 2 Basic ConceptsHabes NoraNo ratings yet
- 2 - Chapter 1Document11 pages2 - Chapter 1AhmedNo ratings yet
- RC Circuit - 2019Document3 pagesRC Circuit - 2019thanhtoan2901No ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsAnanna TithiNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsbasharfarhanNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsFatima AlBishtawiNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsNelson Andres Entralgo MaldonadoNo ratings yet
- Solution Manual Power Electronics Daniel Hart 5 PDF FreeDocument8 pagesSolution Manual Power Electronics Daniel Hart 5 PDF FreeOmer MarquezNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsLEE KAR OON A17MJ00560% (1)
- Solution Manual Power Electronics Daniel Hart 5 PDF FreeDocument8 pagesSolution Manual Power Electronics Daniel Hart 5 PDF FreeDavid Uribe100% (1)
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsIouseMichLaraNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsKevin Carpio0% (1)
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsJaimeNo ratings yet
- QP DEC 2020Document3 pagesQP DEC 2020jeffy bobyNo ratings yet
- Ehsan Elahi Su-20-02-048-012Document15 pagesEhsan Elahi Su-20-02-048-012M Xubair Yousaf XaiNo ratings yet
- Experiment - 1 AIM: To Plot The Characteristic Curve Between Current and Time, Voltage andDocument25 pagesExperiment - 1 AIM: To Plot The Characteristic Curve Between Current and Time, Voltage andPurukapoorNo ratings yet
- Chapter 15 - Rectilinear MotionDocument54 pagesChapter 15 - Rectilinear MotionAbdallah KabalanNo ratings yet
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanNo ratings yet
- Topics Covered On Last Class:: Alternating CircuitDocument37 pagesTopics Covered On Last Class:: Alternating CircuitFariha ShahrinNo ratings yet
- Alternating Current RL Circuits: 1 ObjectivesDocument7 pagesAlternating Current RL Circuits: 1 ObjectivesElliott M.No ratings yet
- Theoretical Neuroscience - Assignment 1: 1 The Hodgkin-Huxley NeuronDocument8 pagesTheoretical Neuroscience - Assignment 1: 1 The Hodgkin-Huxley NeuronAsyliumNo ratings yet
- CapacitorDocument2 pagesCapacitorsreekantha reddyNo ratings yet
- CAPE U2 LAB#10 Azariah BarrettDocument7 pagesCAPE U2 LAB#10 Azariah BarrettazaribarrNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- CM 09 MaupertuisDocument3 pagesCM 09 Maupertuisosama hasanNo ratings yet
- CM 27 Eulers EquationsDocument5 pagesCM 27 Eulers Equationsosama hasanNo ratings yet
- CM 23 Rigid Body MotionDocument11 pagesCM 23 Rigid Body Motionosama hasanNo ratings yet
- CM 25 Rigid Body Moving FreelyDocument4 pagesCM 25 Rigid Body Moving Freelyosama hasanNo ratings yet
- CM 13 Adiabatic Invt Actn AnglDocument7 pagesCM 13 Adiabatic Invt Actn Anglosama hasanNo ratings yet
- CM 12 Hamilton JacobiDocument6 pagesCM 12 Hamilton Jacobiosama hasanNo ratings yet
- LL2 Sec 15Document12 pagesLL2 Sec 15osama hasanNo ratings yet
- CM 24 Moments of InertiaDocument5 pagesCM 24 Moments of Inertiaosama hasanNo ratings yet
- CM 28 Non Inertial Frame CoriolisDocument6 pagesCM 28 Non Inertial Frame Coriolisosama hasanNo ratings yet
- Linear Regression. ExamplesDocument6 pagesLinear Regression. Examplesosama hasanNo ratings yet
- LL2 Sec 4Document23 pagesLL2 Sec 4osama hasanNo ratings yet
- Hrvoje Nikolić 2007 J. Phys. - Conf. Ser. 67 012035Document7 pagesHrvoje Nikolić 2007 J. Phys. - Conf. Ser. 67 012035osama hasanNo ratings yet
- LL2 Sec 25Document15 pagesLL2 Sec 25osama hasanNo ratings yet
- Positive and Negative Effects of Mobile PhoneDocument2 pagesPositive and Negative Effects of Mobile Phoneosama hasanNo ratings yet
- Chapter9 StatDocument28 pagesChapter9 Statosama hasanNo ratings yet
- Brown Thesis - PDFQ CountingDocument225 pagesBrown Thesis - PDFQ Countingosama hasanNo ratings yet
- MAT330 Lecture Notes - PDF Complx - An.Document143 pagesMAT330 Lecture Notes - PDF Complx - An.osama hasanNo ratings yet
- PfaDocument6 pagesPfababitasharmaNo ratings yet
- Two Marks Questions Mechatronics (MH1031) Unit - 1Document12 pagesTwo Marks Questions Mechatronics (MH1031) Unit - 1cakejhNo ratings yet
- Fdocuments - in Hybrid MotorcycleDocument28 pagesFdocuments - in Hybrid MotorcycleAyush PunNo ratings yet
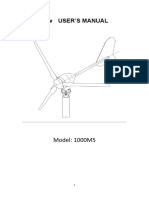
- 1KW Horizontal Users ManualDocument17 pages1KW Horizontal Users ManualSean SmithNo ratings yet
- Implementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationDocument8 pagesImplementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationArun raj DharamsuthNo ratings yet
- Motorola Taps PDFDocument10 pagesMotorola Taps PDFJuan ZapataNo ratings yet
- FYP Final ReportDocument40 pagesFYP Final ReportYouwan LeeNo ratings yet
- Freq1St - Underfrequency or Overfrequency Protection Stages 1, 2, 3, 4 and 5Document18 pagesFreq1St - Underfrequency or Overfrequency Protection Stages 1, 2, 3, 4 and 5rajeshNo ratings yet
- Tunnel DiodeDocument5 pagesTunnel DiodeKiran PandeyNo ratings yet
- Varec Data SheetDocument2 pagesVarec Data SheetferminNo ratings yet
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product Summaryserrano.flia.coNo ratings yet
- SolarEdge 100A CT Sensor Install GuideDocument3 pagesSolarEdge 100A CT Sensor Install GuideAzeddine AISSAOUINo ratings yet
- Selection of Cables/ConductorsDocument37 pagesSelection of Cables/ConductorsshuwingNo ratings yet
- TM Inverter Systems and Motors - 04-2008Document655 pagesTM Inverter Systems and Motors - 04-2008brainz2use86% (7)
- Biquad Antenna ConstructionDocument7 pagesBiquad Antenna ConstructionLlodiam OrtizNo ratings yet
- (RFD9910) Common Base Amplifier Linearization Using AugmentationDocument3 pages(RFD9910) Common Base Amplifier Linearization Using AugmentationAnwar ZainuddinNo ratings yet
- Assam Power Distribution Company Limited: NoticeDocument2 pagesAssam Power Distribution Company Limited: NoticePallab BaruahNo ratings yet
- Electronic Circuits Unit-1Document31 pagesElectronic Circuits Unit-1Siddhasen PatilNo ratings yet
- Service Manual OK Toshiba Dvr80kfDocument123 pagesService Manual OK Toshiba Dvr80kfGfr FrnNo ratings yet
- OptiX RTN 900 V1R1 Installation Guide-VDFDocument40 pagesOptiX RTN 900 V1R1 Installation Guide-VDFsrasool_2No ratings yet
- Crown Ma 2402Document2 pagesCrown Ma 2402金屬尾No ratings yet
- 30GXDocument34 pages30GXmatrix lunarNo ratings yet
- AD633Document20 pagesAD633zampradeepNo ratings yet
- A Review Paper On CMOS, SOI and FinFET TechnologyDocument12 pagesA Review Paper On CMOS, SOI and FinFET Technologyરાહુલ મેહ્તાNo ratings yet
- WILO Cat Heizung Klima KaelteDocument505 pagesWILO Cat Heizung Klima KaeltecosmynnsNo ratings yet
- Installation of Current Limiting Reactors in Esp: - Monday, June 07, 2021Document15 pagesInstallation of Current Limiting Reactors in Esp: - Monday, June 07, 2021srmohapatra5086No ratings yet
- Coulombs Law CH21Document21 pagesCoulombs Law CH21Ruben CondeNo ratings yet






































































































Download as pdf or txt
You might also like
- SSS 7 Edition MANUAL The Analysis and Designs of Linear Circuit PDFDocument987 pagesSSS 7 Edition MANUAL The Analysis and Designs of Linear Circuit PDFEngr Azeem Awan100% (3)
- Electric Circuits 10th Edition Nilsson Solutions ManualDocument89 pagesElectric Circuits 10th Edition Nilsson Solutions ManualKimCoffeyjndf100% (45)
- Hart Solutions PDFDocument218 pagesHart Solutions PDFJunior Alvarenga100% (7)
- Solution Manual Power Electronics Daniel Hart 5 PDF FreeDocument8 pagesSolution Manual Power Electronics Daniel Hart 5 PDF FreeMuhammadIrsyadNo ratings yet
- Solution Manual Power Electronics Daniel PDFDocument8 pagesSolution Manual Power Electronics Daniel PDFDiogoArgentina0% (1)
- Power Electronics Daniel Hart Chapter 2 SolutionDocument77 pagesPower Electronics Daniel Hart Chapter 2 SolutionGökhan ŞENNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsAlexander AndersonNo ratings yet
- Problem 6.7Document20 pagesProblem 6.7EmmanuelDalesAlquizolaNo ratings yet
- 100 Relay DevicesDocument14 pages100 Relay DevicesKian TecsonNo ratings yet
- LCM 500 Presentation - 2Document55 pagesLCM 500 Presentation - 2baoHVLAB100% (9)
- Islamic University of Technology (Iut) : Course: Experiment No Name of The ExperimentDocument3 pagesIslamic University of Technology (Iut) : Course: Experiment No Name of The ExperimentshiamNo ratings yet
- L19b VVDocument37 pagesL19b VVpallavk369No ratings yet
- Response of First-Order RL and RC Circuits: Assessment ProblemsDocument87 pagesResponse of First-Order RL and RC Circuits: Assessment ProblemsHung NguyênNo ratings yet
- ch07 Ism PDFDocument95 pagesch07 Ism PDFSebastian Mora OyarzunNo ratings yet
- Ebook Electric Circuits 10Th Edition Nilsson Solutions Manual Full Chapter PDFDocument68 pagesEbook Electric Circuits 10Th Edition Nilsson Solutions Manual Full Chapter PDFalexandercampbelldkcnzafgtw100% (12)
- Today:: QT V Itr CDocument8 pagesToday:: QT V Itr CAbdul MuhaiminNo ratings yet
- HW 1 Solutions 472 F18Document4 pagesHW 1 Solutions 472 F18Mahesh vangaraNo ratings yet
- Lecture #4 AC Power Analysis PDFDocument66 pagesLecture #4 AC Power Analysis PDFClifford TejaNo ratings yet
- 12th Jee Em+Gm Ac, EmwDocument91 pages12th Jee Em+Gm Ac, EmwEeea EearNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (137-143)Document7 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (137-143)mjd rNo ratings yet
- Memristors 31 40Document10 pagesMemristors 31 40Tamas ZefferNo ratings yet
- AC CircuitsDocument25 pagesAC CircuitsJhon HarrisonNo ratings yet
- Chapter07 - Unit IV - Alternating Current - Part FileDocument20 pagesChapter07 - Unit IV - Alternating Current - Part FileBijoy KangjamNo ratings yet
- AC Circuits Upto ParallelDocument95 pagesAC Circuits Upto ParallelSantosh PrajapatiNo ratings yet
- LN (1 - (VC/VO) ) VS T: Tiempo de Descarga Del Condensador (S)Document2 pagesLN (1 - (VC/VO) ) VS T: Tiempo de Descarga Del Condensador (S)Gian Carlo Rojas AlbornozNo ratings yet
- 7 AC Current & VoltageDocument40 pages7 AC Current & VoltageThaslim ThaslimNo ratings yet
- Dr. Abdullah M. Elsayed: Department of Electrical Engineering Damietta University - EgyptDocument64 pagesDr. Abdullah M. Elsayed: Department of Electrical Engineering Damietta University - EgyptStephenNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesgopalgeniusNo ratings yet
- Lecture 3 AC CircuitsDocument122 pagesLecture 3 AC CircuitsPatrick mumbaNo ratings yet
- Eca 1 ProblemsDocument15 pagesEca 1 ProblemsAhmed SohailNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesRizwan AliNo ratings yet
- Chapter 1 SolutionsDocument8 pagesChapter 1 Solutionsعبدالرحمن محمد جاسم حمودNo ratings yet
- Ass 3Document3 pagesAss 3DevashishSinghNo ratings yet
- Chapter 7 CircuitDocument89 pagesChapter 7 Circuitsiran3025No ratings yet
- Alternating Current TheoryDocument7 pagesAlternating Current TheoryYash MehraNo ratings yet
- ECE204 - AC Circuits Review For Test 1Document3 pagesECE204 - AC Circuits Review For Test 1porplemontageNo ratings yet
- Est 130 Basics of Electrical and Electronics Engineering, December 2020Document3 pagesEst 130 Basics of Electrical and Electronics Engineering, December 2020GOURI KRISHNANo ratings yet
- Lecture 02 - Chap 2 Basic ConceptsDocument30 pagesLecture 02 - Chap 2 Basic ConceptsHabes NoraNo ratings yet
- 2 - Chapter 1Document11 pages2 - Chapter 1AhmedNo ratings yet
- RC Circuit - 2019Document3 pagesRC Circuit - 2019thanhtoan2901No ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsAnanna TithiNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsbasharfarhanNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsFatima AlBishtawiNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsNelson Andres Entralgo MaldonadoNo ratings yet
- Solution Manual Power Electronics Daniel Hart 5 PDF FreeDocument8 pagesSolution Manual Power Electronics Daniel Hart 5 PDF FreeOmer MarquezNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsLEE KAR OON A17MJ00560% (1)
- Solution Manual Power Electronics Daniel Hart 5 PDF FreeDocument8 pagesSolution Manual Power Electronics Daniel Hart 5 PDF FreeDavid Uribe100% (1)
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsIouseMichLaraNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsKevin Carpio0% (1)
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsJaimeNo ratings yet
- QP DEC 2020Document3 pagesQP DEC 2020jeffy bobyNo ratings yet
- Ehsan Elahi Su-20-02-048-012Document15 pagesEhsan Elahi Su-20-02-048-012M Xubair Yousaf XaiNo ratings yet
- Experiment - 1 AIM: To Plot The Characteristic Curve Between Current and Time, Voltage andDocument25 pagesExperiment - 1 AIM: To Plot The Characteristic Curve Between Current and Time, Voltage andPurukapoorNo ratings yet
- Chapter 15 - Rectilinear MotionDocument54 pagesChapter 15 - Rectilinear MotionAbdallah KabalanNo ratings yet
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanNo ratings yet
- Topics Covered On Last Class:: Alternating CircuitDocument37 pagesTopics Covered On Last Class:: Alternating CircuitFariha ShahrinNo ratings yet
- Alternating Current RL Circuits: 1 ObjectivesDocument7 pagesAlternating Current RL Circuits: 1 ObjectivesElliott M.No ratings yet
- Theoretical Neuroscience - Assignment 1: 1 The Hodgkin-Huxley NeuronDocument8 pagesTheoretical Neuroscience - Assignment 1: 1 The Hodgkin-Huxley NeuronAsyliumNo ratings yet
- CapacitorDocument2 pagesCapacitorsreekantha reddyNo ratings yet
- CAPE U2 LAB#10 Azariah BarrettDocument7 pagesCAPE U2 LAB#10 Azariah BarrettazaribarrNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- CM 09 MaupertuisDocument3 pagesCM 09 Maupertuisosama hasanNo ratings yet
- CM 27 Eulers EquationsDocument5 pagesCM 27 Eulers Equationsosama hasanNo ratings yet
- CM 23 Rigid Body MotionDocument11 pagesCM 23 Rigid Body Motionosama hasanNo ratings yet
- CM 25 Rigid Body Moving FreelyDocument4 pagesCM 25 Rigid Body Moving Freelyosama hasanNo ratings yet
- CM 13 Adiabatic Invt Actn AnglDocument7 pagesCM 13 Adiabatic Invt Actn Anglosama hasanNo ratings yet
- CM 12 Hamilton JacobiDocument6 pagesCM 12 Hamilton Jacobiosama hasanNo ratings yet
- LL2 Sec 15Document12 pagesLL2 Sec 15osama hasanNo ratings yet
- CM 24 Moments of InertiaDocument5 pagesCM 24 Moments of Inertiaosama hasanNo ratings yet
- CM 28 Non Inertial Frame CoriolisDocument6 pagesCM 28 Non Inertial Frame Coriolisosama hasanNo ratings yet
- Linear Regression. ExamplesDocument6 pagesLinear Regression. Examplesosama hasanNo ratings yet
- LL2 Sec 4Document23 pagesLL2 Sec 4osama hasanNo ratings yet
- Hrvoje Nikolić 2007 J. Phys. - Conf. Ser. 67 012035Document7 pagesHrvoje Nikolić 2007 J. Phys. - Conf. Ser. 67 012035osama hasanNo ratings yet
- LL2 Sec 25Document15 pagesLL2 Sec 25osama hasanNo ratings yet
- Positive and Negative Effects of Mobile PhoneDocument2 pagesPositive and Negative Effects of Mobile Phoneosama hasanNo ratings yet
- Chapter9 StatDocument28 pagesChapter9 Statosama hasanNo ratings yet
- Brown Thesis - PDFQ CountingDocument225 pagesBrown Thesis - PDFQ Countingosama hasanNo ratings yet
- MAT330 Lecture Notes - PDF Complx - An.Document143 pagesMAT330 Lecture Notes - PDF Complx - An.osama hasanNo ratings yet
- PfaDocument6 pagesPfababitasharmaNo ratings yet
- Two Marks Questions Mechatronics (MH1031) Unit - 1Document12 pagesTwo Marks Questions Mechatronics (MH1031) Unit - 1cakejhNo ratings yet
- Fdocuments - in Hybrid MotorcycleDocument28 pagesFdocuments - in Hybrid MotorcycleAyush PunNo ratings yet
- 1KW Horizontal Users ManualDocument17 pages1KW Horizontal Users ManualSean SmithNo ratings yet
- Implementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationDocument8 pagesImplementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationArun raj DharamsuthNo ratings yet
- Motorola Taps PDFDocument10 pagesMotorola Taps PDFJuan ZapataNo ratings yet
- FYP Final ReportDocument40 pagesFYP Final ReportYouwan LeeNo ratings yet
- Freq1St - Underfrequency or Overfrequency Protection Stages 1, 2, 3, 4 and 5Document18 pagesFreq1St - Underfrequency or Overfrequency Protection Stages 1, 2, 3, 4 and 5rajeshNo ratings yet
- Tunnel DiodeDocument5 pagesTunnel DiodeKiran PandeyNo ratings yet
- Varec Data SheetDocument2 pagesVarec Data SheetferminNo ratings yet
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product Summaryserrano.flia.coNo ratings yet
- SolarEdge 100A CT Sensor Install GuideDocument3 pagesSolarEdge 100A CT Sensor Install GuideAzeddine AISSAOUINo ratings yet
- Selection of Cables/ConductorsDocument37 pagesSelection of Cables/ConductorsshuwingNo ratings yet
- TM Inverter Systems and Motors - 04-2008Document655 pagesTM Inverter Systems and Motors - 04-2008brainz2use86% (7)
- Biquad Antenna ConstructionDocument7 pagesBiquad Antenna ConstructionLlodiam OrtizNo ratings yet
- (RFD9910) Common Base Amplifier Linearization Using AugmentationDocument3 pages(RFD9910) Common Base Amplifier Linearization Using AugmentationAnwar ZainuddinNo ratings yet
- Assam Power Distribution Company Limited: NoticeDocument2 pagesAssam Power Distribution Company Limited: NoticePallab BaruahNo ratings yet
- Electronic Circuits Unit-1Document31 pagesElectronic Circuits Unit-1Siddhasen PatilNo ratings yet
- Service Manual OK Toshiba Dvr80kfDocument123 pagesService Manual OK Toshiba Dvr80kfGfr FrnNo ratings yet
- OptiX RTN 900 V1R1 Installation Guide-VDFDocument40 pagesOptiX RTN 900 V1R1 Installation Guide-VDFsrasool_2No ratings yet
- Crown Ma 2402Document2 pagesCrown Ma 2402金屬尾No ratings yet
- 30GXDocument34 pages30GXmatrix lunarNo ratings yet
- AD633Document20 pagesAD633zampradeepNo ratings yet
- A Review Paper On CMOS, SOI and FinFET TechnologyDocument12 pagesA Review Paper On CMOS, SOI and FinFET Technologyરાહુલ મેહ્તાNo ratings yet
- WILO Cat Heizung Klima KaelteDocument505 pagesWILO Cat Heizung Klima KaeltecosmynnsNo ratings yet
- Installation of Current Limiting Reactors in Esp: - Monday, June 07, 2021Document15 pagesInstallation of Current Limiting Reactors in Esp: - Monday, June 07, 2021srmohapatra5086No ratings yet
- Coulombs Law CH21Document21 pagesCoulombs Law CH21Ruben CondeNo ratings yet