Download as pdf or txt
You might also like
- Wind Energy Preparation 06 Aerodynamics QuizDocument10 pagesWind Energy Preparation 06 Aerodynamics QuizPedro Galvani67% (9)
- Flutter Matlab Codes PDFDocument8 pagesFlutter Matlab Codes PDFcrimelife6No ratings yet
- Multilayer PerceptronDocument11 pagesMultilayer PerceptronDesya EspriliaNo ratings yet
- Neumoinsuflador Lut Service ManualDocument65 pagesNeumoinsuflador Lut Service Manualandres2013bio0% (1)
- Exp 5Document8 pagesExp 5alamin shawonNo ratings yet
- EEE 412 Experiment 5Document8 pagesEEE 412 Experiment 5alamin shawonNo ratings yet
- Código em MATLAB 6Document4 pagesCódigo em MATLAB 6SOST HUMAPNo ratings yet
- Código em MATLAB 5Document6 pagesCódigo em MATLAB 5SOST HUMAPNo ratings yet
- Código em MATLAB 2Document8 pagesCódigo em MATLAB 2SOST HUMAPNo ratings yet
- Código em MATLAB 1Document8 pagesCódigo em MATLAB 1SOST HUMAPNo ratings yet
- Damping SystemDocument6 pagesDamping SystemEro DoppleganggerNo ratings yet
- Código em MATLAB 4Document6 pagesCódigo em MATLAB 4SOST HUMAPNo ratings yet
- Código em MATLAB 4Document4 pagesCódigo em MATLAB 4SOST HUMAPNo ratings yet
- MatlabDocument25 pagesMatlabMuhammad TayyabNo ratings yet
- Report For Numerical Techniques AssignmentsDocument18 pagesReport For Numerical Techniques Assignments朱宇No ratings yet
- Assignment 5 Phase AngleDocument5 pagesAssignment 5 Phase AngleMuhammad TayyabNo ratings yet
- VLSI Lab 9Document33 pagesVLSI Lab 9Umar AyubNo ratings yet
- Rep Sol 1701687561892Document11 pagesRep Sol 1701687561892satwikNo ratings yet
- Codigo FinalDocument3 pagesCodigo FinalSantiago Salas MontielNo ratings yet
- EE462 Lab Assignement 1Document14 pagesEE462 Lab Assignement 1Terry rickyNo ratings yet
- SM CHDocument111 pagesSM CHJonathanNo ratings yet
- Experiment No: 13 Transient and Steady State Response AnalysisDocument28 pagesExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNo ratings yet
- 380 Power Systems Electromagnetic Transients SimulationDocument14 pages380 Power Systems Electromagnetic Transients SimulationkjfenNo ratings yet
- Rafi Arya Pramana - Kuis OOSTDocument6 pagesRafi Arya Pramana - Kuis OOSTAenurhaq IqbalNo ratings yet
- A Instrument Landing System AccountingDocument13 pagesA Instrument Landing System AccountingvasudhaaaaaNo ratings yet
- All All: Main - Ident.mDocument10 pagesAll All: Main - Ident.mAndrés Santiago AriasNo ratings yet
- Verilog Prep MaterialDocument11 pagesVerilog Prep MaterialSangeetha BajanthriNo ratings yet
- K-Value CalculatorDocument2 pagesK-Value CalculatorEric HeNo ratings yet
- Faculty of EngineeringDocument7 pagesFaculty of EngineeringHậu LêNo ratings yet
- Full Text 21Document9 pagesFull Text 21SatishReddyNo ratings yet
- MikroC Final RetoDocument3 pagesMikroC Final RetoSantiago Salas MontielNo ratings yet
- Appendices: Appendix A: Complete BEM CodeDocument12 pagesAppendices: Appendix A: Complete BEM CodeJohn KerryNo ratings yet
- Cognitive Radio System: 1. Square-Root Raised Cosinefilter User Define FunctionDocument8 pagesCognitive Radio System: 1. Square-Root Raised Cosinefilter User Define FunctionsurvivalofthepolyNo ratings yet
- Lecture On Advanced Mathematical TechnquesDocument39 pagesLecture On Advanced Mathematical TechnquesDebayan GuptaNo ratings yet
- Nirkeen YolDocument8 pagesNirkeen YolnikrooNo ratings yet
- Pontificia Universidad Católica Del Chile: Magister en Ingenieria Estructural Y GeotecnicaDocument24 pagesPontificia Universidad Católica Del Chile: Magister en Ingenieria Estructural Y GeotecnicaNicolas AhumadaNo ratings yet
- Assignment No. 01Document14 pagesAssignment No. 01DEBOJYOTI SAHANo ratings yet
- 8/4/15 2:29 PM C:/Users/Indul... /pmu - For - Publicuse - Setup.M 1 of 3Document3 pages8/4/15 2:29 PM C:/Users/Indul... /pmu - For - Publicuse - Setup.M 1 of 3indula123No ratings yet
- Assignment No: 1 Statement: Write Down The Matlab Program For Falling Parachutist CaseDocument4 pagesAssignment No: 1 Statement: Write Down The Matlab Program For Falling Parachutist CaseAkshay WalimbeNo ratings yet
- Fourier Series Example: Matlab CodeDocument2 pagesFourier Series Example: Matlab Codeuamiranda3518No ratings yet
- Deenbandhu Chhotu Ram University of Science and Technology, Murthal, SonepatDocument10 pagesDeenbandhu Chhotu Ram University of Science and Technology, Murthal, Sonepatdeepika vermaNo ratings yet
- Assignment 3Document17 pagesAssignment 3firaol temesgenNo ratings yet
- Assignment No: 1: Statement: Write Down The Matlab Program For Falling Parachutist CaseDocument3 pagesAssignment No: 1: Statement: Write Down The Matlab Program For Falling Parachutist CaseAkshay WalimbeNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionssudarshan poojaryNo ratings yet
- Practica04 MaquinaSincronica EspinozaMarcos ScriptDocument7 pagesPractica04 MaquinaSincronica EspinozaMarcos ScriptMarcos EspinozaNo ratings yet
- Performance Comparison NOMA - OFDMDocument3 pagesPerformance Comparison NOMA - OFDMfekadu100% (1)
- Matlab CodeDocument2 pagesMatlab Codejtran23618No ratings yet
- 'Enter The Initial Guess For The Temparature: ' '': FunctionDocument6 pages'Enter The Initial Guess For The Temparature: ' '': FunctionSanket ShahNo ratings yet
- DSP ReportDocument31 pagesDSP Reportrefat01754433564No ratings yet
- Práctica 1 MarqDocument7 pagesPráctica 1 MarqMasturbanda BattlesNo ratings yet
- Matlab Code:: All All LongDocument2 pagesMatlab Code:: All All LongSantosh KumarNo ratings yet
- Nama: Muhammad Farhan Supriatna NIM: D1021191054 Mata Kuliah: Perancangan Berbantuan KomputerDocument2 pagesNama: Muhammad Farhan Supriatna NIM: D1021191054 Mata Kuliah: Perancangan Berbantuan KomputerFarhan Kemal23No ratings yet
- Period Tracking Using Autocorrelation - DadorranDocument7 pagesPeriod Tracking Using Autocorrelation - DadorranGustavo Trigueiros IINo ratings yet
- Papr MDocument7 pagesPapr MasfsfsadsaNo ratings yet
- 35 Muhammad TayyabDocument30 pages35 Muhammad TayyabMuhammad TayyabNo ratings yet
- Adaptive Control Theory: Direct Self-Tuning Regulators and Internal ModelDocument27 pagesAdaptive Control Theory: Direct Self-Tuning Regulators and Internal ModelThanh NguyenNo ratings yet
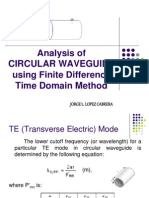
- Circular Waveguide Microwave Engineering ProjectDocument19 pagesCircular Waveguide Microwave Engineering ProjectGouse ModeenNo ratings yet
- ImplementationDocument14 pagesImplementationTamilSelvanNo ratings yet
- CodesDocument13 pagesCodesshak543No ratings yet
- For If Elseif Elseif Elseif Else End For Elseif Else End: %here Are The Motor ParametersDocument1 pageFor If Elseif Elseif Elseif Else End For Elseif Else End: %here Are The Motor ParametersEhab Mostafa MareiNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Zlib - Pub Thevenin Eee Job Guideline For Assistant Engineer Buet MSCDocument503 pagesZlib - Pub Thevenin Eee Job Guideline For Assistant Engineer Buet MSCalamin shawonNo ratings yet
- দ্য_কেয়ারিং_ওয়াইফ_মোঃ_মতিউর_রহমান_৮৩Document83 pagesদ্য_কেয়ারিং_ওয়াইফ_মোঃ_মতিউর_রহমান_৮৩alamin shawonNo ratings yet
- ISI and Pulse Shaping MathDocument14 pagesISI and Pulse Shaping Mathalamin shawonNo ratings yet
- B Section Channel Coding SolveDocument9 pagesB Section Channel Coding Solvealamin shawonNo ratings yet
- Thesis PresentatrionDocument41 pagesThesis Presentatrionalamin shawonNo ratings yet
- PDF For DigsilentDocument100 pagesPDF For Digsilentalamin shawonNo ratings yet
- SUGGESTIONSDocument2 pagesSUGGESTIONSalamin shawonNo ratings yet
- Exp 5Document8 pagesExp 5alamin shawonNo ratings yet
- ProjectDocument3 pagesProjectalamin shawonNo ratings yet
- Xenon Arc Exposure Test With Enhanced Light and Water Exposure For Transportation CoatingsDocument10 pagesXenon Arc Exposure Test With Enhanced Light and Water Exposure For Transportation Coatingso_l_0No ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityvasava dipakNo ratings yet
- SeminarDocument29 pagesSeminarAkash shindeNo ratings yet
- Ztable 2Document4 pagesZtable 2Yosua SiregarNo ratings yet
- Personal Workbook For Breaking The Chain of Low Self EsteemDocument308 pagesPersonal Workbook For Breaking The Chain of Low Self EsteemPragyan Nanda100% (1)
- MC Practicals 2Document12 pagesMC Practicals 2Adi AdnanNo ratings yet
- Make Up TT23Document1 pageMake Up TT23ShreyasNo ratings yet
- Computed Radiography (CR) : Dosen: Anak Agung Aris Diartama, S.ST, M.TR - IDDocument28 pagesComputed Radiography (CR) : Dosen: Anak Agung Aris Diartama, S.ST, M.TR - IDKevin TagahNo ratings yet
- FormDocument83 pagesFormAnimesh SinghNo ratings yet
- Installation and Operation Manual: VRV IV+ Heat Pump For High Ambient TemperaturesDocument44 pagesInstallation and Operation Manual: VRV IV+ Heat Pump For High Ambient Temperaturesahmadgce04No ratings yet
- Macbeth Lesson PlanDocument2 pagesMacbeth Lesson Planrymahoney10No ratings yet
- Sika RainTiteDocument2 pagesSika RainTiteRialno TambunanNo ratings yet
- Declaration of Conformity For Restriction of Hazardous Substances (Rohs)Document1 pageDeclaration of Conformity For Restriction of Hazardous Substances (Rohs)Yogesh KatyarmalNo ratings yet
- File DisksDocument22 pagesFile DisksAlana PetersonNo ratings yet
- Carbon Dioxide CO2 SensorDocument4 pagesCarbon Dioxide CO2 SensorgouttNo ratings yet
- Floating Boat Library-Mini Project-1Document37 pagesFloating Boat Library-Mini Project-1parmayadav56789No ratings yet
- Product 043 UMDocument31 pagesProduct 043 UMPankaj MauryaNo ratings yet
- Hindalco ReportDocument42 pagesHindalco ReportAman RoyNo ratings yet
- DS IV Unit NotesDocument29 pagesDS IV Unit NotesAlagandula KalyaniNo ratings yet
- Vietnam SPC - Vinyl Price ListDocument9 pagesVietnam SPC - Vinyl Price ListThe Cultural CommitteeNo ratings yet
- Chapter 6Document24 pagesChapter 6گل میوہNo ratings yet
- Cut Out ValveDocument64 pagesCut Out ValveHoang L A TuanNo ratings yet
- Regresi OrdinalDocument3 pagesRegresi Ordinalwahyuni salsabilaNo ratings yet
- Cable Gland HAWKER - CatalogueDocument87 pagesCable Gland HAWKER - CatalogueJean SantosNo ratings yet
- Cooling TowerDocument2 pagesCooling TowerLance Darren GalorportNo ratings yet
- LOPC-mech Seal FailureDocument26 pagesLOPC-mech Seal FailureSanjeevi Kumar SpNo ratings yet
- How To Read A Dji Terra Quality ReportDocument10 pagesHow To Read A Dji Terra Quality ReportRazvan Julian PetrescuNo ratings yet
- Take Away Material SYFC - September 2022Document11 pagesTake Away Material SYFC - September 2022Akun TumbalNo ratings yet