Download as pdf or txt
You might also like
- Statistics Sample ProblemDocument2 pagesStatistics Sample Problemlucas0% (1)
- Numerical Descriptive Measures: A. Measures of Central TendencyDocument21 pagesNumerical Descriptive Measures: A. Measures of Central TendencybonjourNo ratings yet
- Unit 5-Two MarksDocument4 pagesUnit 5-Two MarkslokeshnathNo ratings yet
- Analysis of Variance-Two Way ClassificationDocument4 pagesAnalysis of Variance-Two Way Classificationpounise2000No ratings yet
- Analysis of Variance-Two Way ClassificationDocument4 pagesAnalysis of Variance-Two Way Classificationsri harsha namburiNo ratings yet
- Anova 2 Way With ReplicationDocument32 pagesAnova 2 Way With ReplicationArdian FitriyantoNo ratings yet
- 9a-ANOVA MMWDocument3 pages9a-ANOVA MMWPrincess Essa LamelaNo ratings yet
- ANOVADocument13 pagesANOVA20-CMB-01 Mudasir ShabirNo ratings yet
- Application of ANOVADocument18 pagesApplication of ANOVAKunwar Aditya100% (1)
- 1.6.2 RCBD (Hale) - Supp ReadingDocument13 pages1.6.2 RCBD (Hale) - Supp ReadingTeflon SlimNo ratings yet
- ANOVADocument2 pagesANOVASheryl Mae GantalaoNo ratings yet
- Analysisi of VarianceDocument7 pagesAnalysisi of VarianceEsamul HaqNo ratings yet
- Topic6 ReadingDocument13 pagesTopic6 ReadingJeannetteNo ratings yet
- FEM 3004 - Lab 8 - 24.12.20Document35 pagesFEM 3004 - Lab 8 - 24.12.20AINA NADHIRAH BINTI A ROZEY / UPMNo ratings yet
- Multivariate RegressionDocument20 pagesMultivariate RegressionFun Toosh345No ratings yet
- An OvaDocument11 pagesAn Ovadekdek1No ratings yet
- Basic Maths FormulaDocument9 pagesBasic Maths FormulaAtharva 74No ratings yet
- SUMMARY of ANOVADocument2 pagesSUMMARY of ANOVAcram colasitoNo ratings yet
- Topic 6. Randomized Complete Block Design (RCBD)Document20 pagesTopic 6. Randomized Complete Block Design (RCBD)Teflon SlimNo ratings yet
- CH 12Document108 pagesCH 12김여명No ratings yet
- 12 - Analysis of Variance 28042022 050411pm PDFDocument43 pages12 - Analysis of Variance 28042022 050411pm PDFnaveed yousafNo ratings yet
- Session 15 - ANOVADocument39 pagesSession 15 - ANOVAjeevanboda.738No ratings yet
- AYJR 2022 (Advanced) - Paper 2 - MathonGoDocument48 pagesAYJR 2022 (Advanced) - Paper 2 - MathonGoupendra nagarNo ratings yet
- Latin Square Design: ModelDocument5 pagesLatin Square Design: ModelRaShika RashiNo ratings yet
- Analysis of Variance Analysis of Variance: Steps For One Way ClassificationDocument2 pagesAnalysis of Variance Analysis of Variance: Steps For One Way ClassificationNathaniel EsguerraNo ratings yet
- Chapter 2 - Lecture 2 - AnnotatedDocument62 pagesChapter 2 - Lecture 2 - AnnotatedAhmed TamerNo ratings yet
- Rohini 65690336567Document5 pagesRohini 65690336567pavipathma0922No ratings yet
- Fisher Linear Discriminant Analysis: Max WellingDocument4 pagesFisher Linear Discriminant Analysis: Max WellingRandy LinNo ratings yet
- CBP Exam Formula Sheet 2015Document4 pagesCBP Exam Formula Sheet 2015Luca HarainiNo ratings yet
- A Nova Analysis of VarianceDocument22 pagesA Nova Analysis of Variancejibinjohn140No ratings yet
- Electron Correlation Methods: HF HF CDocument22 pagesElectron Correlation Methods: HF HF Cjohn doeNo ratings yet
- Three-Dimensional Field Structure in Open Unstable Resonators Part I: Passive Cavity ResultsDocument12 pagesThree-Dimensional Field Structure in Open Unstable Resonators Part I: Passive Cavity Resultsz.umul9031No ratings yet
- Dr. Saad Elsayed: Electric Communication Systems (3) ELC 411Document29 pagesDr. Saad Elsayed: Electric Communication Systems (3) ELC 411Esraa HamadaNo ratings yet
- Anova Table: Factorial Experiment Completely Randomized DesignDocument42 pagesAnova Table: Factorial Experiment Completely Randomized DesignMae SyNo ratings yet
- لقطة شاشة ٢٠٢٤-٠٥-١٠ في ١٠.٠١.٥٩ مDocument36 pagesلقطة شاشة ٢٠٢٤-٠٥-١٠ في ١٠.٠١.٥٩ مrefal714No ratings yet
- Anova Two WayDocument35 pagesAnova Two WaysakshitaNo ratings yet
- Lect8 PDFDocument20 pagesLect8 PDFEsamul HaqNo ratings yet
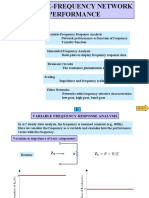
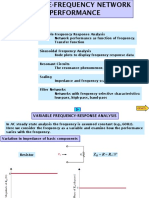
- Ch12 VariableFrequencyResponseAnalysis8EdDocument105 pagesCh12 VariableFrequencyResponseAnalysis8EdThinh Nguyen TanNo ratings yet
- Cepa 742Document6 pagesCepa 742Mujeeb Ul RehmanNo ratings yet
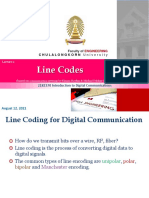
- Lecture 3 Line Coding August 2021-224-16613038795585Document38 pagesLecture 3 Line Coding August 2021-224-16613038795585Kunakorn LeelahakumakornNo ratings yet
- L3 3 97 WebDocument14 pagesL3 3 97 WebMahak YadavNo ratings yet
- ECE 461/561-001: Communication Systems Design: Min MaxDocument5 pagesECE 461/561-001: Communication Systems Design: Min MaxZhenyu HuoNo ratings yet
- Linear Equalizers & Nonlinear Equalizers: Prepared by Deepa.T, Asst - Prof. /TCEDocument36 pagesLinear Equalizers & Nonlinear Equalizers: Prepared by Deepa.T, Asst - Prof. /TCESantosh Kumar Ganji ECE GNITCNo ratings yet
- Half Life Tsay NotesDocument25 pagesHalf Life Tsay NotesjezNo ratings yet
- Chapter 3-Part 2 - Angle ModulationDocument34 pagesChapter 3-Part 2 - Angle Modulationyohans shegawNo ratings yet
- Minimum Shift KeyingDocument29 pagesMinimum Shift KeyingVedansh BeniwalNo ratings yet
- Variable Frequency NW AnalysisDocument35 pagesVariable Frequency NW AnalysisEngr. Afshan ishaq Electronics ABTNo ratings yet
- Anova & Significant DifferenceDocument3 pagesAnova & Significant DifferenceSheryl Mae GantalaoNo ratings yet
- Sodium D-Line Splitting PDFDocument5 pagesSodium D-Line Splitting PDFvibhav sharmaNo ratings yet
- Reading 11: Correlation and Simple Regression: Calculate and Interpret The FollowingDocument15 pagesReading 11: Correlation and Simple Regression: Calculate and Interpret The FollowingACarringtonNo ratings yet
- 20 - ECE 3125 ECE 3242 - Dec 17 2012 - Bandpass Signalling - (4b)Document16 pages20 - ECE 3125 ECE 3242 - Dec 17 2012 - Bandpass Signalling - (4b)Eng-Ahmed ShabellNo ratings yet
- "MSC"="SSC" / 〖 "df" 〗 - 𝑐𝑜𝑙𝑢𝑚𝑛𝑠 "MSE"= ("SS" 𝐸) / 〖 "df" 〗 - 𝑒𝑟𝑟𝑜𝑟 𝐹="MSC" /"MSE"Document2 pages"MSC"="SSC" / 〖 "df" 〗 - 𝑐𝑜𝑙𝑢𝑚𝑛𝑠 "MSE"= ("SS" 𝐸) / 〖 "df" 〗 - 𝑒𝑟𝑟𝑜𝑟 𝐹="MSC" /"MSE"HarshNo ratings yet
- Advancechem Q1 LP4Document7 pagesAdvancechem Q1 LP4Francesca BuenoNo ratings yet
- Periodograms and Blackman-Tukey Spectral Estimation: - ObjectivesDocument11 pagesPeriodograms and Blackman-Tukey Spectral Estimation: - ObjectivesrakeshNo ratings yet
- Wavelength of Sodium Light Using Diffraction GrattingDocument4 pagesWavelength of Sodium Light Using Diffraction GrattingINSIF ElectronicsNo ratings yet
- 3.2.2 DSB-SC (Double Side Band - Suppressed Carrier) : OdulationDocument4 pages3.2.2 DSB-SC (Double Side Band - Suppressed Carrier) : Odulationprojects allNo ratings yet
- Determination of The Resolving Power of A TelescopeDocument5 pagesDetermination of The Resolving Power of A TelescopePrashant KoreNo ratings yet
- Revission of StatisticsDocument3 pagesRevission of StatisticsTazeem OmerNo ratings yet
- Unit Iv Design of ExperimentsDocument34 pagesUnit Iv Design of ExperimentsMathioli Senthil0% (1)
- Tables RequiredDocument7 pagesTables Requiredvima210421No ratings yet
- Unit I 2marksDocument8 pagesUnit I 2marksvima210421No ratings yet
- SNM Question Bank 1Document3 pagesSNM Question Bank 1vima210421No ratings yet
- Latin Square DesignDocument6 pagesLatin Square Designvima210421No ratings yet
- SNM Unit III Lecture NotesDocument29 pagesSNM Unit III Lecture Notesvima210421No ratings yet
- Elec2200 4 PDFDocument16 pagesElec2200 4 PDFRomel Taga-amoNo ratings yet
- Inverse Converse ContrapositiveDocument4 pagesInverse Converse ContrapositiveChristian Alcantara MarselioNo ratings yet
- Chapter 1 LogicDocument29 pagesChapter 1 LogicZumygui JorgeNo ratings yet
- Workshop: Modus Pollens Modus Tollens ( (B' (A - ) ) A')Document1 pageWorkshop: Modus Pollens Modus Tollens ( (B' (A - ) ) A')Avanindra Kumar PandeyaNo ratings yet
- Module 10 Math 103Document4 pagesModule 10 Math 103ビゲイル マリアアNo ratings yet
- Inroduction To ZDocument10 pagesInroduction To ZCYBER GAMINGNo ratings yet
- 4.1 Extreme Values of FunctionsDocument7 pages4.1 Extreme Values of FunctionsJacob BeanNo ratings yet
- Informed SearchDocument13 pagesInformed SearchSaksham kumarNo ratings yet
- MMW Lesson 4Document25 pagesMMW Lesson 4Eva France TangonanNo ratings yet
- Week 01 (The Foundations Logic and Proofs)Document28 pagesWeek 01 (The Foundations Logic and Proofs)Gulfam HanifNo ratings yet
- Daa Syllabus 2021Document2 pagesDaa Syllabus 2021Sagar LabadeNo ratings yet
- Class DiagramDocument1 pageClass DiagramAlhasan A. RayyanNo ratings yet
- Discrete Mathematics: Songphon Klabwong Rajamangala University of Technology ThanyaburiDocument12 pagesDiscrete Mathematics: Songphon Klabwong Rajamangala University of Technology ThanyaburiSongphon CsrmuttNo ratings yet
- Inverse, Exponential, and Logarithmic Functions: Not For SaleDocument92 pagesInverse, Exponential, and Logarithmic Functions: Not For SaleCrystal RobleNo ratings yet
- Gen Math - q2 - Week 7 - Module 7 - Logic - For ReproductionDocument24 pagesGen Math - q2 - Week 7 - Module 7 - Logic - For ReproductionAlex Albarando Saraosos0% (1)
- Types of SetsDocument1 pageTypes of SetsJerel John CalanaoNo ratings yet
- Lambdas LabDocument2 pagesLambdas Labalmahmoud92No ratings yet
- HW9 Solution To RoydenDocument5 pagesHW9 Solution To RoydenChase Harrow50% (2)
- AI MCQ QUESTION 100 MCQDocument13 pagesAI MCQ QUESTION 100 MCQdrphysics256No ratings yet
- Volterra Integral EquationsDocument14 pagesVolterra Integral Equationsneda gossiliNo ratings yet
- Sets G7Document24 pagesSets G7Allah Rizza MarquesesNo ratings yet
- Aditya Engineering College (A) : Unit-VDocument11 pagesAditya Engineering College (A) : Unit-Vgayathri yerukondaNo ratings yet
- MMW Midterm Exam - Google FormsDocument20 pagesMMW Midterm Exam - Google FormsCheryll PagalNo ratings yet
- IntrodutionDocument34 pagesIntrodutionaymaneNo ratings yet
- Group Theory Fiaz HussainDocument15 pagesGroup Theory Fiaz HussainManish ShettyNo ratings yet
- StackDocument14 pagesStackayushtiwari10c11897No ratings yet
- Properties of Context-Free Languages: Decision Properties Closure PropertiesDocument35 pagesProperties of Context-Free Languages: Decision Properties Closure PropertiesLalalalalalaNo ratings yet
- Lab - QuestionsDocument5 pagesLab - Questionsvinothananthini18No ratings yet
- Lecture 07Document27 pagesLecture 07Walid ZerradNo ratings yet
- Assignment 1Document2 pagesAssignment 1yash kalalNo ratings yet