Download as pdf or txt
You might also like
- AWS Architect5Document1 pageAWS Architect5Alexander KarunaNo ratings yet
- Decoupling MethodologyDocument39 pagesDecoupling Methodologyahzhun2000100% (1)
- Constructing Sobol Sequences With Better Two-Dimensional ProjectionsDocument20 pagesConstructing Sobol Sequences With Better Two-Dimensional ProjectionsA BNo ratings yet
- 341 SyllabusDocument5 pages341 SyllabusBenjaminNo ratings yet
- A Coupled Microstripline Directional Coupler Simulated Using CST-MWSDocument10 pagesA Coupled Microstripline Directional Coupler Simulated Using CST-MWSDenis CarlosNo ratings yet
- Equations of A Synchronous Machine in Phase Coordinates For Asymmetrical Short Circuits and Their SolutionsDocument11 pagesEquations of A Synchronous Machine in Phase Coordinates For Asymmetrical Short Circuits and Their SolutionsPriyanka KilaniyaNo ratings yet
- A Mixed-Fidelity Numerical Study For Fan-Distortion InteractionDocument11 pagesA Mixed-Fidelity Numerical Study For Fan-Distortion InteractionNguyễn Đức HuyNo ratings yet
- IMG - 0034 PSME Code 2008 23Document1 pageIMG - 0034 PSME Code 2008 23Hnqr584hNo ratings yet
- STATSDocument1 pageSTATS2121anjalisNo ratings yet
- AutocorrelationDocument8 pagesAutocorrelationmia farrowNo ratings yet
- ERC Poster 2007Document1 pageERC Poster 2007api-3706706No ratings yet
- B. Sc. Special Honours Degree/ Diploma in Information TechnologyDocument5 pagesB. Sc. Special Honours Degree/ Diploma in Information TechnologyHarshagayan90No ratings yet
- Schneider 2012Document7 pagesSchneider 2012Jorge MarroquinNo ratings yet
- Captulo 9 Irwin Nona EdioDocument14 pagesCaptulo 9 Irwin Nona EdioÁlvaro PalmaNo ratings yet
- FindeR - Accelerating FM Index Based Exact Pattern Matching in Genomic Sequences Through ReRAM TechnologyDocument12 pagesFindeR - Accelerating FM Index Based Exact Pattern Matching in Genomic Sequences Through ReRAM Technology莊昆霖No ratings yet
- REDocument1 pageREyashamansrivastava23No ratings yet
- 2-1980-Free and Forced Vibration of CloselyDocument7 pages2-1980-Free and Forced Vibration of Closelymortazavi.technicalNo ratings yet
- PVP2020-21089 Efficient Fatigue and Ratcheting ComputationDocument7 pagesPVP2020-21089 Efficient Fatigue and Ratcheting Computationnahla0helmyNo ratings yet
- Computer Implementation of An Optimal Conformal Mapping For Gear Tooth Stress AnalysisDocument9 pagesComputer Implementation of An Optimal Conformal Mapping For Gear Tooth Stress Analysisభుక్య వెంకటేష్No ratings yet
- Unit-IV Transistor Biasing PDFDocument27 pagesUnit-IV Transistor Biasing PDFSridevi Women's Engineering College Department of EIENo ratings yet
- AWS Ac Ra Filesync 08 PDFDocument1 pageAWS Ac Ra Filesync 08 PDFRahul VNo ratings yet
- AWS Ac Ra Batch 03Document1 pageAWS Ac Ra Batch 03sashank7No ratings yet
- Enhancing Resilience Level of Power Distribution Systems Using Proactive Operational ActionsDocument13 pagesEnhancing Resilience Level of Power Distribution Systems Using Proactive Operational ActionsChakib BenamarNo ratings yet
- Accelerating Edge AI With Morpher: An Integrated Design, Compilation and Simulation Framework For CgrasDocument5 pagesAccelerating Edge AI With Morpher: An Integrated Design, Compilation and Simulation Framework For CgrasGJNo ratings yet
- Differentiating and Integrating ZX Diagrams: Quanlong Wang Richie Yeung Cambridge QuantumDocument32 pagesDifferentiating and Integrating ZX Diagrams: Quanlong Wang Richie Yeung Cambridge QuantumMarcus UrruhNo ratings yet
- Latness Based Control of A Line Conditioner For A Single Phase Ac SystemDocument5 pagesLatness Based Control of A Line Conditioner For A Single Phase Ac SystemAndré Lima CitadinNo ratings yet
- StataDocument6 pagesStatajdjdjdjdkNo ratings yet
- Cheat Sheet: With StataDocument6 pagesCheat Sheet: With StataSaiganesh RameshNo ratings yet
- Motor Power Control WhitepaperDocument15 pagesMotor Power Control WhitepaperCarlos ManríquezNo ratings yet
- MATLAB Motor Power Control WhitepaperDocument15 pagesMATLAB Motor Power Control WhitepaperMarcelo Lorenc100% (1)
- Analyzing Bevel Gear Damage Prediction Over Operating LifeDocument3 pagesAnalyzing Bevel Gear Damage Prediction Over Operating LifesaurabhNo ratings yet
- Paper RC ServomotorDocument6 pagesPaper RC Servomotorabc1000No ratings yet
- 1 s2.0 S0143974X09003009 Main PDFDocument7 pages1 s2.0 S0143974X09003009 Main PDFAISHWARYANo ratings yet
- Neural Network Based Estimation OF Feedback Signals For A Vector Controlled Induction Motor DriveDocument9 pagesNeural Network Based Estimation OF Feedback Signals For A Vector Controlled Induction Motor DrivesamNo ratings yet
- Winding 2Document6 pagesWinding 2jae hak kimNo ratings yet
- Compel 2015 7236460Document8 pagesCompel 2015 7236460salemg82No ratings yet
- Quantum MechanicsDocument13 pagesQuantum Mechanicsanju r sethuNo ratings yet
- Design and Modeling of The Photonic Crystal WaveguDocument12 pagesDesign and Modeling of The Photonic Crystal WaveguHữu Nam NguyễnNo ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- MATLAB-Based Programs For Power System Dynamic Analysis: Ismael AbdulrahmanDocument11 pagesMATLAB-Based Programs For Power System Dynamic Analysis: Ismael AbdulrahmansumathyNo ratings yet
- Stat A Cheat SheetsDocument6 pagesStat A Cheat SheetsivanmrnNo ratings yet
- MTO Drainage Manual Sept 30 2014 TutorialDocument44 pagesMTO Drainage Manual Sept 30 2014 TutorialDotan NutodNo ratings yet
- m2 PDFDocument8 pagesm2 PDFVaishnavi HMNo ratings yet
- Motor Sizing Calculations PDFDocument9 pagesMotor Sizing Calculations PDFGaleano CesarNo ratings yet
- Rinaldo Gonzalez CMMI 2011 FinalDocument2 pagesRinaldo Gonzalez CMMI 2011 FinalStephany CamacaroNo ratings yet
- Incremental Algorithms For Closeness CentralityDocument6 pagesIncremental Algorithms For Closeness CentralityArdiansyah SNo ratings yet
- Real-Time Three-Phase Line Loss Calculation For Distribution Network Based On Electric Characteristic Measuring TerminalDocument6 pagesReal-Time Three-Phase Line Loss Calculation For Distribution Network Based On Electric Characteristic Measuring TerminalNikko MontoyaNo ratings yet
- 12.THE EFFECT OF BURDEN ON THE ACCURACY OF INSTRUMENT TRANSFORMER - Deepen Sharma PDFDocument1 page12.THE EFFECT OF BURDEN ON THE ACCURACY OF INSTRUMENT TRANSFORMER - Deepen Sharma PDFKuenley TiNy OndeNo ratings yet
- Hydrology Conventional Problems PyqDocument25 pagesHydrology Conventional Problems PyqSunny KumarNo ratings yet
- AWS Ac Ra Web 01 PDFDocument1 pageAWS Ac Ra Web 01 PDFFranko Bravo100% (1)
- Design and Optimization of Single Phase Tubular Switched ReluctanceDocument6 pagesDesign and Optimization of Single Phase Tubular Switched ReluctanceEmrah KapukayaNo ratings yet
- Gearshift Systems and Synchronizati On: at The Threshold of MechatronicsDocument9 pagesGearshift Systems and Synchronizati On: at The Threshold of MechatronicsSunil AundhekarNo ratings yet
- Flowcom eDocument6 pagesFlowcom eWojciech DługoszNo ratings yet
- Analysis and Control of A DC Electric Drive Exhibiting Dead Zone CharacteristicsDocument4 pagesAnalysis and Control of A DC Electric Drive Exhibiting Dead Zone CharacteristicsWILLIAM BERRIOS ROJASNo ratings yet
- L-4/T-lIEEE Date: 07/12/2014: Section-ADocument42 pagesL-4/T-lIEEE Date: 07/12/2014: Section-AHolloGramNo ratings yet
- Design of Drag-Link Mechanisms With Optimum Transmission AngleDocument5 pagesDesign of Drag-Link Mechanisms With Optimum Transmission AngleNigussie AdemNo ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- CCF01009Document3 pagesCCF010092022ht80586No ratings yet
- MT3D-0113LSM-2-GaAs MMIC T3 Mixer With Differential IFDocument18 pagesMT3D-0113LSM-2-GaAs MMIC T3 Mixer With Differential IF2022ht80586No ratings yet
- Hall TicketDocument2 pagesHall Ticket2022ht80586No ratings yet
- Problem StatementDocument3 pagesProblem Statement2022ht80586No ratings yet
- Hso G Accredited Medical ClinicsDocument4 pagesHso G Accredited Medical ClinicsMarlowe SarabiaNo ratings yet
- 8463 PVM2701 2703 en SDocument4 pages8463 PVM2701 2703 en SAusaf AhmedNo ratings yet
- Power Quality Improvement at Nonlinear Loads UsingDocument14 pagesPower Quality Improvement at Nonlinear Loads UsingSuresh SrinivasanNo ratings yet
- Form 3 Chapter 7Document15 pagesForm 3 Chapter 7yooga palanisamyNo ratings yet
- D9412GV3 Series Quick Installation Guide EnUS 9007201746701067Document28 pagesD9412GV3 Series Quick Installation Guide EnUS 9007201746701067Carlos DavidNo ratings yet
- SPC HardwareDocument64 pagesSPC HardwareMatiasNo ratings yet
- ASUS K43E (Diagramas - Com.br) PDFDocument37 pagesASUS K43E (Diagramas - Com.br) PDFjoseadairNo ratings yet
- Thyristor Family PDFDocument20 pagesThyristor Family PDFMONU BHARMAN100% (1)
- Substation DC Auxiliary Supply Battery and Charger ApplicationsDocument6 pagesSubstation DC Auxiliary Supply Battery and Charger ApplicationsRoberto AlissonNo ratings yet
- Ep Question To PasteDocument10 pagesEp Question To PasteRajamanikandanNo ratings yet
- 160 00-RP8Document24 pages160 00-RP8Mosleh AbdelkaderNo ratings yet
- TC7660H High Frequency 7660 Dc-To-Dc Voltage Converter: Features General DescriptionDocument8 pagesTC7660H High Frequency 7660 Dc-To-Dc Voltage Converter: Features General Descriptionhanh_12No ratings yet
- Tested by M/S Siemens Organized by M/S Emc Witnessed by M/S Pgcil Name G Ramesh Designation SignatureDocument2 pagesTested by M/S Siemens Organized by M/S Emc Witnessed by M/S Pgcil Name G Ramesh Designation SignatureRK KNo ratings yet
- Low-Cd Cigs Solar Cells Made With A Hybrid CDS/ZN (O, S) Buffer LayerDocument6 pagesLow-Cd Cigs Solar Cells Made With A Hybrid CDS/ZN (O, S) Buffer LayerLastnaitoNo ratings yet
- SM-5000 Om Eng Eag02x104Document8 pagesSM-5000 Om Eng Eag02x104Chino PaciaNo ratings yet
- Sharp Lc-60-70le745u C7450u Le845u C8470u Le847uDocument86 pagesSharp Lc-60-70le745u C7450u Le845u C8470u Le847uDan PrewittNo ratings yet
- 600 - 0034 - 00 IntercomDocument4 pages600 - 0034 - 00 IntercomAdrian TodeaNo ratings yet
- Bis3201 Strategic Management of Information SystemsDocument1 pageBis3201 Strategic Management of Information SystemsIbra SaidNo ratings yet
- Ds LIFEBOOK U9413Document8 pagesDs LIFEBOOK U9413Bau FroschNo ratings yet
- GA Drawing For General DB (RAK-AV)Document2 pagesGA Drawing For General DB (RAK-AV)Shameem AhamedNo ratings yet
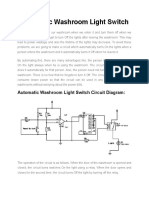
- BAtch 5 - Automatic Washroom Light SwitchDocument2 pagesBAtch 5 - Automatic Washroom Light Switchrajapandiya50% (2)
- DELTA NC300 M EN 20130419 HighDocument138 pagesDELTA NC300 M EN 20130419 HighImam SyaefudinNo ratings yet
- MISR 2018 Vol 2 EDocument244 pagesMISR 2018 Vol 2 EJuan Carlos AcostaNo ratings yet
- Kluwer Academic PublishersDocument822 pagesKluwer Academic PublishersАртем ШалевNo ratings yet
- Communication Protocol X-Line V3.7Document38 pagesCommunication Protocol X-Line V3.7cesarjaramilloudeNo ratings yet
- Physics Lab ReportDocument3 pagesPhysics Lab ReportRey Malvin SG PallominaNo ratings yet
- Solution Manual For "Wireless Communications" by A. F. MolischDocument5 pagesSolution Manual For "Wireless Communications" by A. F. MolischkazduzarNo ratings yet
- Automatic Garbage Collecting Van Using GSMDocument6 pagesAutomatic Garbage Collecting Van Using GSMSRL MECHNo ratings yet
- WVCP 470Document12 pagesWVCP 470gnormaNo ratings yet
- 12V Battery Level Indicator CircuitDocument27 pages12V Battery Level Indicator Circuitjayris2060049No ratings yet