Download as pdf or txt
You might also like
- SHG Mitsubishi - lehy-II C-1 - enDocument24 pagesSHG Mitsubishi - lehy-II C-1 - enEri Wanto SihombingNo ratings yet
- RIPMWC 2019-2021 SolutionsDocument15 pagesRIPMWC 2019-2021 SolutionsMarilyn CitadelNo ratings yet
- Sheet 3 - PLC Programming Ladder DiagramsDocument5 pagesSheet 3 - PLC Programming Ladder DiagramsEsmail MahmoudNo ratings yet
- PLC ExercisesDocument28 pagesPLC ExercisesMohamed Amine100% (1)
- PLC Training AssignmentsDocument2 pagesPLC Training Assignmentsnehal100% (1)
- Manual PRO CEA6 - INDocument76 pagesManual PRO CEA6 - INMamadou djibril Ba100% (2)
- Load SensorDocument11 pagesLoad Sensorabdul100% (2)
- Pozitioner Analogic AVIDDocument14 pagesPozitioner Analogic AVIDPop-Coman Simion100% (2)
- Sample Complaint For Sum of MoneyDocument4 pagesSample Complaint For Sum of MoneyRob Avenida100% (1)
- Academic3 PDFDocument216 pagesAcademic3 PDFAnthony AguirreNo ratings yet
- Boq For Box CulvertDocument2 pagesBoq For Box CulvertDaniel Okere100% (1)
- 2-SFC EnonceDocument11 pages2-SFC EnonceLuc AusterNo ratings yet
- Industrial Automation: Degree in Electrical and Computer EngineeringDocument6 pagesIndustrial Automation: Degree in Electrical and Computer EngineeringRMFCNo ratings yet
- Tutorials On PLCs - NAHPIDocument7 pagesTutorials On PLCs - NAHPImarshal galilee djitsa0% (2)
- Economical Filter Valve Installation, Use and Maintenance ManualDocument13 pagesEconomical Filter Valve Installation, Use and Maintenance Manualhasanolan583No ratings yet
- Chapter 8: PLC Programming Language - Basic InstructionsDocument57 pagesChapter 8: PLC Programming Language - Basic InstructionsNguyễn Tuấn HòaNo ratings yet
- Assignment PLCDocument6 pagesAssignment PLCMuhammad Yousuf SaleemNo ratings yet
- Assignment Anup Devkota 42035Document10 pagesAssignment Anup Devkota 42035PramodNo ratings yet
- Conveyor Belt ControllerDocument8 pagesConveyor Belt Controllersd_projectmakerNo ratings yet
- PLC Exercises PDFDocument28 pagesPLC Exercises PDFzoulouweNo ratings yet
- PLC Programming Tasks (In Class or Practice Again at Home)Document3 pagesPLC Programming Tasks (In Class or Practice Again at Home)santhoshNo ratings yet
- PLC Basicsand Ladder Programming-2Document86 pagesPLC Basicsand Ladder Programming-2Ifradmanorama Papabeta2611No ratings yet
- 2-SFC Problems Enonce CorrectionDocument16 pages2-SFC Problems Enonce CorrectionLuc AusterNo ratings yet
- Instructions Manual: Unit Control Vk-30CDocument8 pagesInstructions Manual: Unit Control Vk-30Ccristino_djNo ratings yet
- TL TN DKLG - PLC - Rev20221127Document31 pagesTL TN DKLG - PLC - Rev20221127Nguyễn Quốc ToànNo ratings yet
- IA ActivityDocument5 pagesIA Activityshanmuganandabr1982No ratings yet
- Lab Manual Control Systems (EEE325) : 2 Edition August 2011Document7 pagesLab Manual Control Systems (EEE325) : 2 Edition August 2011Yasir HussainNo ratings yet
- Industrial Automation M Lab No 6 19022024 092221amDocument9 pagesIndustrial Automation M Lab No 6 19022024 092221amYOUMNA MALLICKNo ratings yet
- Latihan PLCDocument12 pagesLatihan PLCLisaNo ratings yet
- PLC Ladder Examples 2021Document18 pagesPLC Ladder Examples 2021JosephNo ratings yet
- Carbonated Filler MannuelDocument8 pagesCarbonated Filler MannuelDániel CLNo ratings yet
- ET372 Instrumentation Measurement Lab Assignment Week 7Document6 pagesET372 Instrumentation Measurement Lab Assignment Week 7Nicholas MurondaNo ratings yet
- System and Automatic Control Lab (EC-218) : Experiment No. 9Document4 pagesSystem and Automatic Control Lab (EC-218) : Experiment No. 9arjunv_14No ratings yet
- Industrial Automation Group AssignmentDocument5 pagesIndustrial Automation Group Assignmenteyoule abdiNo ratings yet
- Assignment MOTOR CTRLDocument7 pagesAssignment MOTOR CTRLhady_mirzaNo ratings yet
- Manual of Fire Water Pump Control Box FPEC100: Chongqing Mebay Technology Co., LTDDocument8 pagesManual of Fire Water Pump Control Box FPEC100: Chongqing Mebay Technology Co., LTDAnonymous vqsuRyNo ratings yet
- New Generation CX Xtrashift Transmission CalibrationDocument9 pagesNew Generation CX Xtrashift Transmission CalibrationElcoteamNo ratings yet
- Steps Actions TransitionsDocument10 pagesSteps Actions TransitionsabdullahNo ratings yet
- AB PLC Module 1 NO NC Timer CounterDocument3 pagesAB PLC Module 1 NO NC Timer CounterSachin PnchlNo ratings yet
- Jarless Con Door Drive - CompressDocument16 pagesJarless Con Door Drive - Compressexequiel cordobaNo ratings yet
- Project 3 MotorDocument22 pagesProject 3 MotorJagadeesh k v JagadeeshNo ratings yet
- PLC and Control System and AnalysisDocument10 pagesPLC and Control System and AnalysisM.AllaritNo ratings yet
- MD11 Manual 2.zh-CN - enDocument4 pagesMD11 Manual 2.zh-CN - enGilbert RoyNo ratings yet
- Fisher & Paykel Washer Fault CodesDocument21 pagesFisher & Paykel Washer Fault CodesRichard RothNo ratings yet
- Ladder Logic For Bottle Filling SystemDocument3 pagesLadder Logic For Bottle Filling SystemArunNo ratings yet
- Experiment 7 Silo SimulationDocument7 pagesExperiment 7 Silo SimulationAvinash Umesh SarmaNo ratings yet
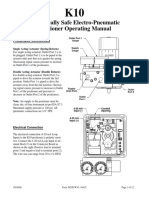
- Intrinsically Safe Electro-Pneumatic Positioner Operating ManualDocument12 pagesIntrinsically Safe Electro-Pneumatic Positioner Operating ManualhamamNo ratings yet
- Epow KS10H KS20HDocument6 pagesEpow KS10H KS20HstrahinjaNo ratings yet
- 8253 PitDocument5 pages8253 PitSunil KumarNo ratings yet
- University of Minnesota Lab 11 - Ladder Logic 1Document6 pagesUniversity of Minnesota Lab 11 - Ladder Logic 1Andrea PerezNo ratings yet
- Programación en Listado de InstruccionesDocument63 pagesProgramación en Listado de InstruccionesMauro Portugal LagardaNo ratings yet
- Monitoring and Control Systems Unit 7Document10 pagesMonitoring and Control Systems Unit 7Danial KashifNo ratings yet
- Automation Trainer ControlsDocument8 pagesAutomation Trainer ControlsAbcd123411No ratings yet
- SFC Exercises EnonceDocument12 pagesSFC Exercises EnonceLuc Auster0% (1)
- Basic Con Trol Act Ions AND Controll ERS: By: Yatendra KumarDocument82 pagesBasic Con Trol Act Ions AND Controll ERS: By: Yatendra KumarNavdeepNo ratings yet
- Codigos de Falla 1152Document8 pagesCodigos de Falla 1152German CarbajalNo ratings yet
- PLC Lab ManualDocument28 pagesPLC Lab ManualrkNo ratings yet
- Ladder Logic Interlocking III - Online Ladder Editor For Arduino - Still Beta ?Document1 pageLadder Logic Interlocking III - Online Ladder Editor For Arduino - Still Beta ?EMILIO KLAUSNo ratings yet
- Nikon D500: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsFrom EverandNikon D500: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsNo ratings yet
- Motion Control ReportFrom EverandMotion Control ReportRating: 4 out of 5 stars4/5 (1)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Fujifilm X100VI: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsFrom EverandFujifilm X100VI: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsNo ratings yet
- 2021-2022 Mecanismo Ordinario EnonceDocument2 pages2021-2022 Mecanismo Ordinario EnonceLuc AusterNo ratings yet
- Ex Enero2012 InglesDocument5 pagesEx Enero2012 InglesLuc AusterNo ratings yet
- SFC Exercises EnonceDocument12 pagesSFC Exercises EnonceLuc Auster0% (1)
- SFC Multitoken and MacrosDocument5 pagesSFC Multitoken and MacrosLuc AusterNo ratings yet
- Topic2 Part II EXERCISES SOLUTIONS Balance Sheet 2Q2013 14 Enonce CorrecionDocument32 pagesTopic2 Part II EXERCISES SOLUTIONS Balance Sheet 2Q2013 14 Enonce CorrecionLuc AusterNo ratings yet
- Industrial Technologies Engineering: Automatización Industrial UC3M Dep. de Ing. de Sistemas y AutomáticaDocument12 pagesIndustrial Technologies Engineering: Automatización Industrial UC3M Dep. de Ing. de Sistemas y AutomáticaLuc AusterNo ratings yet
- 2013 Full Problems Viscous Flow Enonce CorrectionDocument22 pages2013 Full Problems Viscous Flow Enonce CorrectionLuc AusterNo ratings yet
- Topic2 Part II Exercisessolutions Balance Sheet 2q2013 14 EnonceDocument13 pagesTopic2 Part II Exercisessolutions Balance Sheet 2q2013 14 EnonceLuc AusterNo ratings yet
- Full Problems Ecuaciones Generales Enonce Correction 100pages-73-74Document2 pagesFull Problems Ecuaciones Generales Enonce Correction 100pages-73-74Luc AusterNo ratings yet
- 2.3-Fluid StaticsDocument14 pages2.3-Fluid StaticsLuc AusterNo ratings yet
- 2.4 Fluid StaticsDocument12 pages2.4 Fluid StaticsLuc AusterNo ratings yet
- EPEF 06 Problems wk08-09Document4 pagesEPEF 06 Problems wk08-09Luc AusterNo ratings yet
- EPEF 03-04 Problems Problems wk06 CorrDocument3 pagesEPEF 03-04 Problems Problems wk06 CorrLuc AusterNo ratings yet
- 2.2-Fluid StaticsDocument17 pages2.2-Fluid StaticsLuc AusterNo ratings yet
- EPEF 05 Problems wk07Document3 pagesEPEF 05 Problems wk07Luc AusterNo ratings yet
- Learn JavaScript - Functions CheatsheetDocument2 pagesLearn JavaScript - Functions CheatsheetpreeyalNo ratings yet
- Christmas DollDocument20 pagesChristmas Dollcraftycow62No ratings yet
- Currency Trading in Networth Stock Broking LTDDocument67 pagesCurrency Trading in Networth Stock Broking LTDRajesh BathulaNo ratings yet
- Final Asian StudiesDocument9 pagesFinal Asian StudiesRazel G. TaquisoNo ratings yet
- La Ciencia Misteriosa de Los Faraones Del Abate T Moreux CompressDocument300 pagesLa Ciencia Misteriosa de Los Faraones Del Abate T Moreux CompresssalguerotiNo ratings yet
- 12 - Chapter 5 PDFDocument41 pages12 - Chapter 5 PDFrajveer kaurNo ratings yet
- Fbidoj ComplaintDocument7 pagesFbidoj ComplaintPennLiveNo ratings yet
- 2023 Science 8 Final Exam Study GuideDocument5 pages2023 Science 8 Final Exam Study GuideParas SharmaNo ratings yet
- Artificial Intelligence in The Insurance SectorDocument13 pagesArtificial Intelligence in The Insurance SectorSupratim DattaNo ratings yet
- HAZOP STUDY-Madu PDFDocument21 pagesHAZOP STUDY-Madu PDFTirupati JalnilNo ratings yet
- All Purpose Pumps Pump Station BrochureDocument7 pagesAll Purpose Pumps Pump Station BrochureBarrasons Engineers TeamNo ratings yet
- Numbers Worksheets From One To 20Document10 pagesNumbers Worksheets From One To 20Mazhar FarNo ratings yet
- Chapter 8 Bonding Powerpoint AP ChemDocument68 pagesChapter 8 Bonding Powerpoint AP ChemAbdul jan sultaniNo ratings yet
- All 16 Strategies in A NutshellDocument1 pageAll 16 Strategies in A NutshellLakshay SharmaNo ratings yet
- Problem Solution Fit Canvas by Daria Nepriakhina Ideahackers NetworkDocument1 pageProblem Solution Fit Canvas by Daria Nepriakhina Ideahackers NetworkbeeNo ratings yet
- The Food Industry in Nigeria Development and QualiDocument6 pagesThe Food Industry in Nigeria Development and Qualimercy luwaNo ratings yet
- Business Management Notes PDFDocument63 pagesBusiness Management Notes PDFRofhiwa RamahalaNo ratings yet
- 65.000 KH CA Nhan AcbDocument2,048 pages65.000 KH CA Nhan Acbhu hila0% (1)
- Portage Manor PresentationDocument19 pagesPortage Manor PresentationWNDUNo ratings yet
- Chfs ExamplesDocument4 pagesChfs ExamplescsdhimanNo ratings yet
- ADR TopicsDocument14 pagesADR TopicsSathvik ReddyNo ratings yet
- The National Service Training Program (Ra 9163) : NSTP - Cwts 1 I. TitleDocument4 pagesThe National Service Training Program (Ra 9163) : NSTP - Cwts 1 I. TitleMekhaela Villaruel TinadorNo ratings yet
- Heck Vs SantosDocument3 pagesHeck Vs SantosMasterboleroNo ratings yet
- The Voice On The Skin Self-Mutilation and MerleauDocument13 pagesThe Voice On The Skin Self-Mutilation and MerleauDr FreudNo ratings yet
- CVCS Lesson Morda AllDocument29 pagesCVCS Lesson Morda Alli am henryNo ratings yet
- PM Debug InfoDocument88 pagesPM Debug InfoanaguadalupemendozaortizNo ratings yet