Download as pdf or txt
You might also like
- Linux Commands Cheat SheetDocument129 pagesLinux Commands Cheat SheetRakesh RakeeNo ratings yet
- 19 - Introduction To Neural NetworksDocument7 pages19 - Introduction To Neural NetworksRugalNo ratings yet
- Optimal Neural Network Models For Wind SDocument12 pagesOptimal Neural Network Models For Wind SMuneeba JahangirNo ratings yet
- Exp 3Document9 pagesExp 3Swastik guptaNo ratings yet
- Jaringan Saraf TiruanDocument8 pagesJaringan Saraf Tiruansubandiwahyudi08No ratings yet
- DL Question Bank AnswersDocument55 pagesDL Question Bank AnswersAnkit MahapatraNo ratings yet
- Principles of Training Multi-Layer Neural Network Using BackpropagationDocument15 pagesPrinciples of Training Multi-Layer Neural Network Using Backpropagationkamalamdharman100% (1)
- Session 1Document8 pagesSession 1Ramu ThommandruNo ratings yet
- Unit 2 - Soft Computing - WWW - Rgpvnotes.inDocument20 pagesUnit 2 - Soft Computing - WWW - Rgpvnotes.inRozy VadgamaNo ratings yet
- Unit II Supervised IIDocument16 pagesUnit II Supervised IIindiraNo ratings yet
- Soft Computing-Lab FileDocument40 pagesSoft Computing-Lab FileAaaNo ratings yet
- Name-Surya Pratap Singh Enrolment No. - 0829IT181023 Subject - Soft Computing Subject Code - IT701Document17 pagesName-Surya Pratap Singh Enrolment No. - 0829IT181023 Subject - Soft Computing Subject Code - IT701Surya PratapNo ratings yet
- Back Propagation Algorithm - A Review: Mrinalini Smita & Dr. Anita KumariDocument6 pagesBack Propagation Algorithm - A Review: Mrinalini Smita & Dr. Anita KumariTJPRC PublicationsNo ratings yet
- Filtering Noises From Speech Signal: A BPNN ApproachDocument4 pagesFiltering Noises From Speech Signal: A BPNN Approacheditor_ijarcsseNo ratings yet
- Amansoftcomp PDFDocument27 pagesAmansoftcomp PDFas6858732No ratings yet
- Real Timepower System Security - EEEDocument7 pagesReal Timepower System Security - EEEpradeep9007879No ratings yet
- FeedforwardDocument34 pagesFeedforwardkiranNo ratings yet
- Back Propagation AlgorithmDocument13 pagesBack Propagation AlgorithmHerald RufusNo ratings yet
- 076bct041 AI Lab4Document6 pages076bct041 AI Lab4Nishant LuitelNo ratings yet
- Neural Network Two Mark Q.BDocument19 pagesNeural Network Two Mark Q.BMohanvel2106No ratings yet
- UNIT IV - Neural NetworksDocument7 pagesUNIT IV - Neural Networkslokesh KoppanathiNo ratings yet
- ANN ModelsDocument42 pagesANN ModelsAakansh ShrivastavaNo ratings yet
- Neural Network Approach To Power System Security Analysis: Bidyut Ranjan Das Author, and Dr. Ashish Chaturvedi AuthorDocument4 pagesNeural Network Approach To Power System Security Analysis: Bidyut Ranjan Das Author, and Dr. Ashish Chaturvedi AuthorInternational Journal of computational Engineering research (IJCER)No ratings yet
- Application of Artificial Neural NetworkDocument7 pagesApplication of Artificial Neural NetworkRahul Kumar JhaNo ratings yet
- A Multilayer Feed-Forward Neural NetworkDocument9 pagesA Multilayer Feed-Forward Neural NetworkdebmatraNo ratings yet
- Adaline Madaline Comes Under The Supervised Learning NetworksDocument8 pagesAdaline Madaline Comes Under The Supervised Learning NetworksNETHALA ANUSHA (N151064)No ratings yet
- Supervised Learning: Csm10: BACKPROPAGATION: An Example ofDocument6 pagesSupervised Learning: Csm10: BACKPROPAGATION: An Example ofMaruthi JacsNo ratings yet
- Multilayered Network ArchitecturesDocument34 pagesMultilayered Network Architecturesaniruthan venkatavaradhanNo ratings yet
- Pattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkDocument5 pagesPattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkEkin RafiaiNo ratings yet
- D.Y. Patil College of Engineering, Akurdi Department of Electronics & Telecommunication EngineeringDocument41 pagesD.Y. Patil College of Engineering, Akurdi Department of Electronics & Telecommunication EngineeringP SNo ratings yet
- Back-Propagation Algorithm of CHBPN CodeDocument10 pagesBack-Propagation Algorithm of CHBPN Codesch203No ratings yet
- Artificial Neural Networks in Bi: Information System Dept ITS Surabaya 2009Document42 pagesArtificial Neural Networks in Bi: Information System Dept ITS Surabaya 2009Mochammad Adji FirmansyahNo ratings yet
- Neural NetworksDocument6 pagesNeural NetworksARVINDNo ratings yet
- ML Unit-IvDocument19 pagesML Unit-IvYadavilli VinayNo ratings yet
- Neural NetworksDocument37 pagesNeural NetworksOmiarNo ratings yet
- ARTIFICIAL NEURAL NETWORKS-moduleIIIDocument61 pagesARTIFICIAL NEURAL NETWORKS-moduleIIIelakkadanNo ratings yet
- AIML - 04 Single Layer PerceptronDocument11 pagesAIML - 04 Single Layer PerceptronUMANG PEDNEKARNo ratings yet
- Uni2 NNDLDocument21 pagesUni2 NNDLSONY P J 2248440No ratings yet
- Learning Law in Neural NetworksDocument19 pagesLearning Law in Neural NetworksMani Singh100% (2)
- Unit2 Soft ComputingDocument22 pagesUnit2 Soft ComputingRAPTER GAMINGNo ratings yet
- Fast Training of Multilayer PerceptronsDocument15 pagesFast Training of Multilayer Perceptronsgarima_rathiNo ratings yet
- Applied Deep Learning - Part 1 - Artificial Neural Networks - by Arden Dertat - Towards Data ScienceDocument34 pagesApplied Deep Learning - Part 1 - Artificial Neural Networks - by Arden Dertat - Towards Data ScienceMonika DhochakNo ratings yet
- Patel Collage of Science and Technology Indore (M.P) : Lab IIDocument14 pagesPatel Collage of Science and Technology Indore (M.P) : Lab IIOorvi ThakurNo ratings yet
- Lecture 2Document3 pagesLecture 2DineshNewalkarNo ratings yet
- Artificial Neural NetworksDocument24 pagesArtificial Neural Networkspunita singhNo ratings yet
- Breast Cancer Prediction Using MachineDocument6 pagesBreast Cancer Prediction Using MachineSaurav PareekNo ratings yet
- ANN PG Module1Document75 pagesANN PG Module1Sreerag Kunnathu SugathanNo ratings yet
- CNN and Gan: Introduction ToDocument58 pagesCNN and Gan: Introduction ToGopiNath VelivelaNo ratings yet
- Artificial Neural NetworksDocument34 pagesArtificial Neural NetworksAYESHA SHAZNo ratings yet
- Assign 1 Soft CompDocument12 pagesAssign 1 Soft Compsharmasunishka30No ratings yet
- BackpropagationDocument12 pagesBackpropagationali.nabeel246230No ratings yet
- Artificial Intelligence & Neural Networks Unit-5 Basics of NNDocument16 pagesArtificial Intelligence & Neural Networks Unit-5 Basics of NNMukesh50% (2)
- Institute of Engineering and Technology Davv, Indore: Lab Assingment OnDocument14 pagesInstitute of Engineering and Technology Davv, Indore: Lab Assingment OnNikhil KhatloiyaNo ratings yet
- Ann R16 Unit 4 PDFDocument16 pagesAnn R16 Unit 4 PDFsricharanreddymamidiNo ratings yet
- Detection and Classification of Power Quality Disturbances in The Supply To Induction Motor Using Wavelet Transform and Neural NetworksDocument9 pagesDetection and Classification of Power Quality Disturbances in The Supply To Induction Motor Using Wavelet Transform and Neural NetworksNadeem TunioNo ratings yet
- Data Mining-BackpropagationDocument5 pagesData Mining-BackpropagationRaj Endran100% (1)
- Power Flow Analysis of RDS by Artificial Network Technique: Vaishali Holkar, Dr. Deepika MasandDocument5 pagesPower Flow Analysis of RDS by Artificial Network Technique: Vaishali Holkar, Dr. Deepika MasandMarcelo FreitasNo ratings yet
- Published Indoor NavigationDocument6 pagesPublished Indoor NavigationsaiNo ratings yet
- DL Question Bank AnswersDocument55 pagesDL Question Bank AnswersAnkit MahapatraNo ratings yet
- Uni2 NN 2023Document52 pagesUni2 NN 2023SONY P J 2248440No ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Annex CHDocument22 pagesAnnex CHMario1234No ratings yet
- GridView Crud Operations (Insert Select Edit Update Delete) Using Single Stored Procedure Example - ASP - Net, C#.NET, VBDocument8 pagesGridView Crud Operations (Insert Select Edit Update Delete) Using Single Stored Procedure Example - ASP - Net, C#.NET, VBChandra Sekhar GajulaNo ratings yet
- Guardshield Type 2 Safety Light Curtain: Installation InstructionsDocument20 pagesGuardshield Type 2 Safety Light Curtain: Installation InstructionsrajavinugmailcomNo ratings yet
- Inplant Training: Diploma in Civil Engineering ProgrammeDocument42 pagesInplant Training: Diploma in Civil Engineering ProgrammeANUSHA DS0% (1)
- Springs: Dr. Ashish Deshmukh, Associate Professor, Svkms Nmims Mpstme, MumbaiDocument43 pagesSprings: Dr. Ashish Deshmukh, Associate Professor, Svkms Nmims Mpstme, MumbaiVanessa SmithNo ratings yet
- Intelligent Light ChamberDocument14 pagesIntelligent Light Chamberrisktaker105No ratings yet
- Direct Torque Control With Space Vector Modulation For IM Fed by Cascaded Multilevel InvertersDocument5 pagesDirect Torque Control With Space Vector Modulation For IM Fed by Cascaded Multilevel Inverterssajs201No ratings yet
- ECM ProcessDocument15 pagesECM ProcessSandro DomeneghettiNo ratings yet
- Escavadeira CAT 6050 - 6050 - FSDocument12 pagesEscavadeira CAT 6050 - 6050 - FSgeilsom mouraNo ratings yet
- Ingco Product List July 2020Document25 pagesIngco Product List July 2020anil_24_007No ratings yet
- 1.7 Mathematical Analysis of Non Recursive AlgorithmDocument7 pages1.7 Mathematical Analysis of Non Recursive AlgorithmsaiNo ratings yet
- Ideal Lift KinematicsDocument16 pagesIdeal Lift KinematicscabekiladNo ratings yet
- Experimental and Analysis of Welding Electrode Wire Straightening and Cutting MachineDocument14 pagesExperimental and Analysis of Welding Electrode Wire Straightening and Cutting MachineTarig shgool HagarNo ratings yet
- Eco No MetricsDocument312 pagesEco No MetricshalhoshanNo ratings yet
- Review 2: Part 1-State of StressDocument12 pagesReview 2: Part 1-State of StressasadrNo ratings yet
- Aluminum RF Power Splitters Under TestDocument7 pagesAluminum RF Power Splitters Under TesttomasNo ratings yet
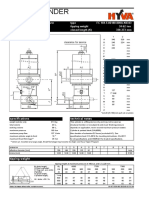
- Hyva CylinderDocument2 pagesHyva CylinderDinifaanNo ratings yet
- UNIT IV 4 DempsterShaferTheoryDocument19 pagesUNIT IV 4 DempsterShaferTheorySravani Srav100% (1)
- IOQC2021 PartII Questions enDocument13 pagesIOQC2021 PartII Questions enDhamodharan SrinivasanNo ratings yet
- Transformer Primary Injection Calculation Spreadsheet: Ynd With in Zone Earthing Transformer On LV (Delta) SideDocument2 pagesTransformer Primary Injection Calculation Spreadsheet: Ynd With in Zone Earthing Transformer On LV (Delta) Sidewaleed_mohamed_10No ratings yet
- Solar Energy Storage MethodDocument11 pagesSolar Energy Storage MethodĐặng HuyNo ratings yet
- JCL UtilitiesDocument5 pagesJCL UtilitiespallaviNo ratings yet
- ED Multiple Choice QuestionsDocument7 pagesED Multiple Choice QuestionsLaxmireddy Peram43% (7)
- The Adjustment Instructions of The Control Parameters of The Fardriver ControllerDocument6 pagesThe Adjustment Instructions of The Control Parameters of The Fardriver ControllerTips Trik TechnologyNo ratings yet
- Lecture Chapter 4 Phase Transformation and Metal AlloysDocument79 pagesLecture Chapter 4 Phase Transformation and Metal AlloysWinni TanNo ratings yet
- Erlang PDF LibraryDocument2 pagesErlang PDF LibraryCalvinNo ratings yet
- Connectivity (Graph Theory) PDFDocument5 pagesConnectivity (Graph Theory) PDFmarsNo ratings yet
- Biochem Scale Up.Document9 pagesBiochem Scale Up.Ana Lorraine DalilisNo ratings yet
- Module 1Document4 pagesModule 1kstopandmotionNo ratings yet