Download as pdf or txt
You might also like
- Sample Thesis Defense Questions and AnswersDocument6 pagesSample Thesis Defense Questions and AnswersMarjon Maurillo Lucero100% (8)
- The Mandela Effect, Déjà Vu and Possible Interactions With The Parallel WorldDocument15 pagesThe Mandela Effect, Déjà Vu and Possible Interactions With The Parallel Worldanimal consultNo ratings yet
- Introduction To ODEDocument8 pagesIntroduction To ODEFrancis PrudenciadoNo ratings yet
- معادلات تفاضليةDocument20 pagesمعادلات تفاضليةyasiralordiNo ratings yet
- Introduction To Ordinary Differential EquationsDocument25 pagesIntroduction To Ordinary Differential EquationsShehroze TalatNo ratings yet
- Ode RevisionDocument54 pagesOde RevisionAriane May DacilloNo ratings yet
- @ODE Warmup PDFDocument54 pages@ODE Warmup PDFDivyam BaukhandiNo ratings yet
- Lecture 3 (Seperable ODEs) by Dr. Umber SheikhDocument20 pagesLecture 3 (Seperable ODEs) by Dr. Umber SheikhHaider RanaNo ratings yet
- Introduction of ODEsDocument40 pagesIntroduction of ODEsMuhammad Aminnur Hasmin B. HasminNo ratings yet
- Lecture 1 - Numerical Solution of Differential EquationsDocument50 pagesLecture 1 - Numerical Solution of Differential EquationsAli ًSameerNo ratings yet
- Introduction To Ordinary Differential Equations: Nazir MafakheriDocument36 pagesIntroduction To Ordinary Differential Equations: Nazir MafakheriHemenMoNo ratings yet
- Lecture Note 1 PDFDocument30 pagesLecture Note 1 PDF장준영No ratings yet
- Boyce 2.1-6Document2 pagesBoyce 2.1-6Adriana OrtizNo ratings yet
- Actr PPT MatlabDocument20 pagesActr PPT MatlabmaulikNo ratings yet
- Lecture 5 (Numerical Solution of Ordinary Differential Equations)Document20 pagesLecture 5 (Numerical Solution of Ordinary Differential Equations)omar.alshehhi98No ratings yet
- Problem Sheet 2: Applied Differential Equations: 5CCM211A & 6CCM211BDocument2 pagesProblem Sheet 2: Applied Differential Equations: 5CCM211A & 6CCM211BHarshvardhan SinghNo ratings yet
- EE16B HW 3 SolutionsDocument12 pagesEE16B HW 3 SolutionsSummer YangNo ratings yet
- University of Zimbabwe Ordinary Differential Equations: Mathematics Office No 211Document54 pagesUniversity of Zimbabwe Ordinary Differential Equations: Mathematics Office No 211Khulekani MafufuNo ratings yet
- +++unit 2 - Analytical Solution Techniques For ODEsDocument63 pages+++unit 2 - Analytical Solution Techniques For ODEsbasheribrahim47No ratings yet
- Module 4 - Tutorial - Sheet - DET - BMAT102LDocument3 pagesModule 4 - Tutorial - Sheet - DET - BMAT102Lmuhammedriza27No ratings yet
- Basic Differential Equations (For Before The Beginning of Class)Document3 pagesBasic Differential Equations (For Before The Beginning of Class)pedrodotnetNo ratings yet
- EPS Mathematics 3: Delivered By: Soori Prashant Kumar P.k.soori@hw - Ac.ukDocument74 pagesEPS Mathematics 3: Delivered By: Soori Prashant Kumar P.k.soori@hw - Ac.ukAkmal Zeb KhanNo ratings yet
- MATH 219: Spring 2021-22Document7 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Problem Sheet 10: Applied Differential Equations: 5CCM211A & 6CCM211BDocument1 pageProblem Sheet 10: Applied Differential Equations: 5CCM211A & 6CCM211BHarshvardhan SinghNo ratings yet
- Chapter 2 ReviewDocument10 pagesChapter 2 ReviewkareeraisuNo ratings yet
- Odes: Initial-Value ProblemsDocument88 pagesOdes: Initial-Value ProblemsAndres S LutzNo ratings yet
- Tarea 6Document2 pagesTarea 6ksva2326No ratings yet
- 2 DSystemsDocument14 pages2 DSystemsSaujatya MandalNo ratings yet
- Second Order Odes: Koushik ViswanathanDocument17 pagesSecond Order Odes: Koushik ViswanathanAbhiyan PaudelNo ratings yet
- Problems: 1.3 Definitions, Classification, and TerminologyDocument2 pagesProblems: 1.3 Definitions, Classification, and TerminologyJUAN ESTEBAN HERNANDEZ ELEJALDENo ratings yet
- Boyce ODEch 2 S 1 P 04Document2 pagesBoyce ODEch 2 S 1 P 04Elza Dwi PutriNo ratings yet
- Seccion 2.6 Ejercicio 8Document5 pagesSeccion 2.6 Ejercicio 8CrisNo ratings yet
- 1 0 TerminologyDocument10 pages1 0 TerminologyMuavha MadembeNo ratings yet
- Differential EquationsDocument3 pagesDifferential EquationsAmreshAmanNo ratings yet
- Related Rates Problems Time RatesDocument10 pagesRelated Rates Problems Time RatesElmer VillegasNo ratings yet
- MMEcon Handouts 18 Difference - EquationDocument44 pagesMMEcon Handouts 18 Difference - EquationAditya KumarNo ratings yet
- E Y(s) Ds Se Ds DS: ExampleDocument7 pagesE Y(s) Ds Se Ds DS: ExampleLyseth Karina Gómez RoseroNo ratings yet
- Cuando No Existe Rozamiento: y +5 y X Z LN X X eDocument4 pagesCuando No Existe Rozamiento: y +5 y X Z LN X X eJose ArancibiaNo ratings yet
- Laplace TransferFunctionsDocument23 pagesLaplace TransferFunctionsHera-Mae Granada AñoraNo ratings yet
- Boyce 2.1-8Document2 pagesBoyce 2.1-8Adriana OrtizNo ratings yet
- Chapter 6Document29 pagesChapter 6Bereket DesalegnNo ratings yet
- Second Order ODE UWSDocument17 pagesSecond Order ODE UWSnirakaru123No ratings yet
- Population Logistics Chemical EthanolDocument8 pagesPopulation Logistics Chemical EthanolTuling, Jose Jr., D.No ratings yet
- Differential Equations NoteDocument25 pagesDifferential Equations NoteSumudu DilshanNo ratings yet
- MIT Differential Equations NotesDocument233 pagesMIT Differential Equations NotesTheDarknessNo ratings yet
- EngineeringDocument4 pagesEngineeringAbdul MunamNo ratings yet
- 2 UndeterminedCoefficients SDocument39 pages2 UndeterminedCoefficients SRivalelo HeavymanNo ratings yet
- Class 13th NovDocument34 pagesClass 13th NovmileknzNo ratings yet
- Calculus of Parametric EquationsDocument2 pagesCalculus of Parametric EquationsLuca YounesNo ratings yet
- Deq11 Final SolDocument3 pagesDeq11 Final Sol陳浚維No ratings yet
- 2011 蔡淳仁 FinalDocument3 pages2011 蔡淳仁 Final陳浚維No ratings yet
- ODE HW 2.1 SOLUTION PDFDocument19 pagesODE HW 2.1 SOLUTION PDFCarlos CabrejosNo ratings yet
- 1 2 SeparateVariablesDocument13 pages1 2 SeparateVariablesMuavha MadembeNo ratings yet
- Partial Derivative of Composite FunctionDocument5 pagesPartial Derivative of Composite FunctionDibyananda SahooNo ratings yet
- NOTES - Conics, Parametric Equations, and Polar Coordinates (CHPT 10)Document6 pagesNOTES - Conics, Parametric Equations, and Polar Coordinates (CHPT 10)nyan kumamonNo ratings yet
- Lecture 10SDocument17 pagesLecture 10SSATISH PATINo ratings yet
- Chapter 4Document23 pagesChapter 4Marwa Ismail KamelNo ratings yet
- Laplace Transform ExamDocument1 pageLaplace Transform ExamJulius CagampangNo ratings yet
- Tutorial 2Document2 pagesTutorial 2Arpita MathurNo ratings yet
- Math 234, Practice Test #4Document6 pagesMath 234, Practice Test #4H Aries OñaNo ratings yet
- 2012 Applications of Differentiation Barely Passed PDFDocument8 pages2012 Applications of Differentiation Barely Passed PDFDouglas TanNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Magnetic SeparatorDocument29 pagesMagnetic SeparatorAnonymous rHxYVxtBNo ratings yet
- Lecture - 1 ELECTRICAL TECHNOLOGYDocument19 pagesLecture - 1 ELECTRICAL TECHNOLOGYsakibNo ratings yet
- Are Ghosts RealDocument5 pagesAre Ghosts RealBogdan BerenghiaNo ratings yet
- Reliability 2Document8 pagesReliability 2Georgina SuleNo ratings yet
- Characterization and Modeling of The Fatigue Behavior of TPUDocument6 pagesCharacterization and Modeling of The Fatigue Behavior of TPUDeepak SharmaNo ratings yet
- Solidification: A. Crystallization and The Development of Cast StructureDocument5 pagesSolidification: A. Crystallization and The Development of Cast StructureAsif AhmedNo ratings yet
- Characterization of MicroemulsionsDocument4 pagesCharacterization of Microemulsionschums_23No ratings yet
- Resultant Force: 1. Name The Forces That Acted On The ObjectDocument12 pagesResultant Force: 1. Name The Forces That Acted On The ObjectayydenNo ratings yet
- Asset Health & Probability of Failure: Calculations For Transformers and BreakersDocument19 pagesAsset Health & Probability of Failure: Calculations For Transformers and Breakerscarlos patrickNo ratings yet
- Dynamic Analysis of Suspended Cables Carr - 2007 - International Journal of SoliDocument19 pagesDynamic Analysis of Suspended Cables Carr - 2007 - International Journal of SoliFabio PelleritoNo ratings yet
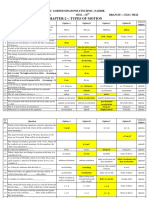
- (MCQ'S) Types of MotionDocument12 pages(MCQ'S) Types of Motionarpit patilNo ratings yet
- Mohan2009 PDFDocument12 pagesMohan2009 PDFahmalisha2No ratings yet
- Chapter 4 - Fluid KinematicsDocument53 pagesChapter 4 - Fluid KinematicsDawit MengisteabNo ratings yet
- Leonhard EulerDocument17 pagesLeonhard EulerLeonhard EulerNo ratings yet
- Matter in Our Surroundings: 1. Ncert Intext QuestionsDocument7 pagesMatter in Our Surroundings: 1. Ncert Intext QuestionsKumar AbhishantNo ratings yet
- 12 Physics Reduced Syllabus Study MaterialDocument108 pages12 Physics Reduced Syllabus Study MaterialPRAANESH CNo ratings yet
- TOLC Exam 2Document4 pagesTOLC Exam 2Tejas ChNo ratings yet
- Peter Atkins Julio de Paula Ron Friedman Physical Chemistry Quanta (0307-0357)Document51 pagesPeter Atkins Julio de Paula Ron Friedman Physical Chemistry Quanta (0307-0357)Administracion OTIC IVIC100% (1)
- IMONST 2 Reading Material-3Document20 pagesIMONST 2 Reading Material-3Chee Beng YeapNo ratings yet
- Bolt Thread Coefficient of Friction TesterDocument48 pagesBolt Thread Coefficient of Friction TesterOwethu CibiNo ratings yet
- The TDS EquationsDocument1 pageThe TDS Equationsanon_59872224467% (3)
- (Template) As WEEK 5&6Document3 pages(Template) As WEEK 5&6Jaemee Agnes BoadoNo ratings yet
- 3rd of 19 Chapters) Kinetic Particle Theory - GCE O Level Chemistry LectureDocument19 pages3rd of 19 Chapters) Kinetic Particle Theory - GCE O Level Chemistry LectureDylanNo ratings yet
- HSFG Bolt Torque1 - ReferenceDocument9 pagesHSFG Bolt Torque1 - Referenceprabu sundaramNo ratings yet
- JOINT AND COMBINED VariationDocument20 pagesJOINT AND COMBINED VariationJULIOUS JOSEPH TAROYNo ratings yet
- ODS TG Lev4 PDFDocument186 pagesODS TG Lev4 PDFPhilos Shopia AlvaradoNo ratings yet
- Electricity and Magnetism (Outline)Document2 pagesElectricity and Magnetism (Outline)CARLO NOCILONo ratings yet
- 9780 - Week 2 - Sound WavesDocument3 pages9780 - Week 2 - Sound Wavesvivianada683No ratings yet