Download as pdf or txt
You might also like
- Motivation Letter SampleDocument1 pageMotivation Letter SampleMoulid Abdirahman AliNo ratings yet
- Motor DC Control System Using PID ControllerDocument4 pagesMotor DC Control System Using PID ControllerenrikeNo ratings yet
- Tute Lea 2013Document6 pagesTute Lea 2013venkatachalamNo ratings yet
- Full Order Observer Controller Design For DC Motor Based On State Space ApproachDocument5 pagesFull Order Observer Controller Design For DC Motor Based On State Space ApproachSelaRajNo ratings yet
- Sliding Mode Controller Design For Controlling The Speed of A DC MotorDocument5 pagesSliding Mode Controller Design For Controlling The Speed of A DC Motorbokic88No ratings yet
- Optimal State Space Control DC MotorDocument6 pagesOptimal State Space Control DC MotoraurivalNo ratings yet
- Wind Energy Research PaperDocument4 pagesWind Energy Research PaperKumail Hasan NaqviNo ratings yet
- Controlling DC Motor Position, Using PID Controller Made by PIC MicrocontrollerDocument9 pagesControlling DC Motor Position, Using PID Controller Made by PIC Microcontrollerminh nguyenNo ratings yet
- DC Motor Parameter Identification Using Speed Step ResponsesDocument6 pagesDC Motor Parameter Identification Using Speed Step ResponsesHasson SniperNo ratings yet
- 45 1530697786 - 04-07-2018 PDFDocument5 pages45 1530697786 - 04-07-2018 PDFrahul sharmaNo ratings yet
- A Modified Method For Tuning PID Controller For Buck-Boost ConverterDocument7 pagesA Modified Method For Tuning PID Controller For Buck-Boost ConverterIJAERS JOURNALNo ratings yet
- Robust DTC Control of Doubly-Fed Induction Machines Based On Input-Output Feedback Linearization Using Recurrent Neural NetworksDocument7 pagesRobust DTC Control of Doubly-Fed Induction Machines Based On Input-Output Feedback Linearization Using Recurrent Neural NetworksnaserhashemniaNo ratings yet
- DC Motor Speed Control Using Fuzzy Logic Controller: Articles You May Be Interested inDocument7 pagesDC Motor Speed Control Using Fuzzy Logic Controller: Articles You May Be Interested inWai ChiNo ratings yet
- Final Submission - IMCERT - ID32 - 30-1-23Document5 pagesFinal Submission - IMCERT - ID32 - 30-1-23Usman RaiNo ratings yet
- Comparison Between Butterfly Optimization Algorithm and Particle Swarm Optimization For Tuning Cascade PID Control System of PMDC MotorDocument9 pagesComparison Between Butterfly Optimization Algorithm and Particle Swarm Optimization For Tuning Cascade PID Control System of PMDC MotorFresy NugrohoNo ratings yet
- Irjet V4i8388Document12 pagesIrjet V4i8388Vijetha KNo ratings yet
- An Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlDocument5 pagesAn Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlArif AfifNo ratings yet
- Paper 8-Direct Torque Control of Saturated Doubly Fed Induction PDFDocument7 pagesPaper 8-Direct Torque Control of Saturated Doubly Fed Induction PDFmarouan86No ratings yet
- 10 Chapter 02 PDFDocument36 pages10 Chapter 02 PDFragab abulmagdNo ratings yet
- Design of Integral Sliding Mode Controller For Servo DC MotorDocument7 pagesDesign of Integral Sliding Mode Controller For Servo DC MotorTolcha LemmaNo ratings yet
- 1.an Advanced Control Strategy For Magnetic Levitation Train System Based On An Online Adaptive Pid ControllerDocument6 pages1.an Advanced Control Strategy For Magnetic Levitation Train System Based On An Online Adaptive Pid ControllerManuel DíazNo ratings yet
- Implementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmDocument7 pagesImplementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmMustafa AlhumayreNo ratings yet
- An Experimental Assessment of Direct Torque Control and Model Predictive Control Methods For Induction Machine DriveDocument6 pagesAn Experimental Assessment of Direct Torque Control and Model Predictive Control Methods For Induction Machine DriveAbo KikiNo ratings yet
- Robust Position Control in DC Motor by Fuzzy Sliding Mode ControlDocument6 pagesRobust Position Control in DC Motor by Fuzzy Sliding Mode ControlHoàng LongNo ratings yet
- European Journal of Electrical Engineering: Received: 30 May 2020 Accepted: 16 November 2020Document8 pagesEuropean Journal of Electrical Engineering: Received: 30 May 2020 Accepted: 16 November 2020Dileep VarmaNo ratings yet
- Project Report DCSDocument51 pagesProject Report DCSEngr XamirNo ratings yet
- Model Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationDocument19 pagesModel Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationAlimamy KoromaNo ratings yet
- Transient Stability Analysis of Power System Using MatlabDocument5 pagesTransient Stability Analysis of Power System Using MatlabSaddam HussainNo ratings yet
- Adams or Simulink - Slider CrankDocument4 pagesAdams or Simulink - Slider CrankAbhilashUNNo ratings yet
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDocument15 pagesSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNo ratings yet
- Vlsi Design Approach To High-Performance Direct Torque Control of Induction Motor DrivesDocument8 pagesVlsi Design Approach To High-Performance Direct Torque Control of Induction Motor Drivesjooner45No ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Speed Control of DC Motor Using Pid ControllerDocument4 pagesSpeed Control of DC Motor Using Pid ControllerIvan David Smith100% (1)
- AEE 68 1 2019 - Art - 8Document14 pagesAEE 68 1 2019 - Art - 8Ali ErNo ratings yet
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDocument22 pagesInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidNo ratings yet
- Simulation and Analysis of Modified DTC of PMSMDocument10 pagesSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeNo ratings yet
- Paper 5Document9 pagesPaper 5Aisha ShaikhNo ratings yet
- Damping Torsional Oscillations in Large Turbo-Generators Using Thyristor Controlled Braking ResistorsDocument7 pagesDamping Torsional Oscillations in Large Turbo-Generators Using Thyristor Controlled Braking ResistorsKanhaiya lal MaliNo ratings yet
- Sliding Mode and PI Controllers For Uncertain Flexible Joint ManipulatorDocument8 pagesSliding Mode and PI Controllers For Uncertain Flexible Joint ManipulatorHAFEDH ABIDNo ratings yet
- Speed Control of DC Motor Using Sliding Mode Control ApproachDocument5 pagesSpeed Control of DC Motor Using Sliding Mode Control ApproachIOSRjournalNo ratings yet
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDocument8 pagesOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyNo ratings yet
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorDocument5 pagesA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotordanielzNo ratings yet
- Matlab & Simulink Simulation With FPGA-Based Implementation Sliding Mode Control of A Permanent Magnet Synchronous Machine DriveDocument12 pagesMatlab & Simulink Simulation With FPGA-Based Implementation Sliding Mode Control of A Permanent Magnet Synchronous Machine DriveraghuaadsNo ratings yet
- Direct Torque Control Strategy Based On Fuzzy LogiDocument9 pagesDirect Torque Control Strategy Based On Fuzzy Logibounabalaeddineyahoo.frNo ratings yet
- An - Application - of - Explicit - Model - Predictive - Control - To - Electric - Power - Assisted - Steering - SystemsDocument6 pagesAn - Application - of - Explicit - Model - Predictive - Control - To - Electric - Power - Assisted - Steering - Systems시드세흐리아르알리나크비No ratings yet
- Ga Speed and DQ Currnets Control of PMSM WithDocument9 pagesGa Speed and DQ Currnets Control of PMSM Withhieuhuech1No ratings yet
- DTC SVMDocument22 pagesDTC SVMxeta123No ratings yet
- Jsaer2014 01 02 55 63Document9 pagesJsaer2014 01 02 55 63jsaereditorNo ratings yet
- Control of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode ControlDocument6 pagesControl of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode Controlc0d3rNo ratings yet
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorDocument5 pagesA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorMd Mustafa KamalNo ratings yet
- Robust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic ManipulatorstDocument6 pagesRobust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic Manipulatorstbaoboi13112007No ratings yet
- Speed Control of DC Motor Using Artificial Bee Colony Optimization TechniqueDocument9 pagesSpeed Control of DC Motor Using Artificial Bee Colony Optimization TechniqueMuslim FirnandaNo ratings yet
- IET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticDocument10 pagesIET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticSuba ShiniNo ratings yet
- The Comparative Analysis of Modelling of Simscape Physical Plant System Design and Armature-Controlled System Design of DC MotorDocument5 pagesThe Comparative Analysis of Modelling of Simscape Physical Plant System Design and Armature-Controlled System Design of DC MotorRaihan Adi NugrohoNo ratings yet
- Speed Control of DC Motor Using Fuzzy PID ControllerDocument15 pagesSpeed Control of DC Motor Using Fuzzy PID Controllerthhluong.sdh232No ratings yet
- Sciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotDocument8 pagesSciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotĐức QuangNo ratings yet
- Prediction and Enhancement of Power System Transient Stability Using Taylor SeriesDocument7 pagesPrediction and Enhancement of Power System Transient Stability Using Taylor SeriesOladeji Ifedayo RNo ratings yet
- Research Article: DC Motor Parameter Identification Using Speed Step ResponsesDocument5 pagesResearch Article: DC Motor Parameter Identification Using Speed Step ResponsesDawn VargasNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Von InternetDocument15 pagesVon InternetPinaki SankarNo ratings yet
- Sol at Engineering Mechanics Statics and Dynamics ShamesDocument1,440 pagesSol at Engineering Mechanics Statics and Dynamics ShamesPinaki SankarNo ratings yet
- CHP 6Document18 pagesCHP 6Pinaki SankarNo ratings yet
- 2nd Year - IT - Sc2 - ItDocument334 pages2nd Year - IT - Sc2 - ItPinaki SankarNo ratings yet
- CHP 3Document21 pagesCHP 3Pinaki SankarNo ratings yet
- CHP 5Document24 pagesCHP 5Pinaki SankarNo ratings yet
- 1133 Overview GermanyDocument17 pages1133 Overview GermanyPinaki SankarNo ratings yet
- 3 - Module 6Document20 pages3 - Module 6Pinaki SankarNo ratings yet
- Metrology NotesDocument50 pagesMetrology NotesPinaki SankarNo ratings yet
- DTC E Brochure 2015 16Document29 pagesDTC E Brochure 2015 16Kirat SinghNo ratings yet
- Applying Intuitive ThinkingDocument9 pagesApplying Intuitive ThinkingKaren Mae Sibal0% (1)
- 1 A. - ELC II - UNIT 6 - READING 1Document4 pages1 A. - ELC II - UNIT 6 - READING 1Yuliana PaezNo ratings yet
- Astm D 4438Document3 pagesAstm D 4438Alvaro HernandezNo ratings yet
- Detailed Lesson PlanDocument2 pagesDetailed Lesson PlanJoie OsherNo ratings yet
- Time ClockDocument21 pagesTime ClockMarvin BrunoNo ratings yet
- ECEN 615 Methods of Electric Power Systems Analysis: Lecture 19: Equivalents, Voltage StabilityDocument35 pagesECEN 615 Methods of Electric Power Systems Analysis: Lecture 19: Equivalents, Voltage StabilityMohamed ShamseldeinNo ratings yet
- Practical Exercise 3 Pareto Diagram: DR Yousef Amer - School of Engineering University of South Australia Page 1 of 3Document6 pagesPractical Exercise 3 Pareto Diagram: DR Yousef Amer - School of Engineering University of South Australia Page 1 of 3HarisNo ratings yet
- SyllabusDocument143 pagesSyllabusAmbhika GurusamyNo ratings yet
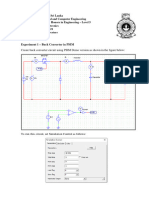
- Eex5453 Lab02 2020-2021Document5 pagesEex5453 Lab02 2020-2021amilapradeepsarangaNo ratings yet
- The Economic Life of Project Is An Asset From The Angle of Maximization of The Project ValueDocument12 pagesThe Economic Life of Project Is An Asset From The Angle of Maximization of The Project ValueUjjwal KheriaNo ratings yet
- Joseph Kikwa Misonzo - Hydrogeological Survey ReportDocument19 pagesJoseph Kikwa Misonzo - Hydrogeological Survey ReportNajmudeen IbrahimNo ratings yet
- N Forgings Energy Audit Final ReportDocument21 pagesN Forgings Energy Audit Final Reportbulusu kanthNo ratings yet
- Educ 11 - Unit 2 The Learners Development EnvironmentDocument7 pagesEduc 11 - Unit 2 The Learners Development EnvironmentJoan RamosNo ratings yet
- I PUC PHysics Practical Viva QuestionsDocument3 pagesI PUC PHysics Practical Viva QuestionsNarasimha Murthy100% (1)
- Đề Minh Họa 2020 Số 33 - GV Trang Anh - Moon.vnDocument12 pagesĐề Minh Họa 2020 Số 33 - GV Trang Anh - Moon.vnLưu Lê Minh HạNo ratings yet
- Ferodo Motorcycle Catalogue FrenosDocument752 pagesFerodo Motorcycle Catalogue Frenospedro9494No ratings yet
- Seminar Individual DifferencesDocument4 pagesSeminar Individual DifferencesMiha Şi AtâtNo ratings yet
- UGEE Course Brochure 2024 - CompressedDocument9 pagesUGEE Course Brochure 2024 - CompressedShradha ReddyNo ratings yet
- Kenneth Steele ResumeDocument1 pageKenneth Steele Resumeapi-341433729No ratings yet
- 雪国列车Document2 pages雪国列车Cecilia ZhangNo ratings yet
- Gonalons Pons Ronen 2019 Sexist Cheap ShotsDocument2 pagesGonalons Pons Ronen 2019 Sexist Cheap ShotsPapa K Nla E.No ratings yet
- Rule of InferenceDocument70 pagesRule of InferenceHarshitha DeviNo ratings yet
- Controller Design For Temperature Control of Heat Exchanger System: Simulation StudiesDocument8 pagesController Design For Temperature Control of Heat Exchanger System: Simulation StudiesJhoanaNo ratings yet
- Department of Education: Republic of The PhilippinesDocument12 pagesDepartment of Education: Republic of The PhilippinesmarebeccaNo ratings yet
- Guidelines For Keeping Laboratory NotebooksDocument13 pagesGuidelines For Keeping Laboratory NotebooksBhavya NarangNo ratings yet
- Prediction of Blade Life Cycle For An Industrial GDocument18 pagesPrediction of Blade Life Cycle For An Industrial GffazlaliNo ratings yet
- Test Bank For Learning Mobile App Development A Hands On Guide To Building Apps With Ios and Android 032194786xDocument22 pagesTest Bank For Learning Mobile App Development A Hands On Guide To Building Apps With Ios and Android 032194786xhydatidzonal4zm7z100% (42)