Download as pdf or txt
You might also like
- Total Productive MaintenanceDocument57 pagesTotal Productive MaintenanceUsman ShahzadNo ratings yet
- Gagne's Conditions of LearningDocument3 pagesGagne's Conditions of LearningCza Mae ArsenalNo ratings yet
- Mg623 - Project Management PlanDocument79 pagesMg623 - Project Management PlanIBRAHIM NYIRENDANo ratings yet
- RULA AssessmentDocument1 pageRULA AssessmentmckeeverbrianNo ratings yet
- Poster Mustafa KonukR2Document1 pagePoster Mustafa KonukR2Ansar LawiNo ratings yet
- Earth-And-Life-Science-G11-Whlp-Week-1-2 - Quarter 2 HeDocument2 pagesEarth-And-Life-Science-G11-Whlp-Week-1-2 - Quarter 2 Hecristina maquinto100% (5)
- GSD - Session 1&2 - Sanjoy PDFDocument20 pagesGSD - Session 1&2 - Sanjoy PDFBurning HellNo ratings yet
- Importance of Process Safety Testing For Identifying Chemical Reactions HazardsDocument60 pagesImportance of Process Safety Testing For Identifying Chemical Reactions HazardsSarsuhNo ratings yet
- 7 QC ToolsDocument21 pages7 QC Toolsrakeshkumar20No ratings yet
- Reba Analysis TemplateDocument5 pagesReba Analysis TemplateJC RivNo ratings yet
- Design Review Acceptance RecordDocument3 pagesDesign Review Acceptance Recordteseoguerra100% (1)
- 3021 - 07 Predetermined Time SystemsDocument37 pages3021 - 07 Predetermined Time Systemssunilkjain6105100% (1)
- S-MatrixDocument8 pagesS-MatrixkhktvnNo ratings yet
- MTM NotesDocument5 pagesMTM NotesCristel GajeNo ratings yet
- How To Do Focuses ImprovementDocument39 pagesHow To Do Focuses Improvementashutoshpal21No ratings yet
- 12 Tools To Make Waste VisibleDocument37 pages12 Tools To Make Waste VisibleMichael WuNo ratings yet
- Method Time MeasurementDocument24 pagesMethod Time MeasurementEvita Nuriya RNo ratings yet
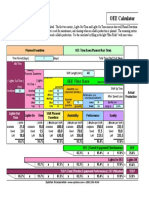
- OEE CalculationDocument2 pagesOEE CalculationSudhaNo ratings yet
- Lean Six Sigma Green Belt Certification Course: Business Results For Projects Part - 1Document69 pagesLean Six Sigma Green Belt Certification Course: Business Results For Projects Part - 1Rajkumar VijNo ratings yet
- Plant: Truck Factory: Kaizen Idea - Sheet Machine No: 5000T PressDocument1 pagePlant: Truck Factory: Kaizen Idea - Sheet Machine No: 5000T PressMoufuja ChowdhuryNo ratings yet
- 3.1 Work Measurement - Time Study - W4 PDFDocument28 pages3.1 Work Measurement - Time Study - W4 PDFAjwad HaziqNo ratings yet
- 07 - Chapter 4 - PullDocument26 pages07 - Chapter 4 - PullYen NguyenNo ratings yet
- Lean Six Sigma - 20021241093 - 20021241095 - 20021241128 - PPTDocument16 pagesLean Six Sigma - 20021241093 - 20021241095 - 20021241128 - PPTRohit SatijaNo ratings yet
- MODAPTS NotesDocument10 pagesMODAPTS NotesCarlosKentNo ratings yet
- Operation BreakdownDocument21 pagesOperation BreakdownNikita JainNo ratings yet
- HW 2 CoraDocument1 pageHW 2 Coraapi-266881154No ratings yet
- OEE Calculator - Sylution - 2010 - 01 - 21Document1 pageOEE Calculator - Sylution - 2010 - 01 - 21metugaNo ratings yet
- Six Sigma: Statistically Visualized: Lower Spec. Limit Upper Spec. LimitDocument6 pagesSix Sigma: Statistically Visualized: Lower Spec. Limit Upper Spec. Limitjfernandoa01No ratings yet
- Vent. WorksheetDocument3 pagesVent. WorksheetjldriggersNo ratings yet
- 5 WhyDocument13 pages5 WhyPeter SzógaNo ratings yet
- Lean Manufacturing in Process IndustriesDocument23 pagesLean Manufacturing in Process IndustriesdrustagiNo ratings yet
- Cost-Machine Shop Mar-15 (Ram-Assy)Document7 pagesCost-Machine Shop Mar-15 (Ram-Assy)azadsingh1No ratings yet
- FYP PosterDocument1 pageFYP PosterMuhammad HassanNo ratings yet
- Value Stream Mapping, 5S& Visual ManagementDocument58 pagesValue Stream Mapping, 5S& Visual ManagementShrishti GuptaNo ratings yet
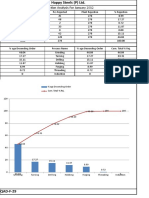
- Rejection Analysis For January 2012: % Age Desending Order Cum. Total % RejDocument7 pagesRejection Analysis For January 2012: % Age Desending Order Cum. Total % RejazadNo ratings yet
- Process/Product Name: Prepared By: Responsible: FMEA Date (Orig.) : (Rev.)Document18 pagesProcess/Product Name: Prepared By: Responsible: FMEA Date (Orig.) : (Rev.)Alper GmNo ratings yet
- Dpmo CalculatorDocument9 pagesDpmo Calculatorramani_balakrishNo ratings yet
- FMEADocument20 pagesFMEARonillo PormonNo ratings yet
- Kaizen PF6Document10 pagesKaizen PF6Jeniffer RayenNo ratings yet
- Smed Training: Instructions On How To Perform A SMED KaizenDocument45 pagesSmed Training: Instructions On How To Perform A SMED KaizenDhruval DaveNo ratings yet
- A Case Study: Application of Basicmost in A Lock'S AssemblyDocument7 pagesA Case Study: Application of Basicmost in A Lock'S AssemblysunitmhasadeNo ratings yet
- OEE Explained PDFDocument3 pagesOEE Explained PDFcarrot123456No ratings yet
- Six Sigma Control PDFDocument74 pagesSix Sigma Control PDFnaacha457No ratings yet
- Basic 5SDocument117 pagesBasic 5SPrasad PrinceNo ratings yet
- Failure Mode and Effect AnalysisDocument25 pagesFailure Mode and Effect AnalysislokelooksNo ratings yet
- 8D - Problem Resolution Report: Governor Cover JCB-310 28214705 28214705Document4 pages8D - Problem Resolution Report: Governor Cover JCB-310 28214705 28214705Puneet SharmaNo ratings yet
- TPM Steps 1 JHDocument10 pagesTPM Steps 1 JHGyanesh_DBNo ratings yet
- Responsible Care Management System Basic Training: BD-QM-CMO-ALL-C01-L2-P03-N07Document47 pagesResponsible Care Management System Basic Training: BD-QM-CMO-ALL-C01-L2-P03-N07Bima100% (1)
- Promblem Solving Combined March 2017 AnelleDocument25 pagesPromblem Solving Combined March 2017 AnelleSravan DasariNo ratings yet
- OEE Januari 2021Document292 pagesOEE Januari 2021bimaNo ratings yet
- Rejection Analysis 2022Document2 pagesRejection Analysis 2022Iqbal singh DhanjalNo ratings yet
- STROKE Is An Emergency.: Every Minute CountsDocument5 pagesSTROKE Is An Emergency.: Every Minute CountsNeesieCullenGakciuttapidbuNo ratings yet
- Problem Solving With Data Structures Using Java: A Multimedia ApproachDocument79 pagesProblem Solving With Data Structures Using Java: A Multimedia ApproachJoswa CaxtonNo ratings yet
- The "5S" Philosophy: G. Lakshmi NarayananDocument51 pagesThe "5S" Philosophy: G. Lakshmi NarayanananbarasanNo ratings yet
- 080523-Answers To Safety Test (6pag)Document6 pages080523-Answers To Safety Test (6pag)Gonzalo MazaNo ratings yet
- Waste EliminationDocument31 pagesWaste Eliminationaarun01No ratings yet
- Kaizen Report ExampleDocument1 pageKaizen Report ExampleShreyasNo ratings yet
- Control Chart GraphDocument18 pagesControl Chart Graphapi-3852736100% (1)
- SPCDocument49 pagesSPCJosephi_abbasNo ratings yet
- Slow Down Switch AND ROPINGDocument30 pagesSlow Down Switch AND ROPINGEtienneNo ratings yet
- SAAMI Z299.3-2022 - CFP&R Ammunition 9mmDocument1 pageSAAMI Z299.3-2022 - CFP&R Ammunition 9mmLeandro Campos RosaNo ratings yet
- Bridon Dyform 34LR & 34LR PIDocument1 pageBridon Dyform 34LR & 34LR PIMardianNo ratings yet
- Excel CalculationsDocument3 pagesExcel CalculationsBenNo ratings yet
- Wu.89083913384-Seq - 61 (10 Files Merged)Document16 pagesWu.89083913384-Seq - 61 (10 Files Merged)imrannila910No ratings yet
- Slide 1Document3 pagesSlide 1imrannila910No ratings yet
- PTS SamDocument27 pagesPTS Samimrannila910No ratings yet
- Therbligs Are A Set of 18 Basic Elemental Motions or Actions That Can Be Used To Analyze and Improve Manual Work ProcessesDocument2 pagesTherbligs Are A Set of 18 Basic Elemental Motions or Actions That Can Be Used To Analyze and Improve Manual Work Processesimrannila910No ratings yet
- TherbligDocument23 pagesTherbligimrannila910No ratings yet
- A. M. Law, W. D. Kelton - Simulation Modeling and Analysis-McGraw-HillDocument155 pagesA. M. Law, W. D. Kelton - Simulation Modeling and Analysis-McGraw-Hillita farista100% (1)
- Havells PumpsDocument8 pagesHavells PumpsNAVEEN JATNo ratings yet
- B.Tech.: RAS-103 RAS - 103Document11 pagesB.Tech.: RAS-103 RAS - 103Tushar Saxena100% (1)
- Toray TM810 Sea Water RO Element LDocument2 pagesToray TM810 Sea Water RO Element LMohamad JammalNo ratings yet
- Single Cell AnalysisDocument22 pagesSingle Cell AnalysisJonathan MilhomensNo ratings yet
- Training and Development: 06/30/2022 HRM Chapter 5 - Truong Nu To Giang 1Document54 pagesTraining and Development: 06/30/2022 HRM Chapter 5 - Truong Nu To Giang 1Trần LuânNo ratings yet
- Master in Aerospace Engineering: Ecole Centrale LyonDocument20 pagesMaster in Aerospace Engineering: Ecole Centrale LyonThangjam ShagerNo ratings yet
- Environmental Impact Assessment Report!Document4 pagesEnvironmental Impact Assessment Report!Jean TraquiñaNo ratings yet
- Why Developmentally Appropriate Practice (Dap) Is Important in KindergartenDocument10 pagesWhy Developmentally Appropriate Practice (Dap) Is Important in KindergartenJoy MoranoNo ratings yet
- Caving AnalysisDocument20 pagesCaving Analysisc_b_umashankarNo ratings yet
- System Identification ThesisDocument5 pagesSystem Identification Thesisjpcbobkef100% (2)
- Ped 1 Group 2Document42 pagesPed 1 Group 2Ana Marie GonzalesNo ratings yet
- 25 04 2017 Senate Members List FinalDocument30 pages25 04 2017 Senate Members List FinalKumar JkNo ratings yet
- Constructing Basestations July27 RanjithDocument6 pagesConstructing Basestations July27 RanjithAkash MahalikNo ratings yet
- Demonstration Teaching Lesson Plan On Visual Verbal RELATIONSHIP For Grade 8Document8 pagesDemonstration Teaching Lesson Plan On Visual Verbal RELATIONSHIP For Grade 8Rochelle Ann SaguirreNo ratings yet
- Specific Heat Capacities WorksheetDocument2 pagesSpecific Heat Capacities WorksheetRebeca RiveraNo ratings yet
- Why Use Analysis Up-Front in The Design Cycle?: CosmosDocument8 pagesWhy Use Analysis Up-Front in The Design Cycle?: CosmosRoshni BishtNo ratings yet
- Sanitary Fittings Best PracticesDocument8 pagesSanitary Fittings Best PracticesAbraham GarciaNo ratings yet
- Types of Speech Context-HandoutDocument2 pagesTypes of Speech Context-HandoutMelissa Joy BenlotNo ratings yet
- Aesop Sustainability Report 2021 1670404443Document33 pagesAesop Sustainability Report 2021 1670404443eNo ratings yet
- MC74VHC00 D-2315589Document9 pagesMC74VHC00 D-2315589rajabur688No ratings yet
- Overleaf Amsl Package PDFDocument44 pagesOverleaf Amsl Package PDFBruce LimNo ratings yet
- What's New SampleDocument19 pagesWhat's New SampleAmaanJo0No ratings yet
- CFDLV13 N12 P32 44Document13 pagesCFDLV13 N12 P32 44Rahmat Azis NabawiNo ratings yet
- Emf Values of Organic CompoundsDocument34 pagesEmf Values of Organic CompoundsPrabir SahaNo ratings yet
- How To Design An Innovative WorkplaceDocument2 pagesHow To Design An Innovative WorkplacemuskanNo ratings yet
- Motivation: Archit GuptaDocument19 pagesMotivation: Archit GuptaArchit GuptaNo ratings yet