
2022 Iitb Ae 410 641 16
2022 Iitb Ae 410 641 16
You might also like
- Tle - Food Processing 8: Division of City of San FernandoDocument43 pagesTle - Food Processing 8: Division of City of San FernandoJoanne Manlises100% (7)
- Ewm Production IntegrationDocument78 pagesEwm Production IntegrationDipak BanerjeeNo ratings yet
- Geometric Design of Highways: Tewodros NDocument36 pagesGeometric Design of Highways: Tewodros NPs Potchi ReddyNo ratings yet
- Directional Cosine MatricesDocument6 pagesDirectional Cosine MatricesvkkabraNo ratings yet
- 2022 Iitb Ae 410 641 17Document25 pages2022 Iitb Ae 410 641 17200010034No ratings yet
- 2022 Iitb Ae 410 641 18Document37 pages2022 Iitb Ae 410 641 18200010034No ratings yet
- 2022 Iitb Ae 410 641 19Document40 pages2022 Iitb Ae 410 641 19200010034No ratings yet
- Engagement Two PointDocument6 pagesEngagement Two PointRISHABH JAMBHULKARNo ratings yet
- Planar Kinematics of A Rigid BodyDocument74 pagesPlanar Kinematics of A Rigid BodymarcosbispolimaNo ratings yet
- Unit4 PDFDocument89 pagesUnit4 PDFSahmi Abdulqahar NizoriNo ratings yet
- Circular BeamDocument24 pagesCircular BeamSyed Sikandar ShahNo ratings yet
- RTTDocument2 pagesRTTKumar AmanNo ratings yet
- PhysicsDocument11 pagesPhysicsChool Cydrick B. BascosNo ratings yet
- 1. CIRCULAR MOTIONDocument6 pages1. CIRCULAR MOTIONwellington sigaukeNo ratings yet
- CH 14-2 - Complex NumbersDocument38 pagesCH 14-2 - Complex NumbersffyyfrNo ratings yet
- Guidance and Control of Unmanned Autonomous Vehicles: Shashi Ranjan KumarDocument35 pagesGuidance and Control of Unmanned Autonomous Vehicles: Shashi Ranjan KumarPrìyañshú GuptãNo ratings yet
- Special Theory of RelativityDocument52 pagesSpecial Theory of RelativityAnik100% (8)
- ME114 Dynamics - Lec 3 - Particle Kinematics - Curvilinear MotionDocument37 pagesME114 Dynamics - Lec 3 - Particle Kinematics - Curvilinear MotionSharique ImamNo ratings yet
- Chapter 6 Ap PhysicsDocument16 pagesChapter 6 Ap Physicsapi-664002484No ratings yet
- Banking of RoadDocument25 pagesBanking of RoadmohammadhamidakhlaqueNo ratings yet
- Announcements: Announcements: Announcements AnnouncementsDocument11 pagesAnnouncements: Announcements: Announcements AnnouncementsazureusNo ratings yet
- 2019 PHY Advanced Mechanics Electromagnetism Nature of Light and From The Universe To The Atom NotesDocument52 pages2019 PHY Advanced Mechanics Electromagnetism Nature of Light and From The Universe To The Atom Notesmariamarsbar17No ratings yet
- Sinusoidal Steady State AnalysisDocument20 pagesSinusoidal Steady State AnalysisabhishekbsikarNo ratings yet
- Paper 2Document4 pagesPaper 2Yessica RosasNo ratings yet
- Lecture 13Document27 pagesLecture 13dewanshu soniNo ratings yet
- CES522 A 02 - Topic 2a - 3. ShearDocument7 pagesCES522 A 02 - Topic 2a - 3. ShearAizuddinNo ratings yet
- Section 4 3 The Scattering Matrix PackageDocument103 pagesSection 4 3 The Scattering Matrix Packageyogisingh69No ratings yet
- 2024 IITB AE 410 Lec12Document26 pages2024 IITB AE 410 Lec12Hanu BhaiNo ratings yet
- M435 Chapter 5 GeodesicsDocument8 pagesM435 Chapter 5 GeodesicsNithya SridharNo ratings yet
- Chapter - 6: Ac Fundamentals (Network) : DV DTDocument12 pagesChapter - 6: Ac Fundamentals (Network) : DV DTHassan SayedNo ratings yet
- Soal KecepatanDocument14 pagesSoal Kecepatanriyantrin_552787272No ratings yet
- Traverse Survey: Mushairry Mustaffar UTMJB 1Document33 pagesTraverse Survey: Mushairry Mustaffar UTMJB 1laxmi narayananNo ratings yet
- Handout6.2-Doppler Shift DerivationDocument3 pagesHandout6.2-Doppler Shift DerivationHan hoNo ratings yet
- CH 15-1 - Series and Parallel Ac CircuitsDocument34 pagesCH 15-1 - Series and Parallel Ac CircuitsffyyfrNo ratings yet
- Part 17Document6 pagesPart 17Kerlos SaeedNo ratings yet
- Day 05Document9 pagesDay 05g.sathyanarayanan252008No ratings yet
- Circular Motion 1 2022Document28 pagesCircular Motion 1 2022Harper IrwinNo ratings yet
- Aero - Lect8 - 2019 (1) Take Off Aircraft Stability and PerformanceDocument14 pagesAero - Lect8 - 2019 (1) Take Off Aircraft Stability and PerformanceAftab AliNo ratings yet
- Rain PDFDocument7 pagesRain PDFSaikat BanerjeeNo ratings yet
- Lab 5 Ballistic PendulumDocument6 pagesLab 5 Ballistic PendulumJaimukeshNo ratings yet
- 9.traversing (Theodolite)Document25 pages9.traversing (Theodolite)Mercy SimangoNo ratings yet
- Civ205 CA SolDocument2 pagesCiv205 CA SolGable SmithNo ratings yet
- (L3) - (JLD 2.0) - Circular Motion - 21st September.Document57 pages(L3) - (JLD 2.0) - Circular Motion - 21st September.mohammadhamidakhlaqueNo ratings yet
- Path Following Mobile Robot in The Presence of Velocity ConstraintsDocument12 pagesPath Following Mobile Robot in The Presence of Velocity ConstraintsmonikNo ratings yet
- 1.0 Wrap Up and SummaryDocument4 pages1.0 Wrap Up and SummaryGian SanchezNo ratings yet
- Cmos Inverter PDFDocument7 pagesCmos Inverter PDFvinod_patil13No ratings yet
- Cmos InverterDocument7 pagesCmos Invertervinod_patil13No ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- Flashcards - 4.1 Further Mechanics - Edexcel IAL Physics a-levelDocument25 pagesFlashcards - 4.1 Further Mechanics - Edexcel IAL Physics a-levelSabreen ElahiNo ratings yet
- Skeletonization Using SSM of The Distance TransformDocument4 pagesSkeletonization Using SSM of The Distance TransformAryan SisodiaNo ratings yet
- Design of Circular BeamsDocument24 pagesDesign of Circular Beamscomandos882010100% (2)
- Lecture 14+16marchDocument35 pagesLecture 14+16marchAd EverythingNo ratings yet
- Choice of Suitable Coordinate System: Curvilinear CoordinatesDocument15 pagesChoice of Suitable Coordinate System: Curvilinear Coordinatespetrified pixelNo ratings yet
- M11 Wolf57139 03 Se C11Document25 pagesM11 Wolf57139 03 Se C11c.s.kalkmanNo ratings yet
- 11 Chapter3Document46 pages11 Chapter3Anonymous wAdxNydjNo ratings yet
- Fluid 06Document140 pagesFluid 06Edgar HuancaNo ratings yet
- Act Pre Mad Gtoc1 MaiDocument30 pagesAct Pre Mad Gtoc1 MaiminnntheinNo ratings yet
- Rain Problem: Relative MotionDocument2 pagesRain Problem: Relative MotionNikhil UpadhyayNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Bockman, Johanna (2013) NeoliberalismDocument3 pagesBockman, Johanna (2013) NeoliberalismJosh VeigaNo ratings yet
- PS GrammarDocument3 pagesPS GrammarMastermind SunnyNo ratings yet
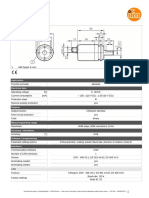
- Multiturn Solid Shaft Encoder: 1 M4 Depth 6 MMDocument2 pagesMultiturn Solid Shaft Encoder: 1 M4 Depth 6 MMSoha EzzaldenNo ratings yet
- IGF Code WorkbookDocument9 pagesIGF Code WorkbookGiby JohnNo ratings yet
- Presented By-Anshul Kumbhare Siddhant Mhatre: Boiler AccessoriesDocument10 pagesPresented By-Anshul Kumbhare Siddhant Mhatre: Boiler AccessoriesHarshvardhan Singh ChauhanNo ratings yet
- DK Selling StrategiesDocument7 pagesDK Selling StrategiesMilan DzigurskiNo ratings yet
- Art Meta-Analyses of Experimental Data in An PDFDocument12 pagesArt Meta-Analyses of Experimental Data in An PDFIonela HoteaNo ratings yet
- Korean WaveDocument12 pagesKorean WaveJm PogiNo ratings yet
- U.S. Department of Transportation National Highway Traffic Safety AdministrationDocument39 pagesU.S. Department of Transportation National Highway Traffic Safety AdministrationDiego MontanezNo ratings yet
- Grade 9 Social Studies Textbook CbseDocument3 pagesGrade 9 Social Studies Textbook CbseKurtNo ratings yet
- A. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGDocument143 pagesA. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGRyan Togonon100% (1)
- 7SG18 - Solkor N Complete Technical Manual PDFDocument154 pages7SG18 - Solkor N Complete Technical Manual PDFmonikaNo ratings yet
- RESMETH Instructors ManualDocument32 pagesRESMETH Instructors ManualportucasbasNo ratings yet
- Hamsters and Their OffspringDocument3 pagesHamsters and Their OffspringClaire FarronNo ratings yet
- 5.5 CBM Waste Skip Open Top - POWER BearDocument1 page5.5 CBM Waste Skip Open Top - POWER Bearqtia71133No ratings yet
- The Paper Airplane GameDocument5 pagesThe Paper Airplane GamegoonygoogooNo ratings yet
- InternationalDocument11 pagesInternationalVijaya SethiNo ratings yet
- Element Main - JsDocument51 pagesElement Main - JsjaaritNo ratings yet
- On Annemarie Mols The Body MultipleDocument4 pagesOn Annemarie Mols The Body MultipleMAGALY GARCIA RINCONNo ratings yet
- Portfolio in My Immersion Work 2.0Document41 pagesPortfolio in My Immersion Work 2.0floreson 16No ratings yet
- Ch. 9 Sampling Distributions and Confidence Intervals For ProportionsDocument22 pagesCh. 9 Sampling Distributions and Confidence Intervals For ProportionsThanh PhamNo ratings yet
- Yamaha Nmax Smart Key SystemDocument1 pageYamaha Nmax Smart Key Systemmotley crewzNo ratings yet
- Suppliers Assessment ChecklistDocument3 pagesSuppliers Assessment ChecklistRonnel LeanoNo ratings yet
- E-Learning Tender RFPDocument41 pagesE-Learning Tender RFPnaidu naga nareshNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/31Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/31Erdoğan ŞahinNo ratings yet
- Hindustan Lever: Case 15-4Document11 pagesHindustan Lever: Case 15-4anilnair88100% (1)
- Q2 English 2 Week 7 Module 7 Sequencing of EventsDocument27 pagesQ2 English 2 Week 7 Module 7 Sequencing of EventsGrapes Lyn EstrellaNo ratings yet
- 5th Ed Ch02 QCDocument6 pages5th Ed Ch02 QCmohanNo ratings yet





















































































Download as pdf or txt
You might also like
- Tle - Food Processing 8: Division of City of San FernandoDocument43 pagesTle - Food Processing 8: Division of City of San FernandoJoanne Manlises100% (7)
- Ewm Production IntegrationDocument78 pagesEwm Production IntegrationDipak BanerjeeNo ratings yet
- Geometric Design of Highways: Tewodros NDocument36 pagesGeometric Design of Highways: Tewodros NPs Potchi ReddyNo ratings yet
- Directional Cosine MatricesDocument6 pagesDirectional Cosine MatricesvkkabraNo ratings yet
- 2022 Iitb Ae 410 641 17Document25 pages2022 Iitb Ae 410 641 17200010034No ratings yet
- 2022 Iitb Ae 410 641 18Document37 pages2022 Iitb Ae 410 641 18200010034No ratings yet
- 2022 Iitb Ae 410 641 19Document40 pages2022 Iitb Ae 410 641 19200010034No ratings yet
- Engagement Two PointDocument6 pagesEngagement Two PointRISHABH JAMBHULKARNo ratings yet
- Planar Kinematics of A Rigid BodyDocument74 pagesPlanar Kinematics of A Rigid BodymarcosbispolimaNo ratings yet
- Unit4 PDFDocument89 pagesUnit4 PDFSahmi Abdulqahar NizoriNo ratings yet
- Circular BeamDocument24 pagesCircular BeamSyed Sikandar ShahNo ratings yet
- RTTDocument2 pagesRTTKumar AmanNo ratings yet
- PhysicsDocument11 pagesPhysicsChool Cydrick B. BascosNo ratings yet
- 1. CIRCULAR MOTIONDocument6 pages1. CIRCULAR MOTIONwellington sigaukeNo ratings yet
- CH 14-2 - Complex NumbersDocument38 pagesCH 14-2 - Complex NumbersffyyfrNo ratings yet
- Guidance and Control of Unmanned Autonomous Vehicles: Shashi Ranjan KumarDocument35 pagesGuidance and Control of Unmanned Autonomous Vehicles: Shashi Ranjan KumarPrìyañshú GuptãNo ratings yet
- Special Theory of RelativityDocument52 pagesSpecial Theory of RelativityAnik100% (8)
- ME114 Dynamics - Lec 3 - Particle Kinematics - Curvilinear MotionDocument37 pagesME114 Dynamics - Lec 3 - Particle Kinematics - Curvilinear MotionSharique ImamNo ratings yet
- Chapter 6 Ap PhysicsDocument16 pagesChapter 6 Ap Physicsapi-664002484No ratings yet
- Banking of RoadDocument25 pagesBanking of RoadmohammadhamidakhlaqueNo ratings yet
- Announcements: Announcements: Announcements AnnouncementsDocument11 pagesAnnouncements: Announcements: Announcements AnnouncementsazureusNo ratings yet
- 2019 PHY Advanced Mechanics Electromagnetism Nature of Light and From The Universe To The Atom NotesDocument52 pages2019 PHY Advanced Mechanics Electromagnetism Nature of Light and From The Universe To The Atom Notesmariamarsbar17No ratings yet
- Sinusoidal Steady State AnalysisDocument20 pagesSinusoidal Steady State AnalysisabhishekbsikarNo ratings yet
- Paper 2Document4 pagesPaper 2Yessica RosasNo ratings yet
- Lecture 13Document27 pagesLecture 13dewanshu soniNo ratings yet
- CES522 A 02 - Topic 2a - 3. ShearDocument7 pagesCES522 A 02 - Topic 2a - 3. ShearAizuddinNo ratings yet
- Section 4 3 The Scattering Matrix PackageDocument103 pagesSection 4 3 The Scattering Matrix Packageyogisingh69No ratings yet
- 2024 IITB AE 410 Lec12Document26 pages2024 IITB AE 410 Lec12Hanu BhaiNo ratings yet
- M435 Chapter 5 GeodesicsDocument8 pagesM435 Chapter 5 GeodesicsNithya SridharNo ratings yet
- Chapter - 6: Ac Fundamentals (Network) : DV DTDocument12 pagesChapter - 6: Ac Fundamentals (Network) : DV DTHassan SayedNo ratings yet
- Soal KecepatanDocument14 pagesSoal Kecepatanriyantrin_552787272No ratings yet
- Traverse Survey: Mushairry Mustaffar UTMJB 1Document33 pagesTraverse Survey: Mushairry Mustaffar UTMJB 1laxmi narayananNo ratings yet
- Handout6.2-Doppler Shift DerivationDocument3 pagesHandout6.2-Doppler Shift DerivationHan hoNo ratings yet
- CH 15-1 - Series and Parallel Ac CircuitsDocument34 pagesCH 15-1 - Series and Parallel Ac CircuitsffyyfrNo ratings yet
- Part 17Document6 pagesPart 17Kerlos SaeedNo ratings yet
- Day 05Document9 pagesDay 05g.sathyanarayanan252008No ratings yet
- Circular Motion 1 2022Document28 pagesCircular Motion 1 2022Harper IrwinNo ratings yet
- Aero - Lect8 - 2019 (1) Take Off Aircraft Stability and PerformanceDocument14 pagesAero - Lect8 - 2019 (1) Take Off Aircraft Stability and PerformanceAftab AliNo ratings yet
- Rain PDFDocument7 pagesRain PDFSaikat BanerjeeNo ratings yet
- Lab 5 Ballistic PendulumDocument6 pagesLab 5 Ballistic PendulumJaimukeshNo ratings yet
- 9.traversing (Theodolite)Document25 pages9.traversing (Theodolite)Mercy SimangoNo ratings yet
- Civ205 CA SolDocument2 pagesCiv205 CA SolGable SmithNo ratings yet
- (L3) - (JLD 2.0) - Circular Motion - 21st September.Document57 pages(L3) - (JLD 2.0) - Circular Motion - 21st September.mohammadhamidakhlaqueNo ratings yet
- Path Following Mobile Robot in The Presence of Velocity ConstraintsDocument12 pagesPath Following Mobile Robot in The Presence of Velocity ConstraintsmonikNo ratings yet
- 1.0 Wrap Up and SummaryDocument4 pages1.0 Wrap Up and SummaryGian SanchezNo ratings yet
- Cmos Inverter PDFDocument7 pagesCmos Inverter PDFvinod_patil13No ratings yet
- Cmos InverterDocument7 pagesCmos Invertervinod_patil13No ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- Flashcards - 4.1 Further Mechanics - Edexcel IAL Physics a-levelDocument25 pagesFlashcards - 4.1 Further Mechanics - Edexcel IAL Physics a-levelSabreen ElahiNo ratings yet
- Skeletonization Using SSM of The Distance TransformDocument4 pagesSkeletonization Using SSM of The Distance TransformAryan SisodiaNo ratings yet
- Design of Circular BeamsDocument24 pagesDesign of Circular Beamscomandos882010100% (2)
- Lecture 14+16marchDocument35 pagesLecture 14+16marchAd EverythingNo ratings yet
- Choice of Suitable Coordinate System: Curvilinear CoordinatesDocument15 pagesChoice of Suitable Coordinate System: Curvilinear Coordinatespetrified pixelNo ratings yet
- M11 Wolf57139 03 Se C11Document25 pagesM11 Wolf57139 03 Se C11c.s.kalkmanNo ratings yet
- 11 Chapter3Document46 pages11 Chapter3Anonymous wAdxNydjNo ratings yet
- Fluid 06Document140 pagesFluid 06Edgar HuancaNo ratings yet
- Act Pre Mad Gtoc1 MaiDocument30 pagesAct Pre Mad Gtoc1 MaiminnntheinNo ratings yet
- Rain Problem: Relative MotionDocument2 pagesRain Problem: Relative MotionNikhil UpadhyayNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Bockman, Johanna (2013) NeoliberalismDocument3 pagesBockman, Johanna (2013) NeoliberalismJosh VeigaNo ratings yet
- PS GrammarDocument3 pagesPS GrammarMastermind SunnyNo ratings yet
- Multiturn Solid Shaft Encoder: 1 M4 Depth 6 MMDocument2 pagesMultiturn Solid Shaft Encoder: 1 M4 Depth 6 MMSoha EzzaldenNo ratings yet
- IGF Code WorkbookDocument9 pagesIGF Code WorkbookGiby JohnNo ratings yet
- Presented By-Anshul Kumbhare Siddhant Mhatre: Boiler AccessoriesDocument10 pagesPresented By-Anshul Kumbhare Siddhant Mhatre: Boiler AccessoriesHarshvardhan Singh ChauhanNo ratings yet
- DK Selling StrategiesDocument7 pagesDK Selling StrategiesMilan DzigurskiNo ratings yet
- Art Meta-Analyses of Experimental Data in An PDFDocument12 pagesArt Meta-Analyses of Experimental Data in An PDFIonela HoteaNo ratings yet
- Korean WaveDocument12 pagesKorean WaveJm PogiNo ratings yet
- U.S. Department of Transportation National Highway Traffic Safety AdministrationDocument39 pagesU.S. Department of Transportation National Highway Traffic Safety AdministrationDiego MontanezNo ratings yet
- Grade 9 Social Studies Textbook CbseDocument3 pagesGrade 9 Social Studies Textbook CbseKurtNo ratings yet
- A. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGDocument143 pagesA. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGRyan Togonon100% (1)
- 7SG18 - Solkor N Complete Technical Manual PDFDocument154 pages7SG18 - Solkor N Complete Technical Manual PDFmonikaNo ratings yet
- RESMETH Instructors ManualDocument32 pagesRESMETH Instructors ManualportucasbasNo ratings yet
- Hamsters and Their OffspringDocument3 pagesHamsters and Their OffspringClaire FarronNo ratings yet
- 5.5 CBM Waste Skip Open Top - POWER BearDocument1 page5.5 CBM Waste Skip Open Top - POWER Bearqtia71133No ratings yet
- The Paper Airplane GameDocument5 pagesThe Paper Airplane GamegoonygoogooNo ratings yet
- InternationalDocument11 pagesInternationalVijaya SethiNo ratings yet
- Element Main - JsDocument51 pagesElement Main - JsjaaritNo ratings yet
- On Annemarie Mols The Body MultipleDocument4 pagesOn Annemarie Mols The Body MultipleMAGALY GARCIA RINCONNo ratings yet
- Portfolio in My Immersion Work 2.0Document41 pagesPortfolio in My Immersion Work 2.0floreson 16No ratings yet
- Ch. 9 Sampling Distributions and Confidence Intervals For ProportionsDocument22 pagesCh. 9 Sampling Distributions and Confidence Intervals For ProportionsThanh PhamNo ratings yet
- Yamaha Nmax Smart Key SystemDocument1 pageYamaha Nmax Smart Key Systemmotley crewzNo ratings yet
- Suppliers Assessment ChecklistDocument3 pagesSuppliers Assessment ChecklistRonnel LeanoNo ratings yet
- E-Learning Tender RFPDocument41 pagesE-Learning Tender RFPnaidu naga nareshNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/31Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/31Erdoğan ŞahinNo ratings yet
- Hindustan Lever: Case 15-4Document11 pagesHindustan Lever: Case 15-4anilnair88100% (1)
- Q2 English 2 Week 7 Module 7 Sequencing of EventsDocument27 pagesQ2 English 2 Week 7 Module 7 Sequencing of EventsGrapes Lyn EstrellaNo ratings yet
- 5th Ed Ch02 QCDocument6 pages5th Ed Ch02 QCmohanNo ratings yet