Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Torques Motor 3066Document29 pagesTorques Motor 3066David Ohara93% (29)
- LM2500 and PGT25 Gas Turbine Families: Updated Shutdown and Restart ProceduresDocument15 pagesLM2500 and PGT25 Gas Turbine Families: Updated Shutdown and Restart ProceduresFlávio Nascimento100% (1)
- 400HP LV Toshiba MotorDocument20 pages400HP LV Toshiba MotorEdil MartinezNo ratings yet
- Acer Aspire 4410-4410t 1 WISTRON jm41 - 08266-1Document40 pagesAcer Aspire 4410-4410t 1 WISTRON jm41 - 08266-1Maintenance broNo ratings yet
- JM41/JM51 UMA Block Diagram: Intel CPUDocument41 pagesJM41/JM51 UMA Block Diagram: Intel CPUAlexander BronnikovNo ratings yet
- Acer AS4810 - 5810 1 WISTRON jm41 - jm51 - Dis - 08274-1Document48 pagesAcer AS4810 - 5810 1 WISTRON jm41 - jm51 - Dis - 08274-1Luis Alberto ArizaNo ratings yet
- Packard Bell ETNA GM-WistronDocument50 pagesPackard Bell ETNA GM-WistronEdson HenriqueNo ratings yet
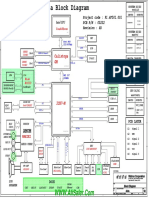
- Anote2.0 Block Diagram: UMA Solution DISCRETE SolutionDocument58 pagesAnote2.0 Block Diagram: UMA Solution DISCRETE SolutionIIIkwarkaNo ratings yet
- JV10-CS 48.4gs01.0sa 09918-1 0122 R-1Document50 pagesJV10-CS 48.4gs01.0sa 09918-1 0122 R-1ferguso sugengNo ratings yet
- Sony Vaio VPC-EG Series MBX-250 Wistron Z40HRDocument73 pagesSony Vaio VPC-EG Series MBX-250 Wistron Z40HRFernando IllescasNo ratings yet
- Vinafix - VN Acer Aspire 4741zg Emachines d730 - Wistron Hm42-Cp Je40-Cp - Rev SCDocument68 pagesVinafix - VN Acer Aspire 4741zg Emachines d730 - Wistron Hm42-Cp Je40-Cp - Rev SCเอกชัย เพชรจันทร์No ratings yet
- Sualaptop365.edu - VN - Acer 4741G 4743G HM42-CP 0122 09920-3 JE40-CP MBDocument68 pagesSualaptop365.edu - VN - Acer 4741G 4743G HM42-CP 0122 09920-3 JE40-CP MBEcho RodeoNo ratings yet
- Lenovo 3000 G230 DDR3Document41 pagesLenovo 3000 G230 DDR3Anh TranNo ratings yet
- Acer Jm31 CP UnlockedDocument62 pagesAcer Jm31 CP UnlockedIntan PayungNo ratings yet
- CADIZ-CP Block Diagram: Intel CPUDocument57 pagesCADIZ-CP Block Diagram: Intel CPUvnenovNo ratings yet
- Sony Mbx-229 - Wistron Cadiz-Cp - Rev - 1mDocument57 pagesSony Mbx-229 - Wistron Cadiz-Cp - Rev - 1mLeandro SilvaNo ratings yet
- Schematics V3000aDocument39 pagesSchematics V3000aBack UpsNo ratings yet
- Garda D 05217 1 Acer Ag1d R 1m 1220 pdf.8159Document53 pagesGarda D 05217 1 Acer Ag1d R 1m 1220 pdf.8159new b13No ratings yet
- Laptop Lenovo Foxcon-S09Document45 pagesLaptop Lenovo Foxcon-S09حسن علي نوفلNo ratings yet
- Varmeca 30Document68 pagesVarmeca 30Ku BonNo ratings yet
- BMS ManualDocument8 pagesBMS Manualdraw ioNo ratings yet
- JM41 Block Diagram: Intel CPUDocument40 pagesJM41 Block Diagram: Intel CPUMayank Mani SinghNo ratings yet
- Tlm-1903 Service ManualDocument40 pagesTlm-1903 Service ManualdaldoggyNo ratings yet
- HP Pavilion dv2000 Intel 945 Akita 05232 Rev SD SchematicsDocument39 pagesHP Pavilion dv2000 Intel 945 Akita 05232 Rev SD SchematicsGyan PrakashNo ratings yet
- Mobile CPU: ICS 9LPRS365Document51 pagesMobile CPU: ICS 9LPRS365Edson HenriqueNo ratings yet
- DSP-TMS320LF2407: Eeral Ontrols TDDocument17 pagesDSP-TMS320LF2407: Eeral Ontrols TDNetra RayNo ratings yet
- Fujitsu Siemens Esprimo Mobile V6535 Wistron D45 - D46 RevSA Schematic PDFDocument47 pagesFujitsu Siemens Esprimo Mobile V6535 Wistron D45 - D46 RevSA Schematic PDFhonafa- R.O.N.ONo ratings yet
- TL2843B Q1 etcTIDocument18 pagesTL2843B Q1 etcTIrahma jayaNo ratings yet
- Lenovo B460 Wistron LB46EDocument53 pagesLenovo B460 Wistron LB46Eحسن علي نوفلNo ratings yet
- Acer 4741 HM42 CP 0122 Je40-Cp 09920 4GW01Document68 pagesAcer 4741 HM42 CP 0122 Je40-Cp 09920 4GW01yanaNo ratings yet
- Acer 4741 HTTPSDocument68 pagesAcer 4741 HTTPSgoinstanNo ratings yet
- Acer Aspire 7535 - 7535ZG - 7735 - 7738 Wistron JM70-MV RevSB SchematicDocument55 pagesAcer Aspire 7535 - 7535ZG - 7735 - 7738 Wistron JM70-MV RevSB Schematicpremium.technNo ratings yet
- Acer Aspire5560 (Wistron Ag1 UMA-1-0309 PDFDocument45 pagesAcer Aspire5560 (Wistron Ag1 UMA-1-0309 PDFsousalrNo ratings yet
- Wistron Morar RSB SchematicsDocument41 pagesWistron Morar RSB SchematicsНиколай СтупниковNo ratings yet
- 250W High Power Factor Supply For TV: Application NoteDocument6 pages250W High Power Factor Supply For TV: Application Noterc_casas99No ratings yet
- Wistron Bali 08124-1Document52 pagesWistron Bali 08124-1Ermin PinangNo ratings yet
- Acer TravelMate C310 Canary2 Laptop SchematicsDocument55 pagesAcer TravelMate C310 Canary2 Laptop SchematicsDeadMikeNo ratings yet
- AN37010A PanasonicDocument17 pagesAN37010A PanasonicJorge CastrillonNo ratings yet
- 8548 Board Circuit: 0.8-1.1V - CPUDocument20 pages8548 Board Circuit: 0.8-1.1V - CPUPrint ImageNo ratings yet
- 5800 A9k54b 0P00Document17 pages5800 A9k54b 0P00Alejandro Mayol100% (1)
- Lenovo B460E LB46E MB 10307-1Document53 pagesLenovo B460E LB46E MB 10307-1NICSTRONNo ratings yet
- ACER Aspire 7736 GM45 JV71-MV - DDR3Document62 pagesACER Aspire 7736 GM45 JV71-MV - DDR3miecho1985No ratings yet
- TMC4671Document4 pagesTMC4671markoskace02No ratings yet
- 5738Z JV50-MV Schematic DiagramDocument60 pages5738Z JV50-MV Schematic DiagramSelmn Şnlı100% (1)
- Acer Aspire 5738 Aspire 5338 JV50 - MV - SBDocument60 pagesAcer Aspire 5738 Aspire 5338 JV50 - MV - SBTsukamoto TsukushiNo ratings yet
- MBX-250 Z40HR MB S0203-2Document73 pagesMBX-250 Z40HR MB S0203-2Dellys DiazNo ratings yet
- HP Pavilion Dv2000 (965gm) Wistron Pamirs Uma 06228 Rev SBDocument41 pagesHP Pavilion Dv2000 (965gm) Wistron Pamirs Uma 06228 Rev SBGioto LourencoNo ratings yet
- AME, Inc.: N General Description N FeaturesDocument17 pagesAME, Inc.: N General Description N FeaturesJonathan A. Duran TabiloNo ratings yet
- Block Diagram: 5.1 Main BoardDocument8 pagesBlock Diagram: 5.1 Main BoardRicardo EmilioNo ratings yet
- Acer Aspire 3935 (Wistron SM30) PDFDocument45 pagesAcer Aspire 3935 (Wistron SM30) PDFMustafa AkanNo ratings yet
- JV10-CS - Rev - 1 09918-2 R-1 0210 PDFDocument50 pagesJV10-CS - Rev - 1 09918-2 R-1 0210 PDFferguso sugengNo ratings yet
- D D D D D D: TMS27C010A 131 072 BY 8-BIT UV ERASABLE TMS27PC010A 131 072 BY 8-BIT Programmable Read-Only MemoriesDocument14 pagesD D D D D D: TMS27C010A 131 072 BY 8-BIT UV ERASABLE TMS27PC010A 131 072 BY 8-BIT Programmable Read-Only MemoriesElliot ValenzuelaNo ratings yet
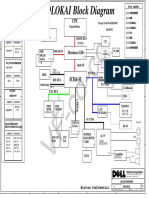
- MOLOKAI Block Diagram: VF-co-ccDocument39 pagesMOLOKAI Block Diagram: VF-co-ccWILLPC369No ratings yet
- Acer Aspire 5735 Intel Wistron Cathedral Peak II PDFDocument44 pagesAcer Aspire 5735 Intel Wistron Cathedral Peak II PDFthorito23No ratings yet
- HP DV1000 (Wistron Leopard3) PDFDocument41 pagesHP DV1000 (Wistron Leopard3) PDFASDFG21No ratings yet
- Xu Ly Sanyo Le42b30Document6 pagesXu Ly Sanyo Le42b30Lamdtiph LamNo ratings yet
- Anote2 SC 0112 1330 Final PDFDocument58 pagesAnote2 SC 0112 1330 Final PDFivan bogdanNo ratings yet
- M2303ADNDocument15 pagesM2303ADNffyddNo ratings yet
- PWM DC Motor Control Using Timer A of The MSP430Document3 pagesPWM DC Motor Control Using Timer A of The MSP430Deepu ChinnaNo ratings yet
- Acer - Travelmate 2423 (Ag1-910) PDFDocument40 pagesAcer - Travelmate 2423 (Ag1-910) PDFLos QuilmesNo ratings yet
- Electronic Automotive Transmission Troubleshooter Nissan-Infinity VehiclesFrom EverandElectronic Automotive Transmission Troubleshooter Nissan-Infinity VehiclesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- The Design of Intelligent Washing Machine Controller Based On FPGADocument4 pagesThe Design of Intelligent Washing Machine Controller Based On FPGAKINGS entertainment KHANNo ratings yet
- Image Processing Based Automatic-7488Document13 pagesImage Processing Based Automatic-7488KINGS entertainment KHANNo ratings yet
- Hardware Design and PinoutsDocument10 pagesHardware Design and PinoutsKINGS entertainment KHANNo ratings yet
- NetworkPlan 1Document1 pageNetworkPlan 1KINGS entertainment KHANNo ratings yet
- Lab 2Document16 pagesLab 2KINGS entertainment KHANNo ratings yet
- 04 Dynamic Programming 2 EditdistanceDocument99 pages04 Dynamic Programming 2 EditdistanceKINGS entertainment KHANNo ratings yet
- FCS-Course-division - Spring - 2023 PDFDocument1 pageFCS-Course-division - Spring - 2023 PDFKINGS entertainment KHANNo ratings yet
- 03 Divide and Conquer 3 Master TheoremDocument76 pages03 Divide and Conquer 3 Master TheoremKINGS entertainment KHANNo ratings yet
- Lec 3Document13 pagesLec 3KINGS entertainment KHANNo ratings yet
- EE 374 Feedback Control Systems For TE EL TCDocument71 pagesEE 374 Feedback Control Systems For TE EL TCKINGS entertainment KHANNo ratings yet
- F Monostable I) : Ulllted States Patent (19) (11) Patent Number: 6,091,994Document12 pagesF Monostable I) : Ulllted States Patent (19) (11) Patent Number: 6,091,994Mladen CvetkovicNo ratings yet
- Compare Products: ATV930C16N4C ATV930C20N4FDocument5 pagesCompare Products: ATV930C16N4C ATV930C20N4Frian0201No ratings yet
- KSB Vitachrom Ba en 2005.05Document24 pagesKSB Vitachrom Ba en 2005.05Dennis ArhinNo ratings yet
- Series CR-CRS-CRCDocument8 pagesSeries CR-CRS-CRCThu Hiền NguyễnNo ratings yet
- ElectricalDocument8 pagesElectricalArun UnbeatableNo ratings yet
- Smart Bin Implementation For Smart Cities: PresentationDocument13 pagesSmart Bin Implementation For Smart Cities: PresentationSagarika Vardhan100% (1)
- Lexium 32 Motion Control: Catalog JuneDocument54 pagesLexium 32 Motion Control: Catalog JunejesusortegavNo ratings yet
- Sail Rourkela 2019 Ans KeyDocument16 pagesSail Rourkela 2019 Ans KeyJidh KumarNo ratings yet
- Com - Com: Solid State Protective RelaysDocument23 pagesCom - Com: Solid State Protective Relaysshehroz baigNo ratings yet
- Data SheetDocument5 pagesData Sheet1BElvara Dinda FebrielaNo ratings yet
- Electric Motor Peripheral Water PumpDocument3 pagesElectric Motor Peripheral Water PumpzhelipumpNo ratings yet
- 1 1 GSF Rig 127 - SpecsDocument2 pages1 1 GSF Rig 127 - SpecsMohamed MostafaNo ratings yet
- Hyster 279YDocument30 pagesHyster 279Ymilton apraezNo ratings yet
- IPL 360-35 NewDocument39 pagesIPL 360-35 NewbertrandthouinrenaudNo ratings yet
- 192 141101 SLVD-N ManualDocument201 pages192 141101 SLVD-N Manualchonnapat iampathNo ratings yet
- 3rw52356ac14 Siemens Softstarter PDFDocument8 pages3rw52356ac14 Siemens Softstarter PDFJUAN DAVID BENAVIDES VALLEJOSNo ratings yet
- Datos TecnicosDocument4 pagesDatos TecnicosJuan CarlosNo ratings yet
- CNC PCB Drilling Machine Using Novel Natural Approach To Euclidean TSPDocument6 pagesCNC PCB Drilling Machine Using Novel Natural Approach To Euclidean TSPIrina AtudoreiNo ratings yet
- Sigma Control Compresor KaesarDocument20 pagesSigma Control Compresor KaesartaufikNo ratings yet
- Design and Fabrication of Student Solar CarDocument6 pagesDesign and Fabrication of Student Solar CarAnonymous izrFWiQNo ratings yet
- Englishmanual - Felm A (Hu) Sq.000.01 - en Rev1Document28 pagesEnglishmanual - Felm A (Hu) Sq.000.01 - en Rev1Amir AmaraNo ratings yet
- GV2ME08 Manual StarterDocument10 pagesGV2ME08 Manual StarterAriel DimacaliNo ratings yet
- Cinova-CI Flexo PressDocument20 pagesCinova-CI Flexo PressMahmoud Fathi100% (1)
- Steel W Orks Products (Thailand) : Elevator Controller SystemDocument4 pagesSteel W Orks Products (Thailand) : Elevator Controller Systemtran xobonNo ratings yet
- Microcontroller Based Automatic Missile Detection and Destroy SystemDocument31 pagesMicrocontroller Based Automatic Missile Detection and Destroy SystemMOHAMMAD ASLAMNo ratings yet
- Delcos 3000 Manual de Instrucciones Del ProcesadorDocument28 pagesDelcos 3000 Manual de Instrucciones Del ProcesadorAbel1974100% (2)