Download as docx, pdf, or txt
You might also like
- Lab File Basics of Electronics & Electrical Engg. (For PTU B.Tech. 1st Year)Document49 pagesLab File Basics of Electronics & Electrical Engg. (For PTU B.Tech. 1st Year)Cutie33% (3)
- (BS 1041-4-1992) - Temperature Measurement. Guide To The Selection and Use of Thermocouples PDFDocument32 pages(BS 1041-4-1992) - Temperature Measurement. Guide To The Selection and Use of Thermocouples PDFAnonymous Y833nLdD100% (1)
- Bee Lab Manual R19Document25 pagesBee Lab Manual R19Sudharshan ChennupalliNo ratings yet
- Em-Ii ExperimentDocument19 pagesEm-Ii Experimentprince rajNo ratings yet
- 19bei0067 VL2021220100832 Ast03Document12 pages19bei0067 VL2021220100832 Ast03freeretdocsNo ratings yet
- Lab ReportDocument17 pagesLab ReporttivendranNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Short CicuitDocument6 pagesShort CicuitWilsonNo ratings yet
- EE8311 Electrical Machines Lab - 1 Manual PDFDocument67 pagesEE8311 Electrical Machines Lab - 1 Manual PDFkrishnandrk100% (2)
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualDocument81 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonNo ratings yet
- EM-I LAB-finalDocument114 pagesEM-I LAB-finalHarimadhavareddy YenireddyNo ratings yet
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701160% (5)
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab Manual FINAL PDFDocument82 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab Manual FINAL PDFBHUVANA ARUMUGAMNo ratings yet
- Regulation of Alternators by Emf Method: Ex - NoDocument5 pagesRegulation of Alternators by Emf Method: Ex - NosellakumarNo ratings yet
- Swinburns'S Test On D.C Shunt MachineDocument15 pagesSwinburns'S Test On D.C Shunt MachineharimadhavareddyNo ratings yet
- EE3411 EM-II Lab Manual FinalDocument71 pagesEE3411 EM-II Lab Manual FinalManoj KumarNo ratings yet
- E M 1 Lab ManualDocument63 pagesE M 1 Lab ManualdsparanthamanNo ratings yet
- Sr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorDocument40 pagesSr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorSagar G ReddyNo ratings yet
- Open Circuit Characteristics of Self Excited DC Shunt GeneratorDocument5 pagesOpen Circuit Characteristics of Self Excited DC Shunt Generatorramniwas123No ratings yet
- Be8261 Beee LabDocument44 pagesBe8261 Beee LabBharath PonNo ratings yet
- DC Machines and Transformers Lab Manual ModifiedDocument50 pagesDC Machines and Transformers Lab Manual ModifiedSuseel MenonNo ratings yet
- Ee2259 LMDocument90 pagesEe2259 LMPradeep KNo ratings yet
- Electrical Machine-II Laboratory Manual B.Tech, 3 Yr, 5 Semester, Electrical Engg. DeptDocument28 pagesElectrical Machine-II Laboratory Manual B.Tech, 3 Yr, 5 Semester, Electrical Engg. DeptMoumi PanditNo ratings yet
- Tanmay Agrawal: Pre-Lab QuestionsDocument9 pagesTanmay Agrawal: Pre-Lab QuestionsTanmay Agrawal (RA2011047010093)No ratings yet
- DC Machines Manual-1Document38 pagesDC Machines Manual-1sarikaNo ratings yet
- Exp 1 N 2Document16 pagesExp 1 N 2mallikarjunbpatilNo ratings yet
- Open Circuit Characteristics of Self Excited DC Shunt GeneratorDocument10 pagesOpen Circuit Characteristics of Self Excited DC Shunt Generatorramniwas123No ratings yet
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualDocument162 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonNo ratings yet
- Open Circuit and Short Circuit On Single Phase TransformerDocument9 pagesOpen Circuit and Short Circuit On Single Phase TransformerManju KommojuNo ratings yet
- Machines Lab ManualDocument124 pagesMachines Lab ManualpurushothNo ratings yet
- EM-II FinalDocument57 pagesEM-II FinalAtchyut Satya KumarNo ratings yet
- Electrical Machine LabDocument23 pagesElectrical Machine LabAmit kumar singhNo ratings yet
- 120EE1098 - Vennela Medaboina - Merged BEE Report-CompressedDocument83 pages120EE1098 - Vennela Medaboina - Merged BEE Report-CompressedSahasrabda Sai PradhanNo ratings yet
- Laboratory Manual: Hirasugar Institute of Technology, NidasoshiDocument67 pagesLaboratory Manual: Hirasugar Institute of Technology, NidasoshipriyaNo ratings yet
- Experiment 3 (No Load Blocked Rotor Test On Single Phase Im)Document5 pagesExperiment 3 (No Load Blocked Rotor Test On Single Phase Im)Adarsh SinghNo ratings yet
- Sumpner's TestDocument5 pagesSumpner's TestDina GaranNo ratings yet
- Power Electronicsand Simulation Lab 3 Year-Ii Semester: Name of The StudentDocument10 pagesPower Electronicsand Simulation Lab 3 Year-Ii Semester: Name of The StudentMahmoud EldabahNo ratings yet
- Power System by DavinderDocument28 pagesPower System by DavinderPurujit ChaturvediNo ratings yet
- WINSEM2023-24 BEEE215P LO CH2023240502410 Reference Material I Experiments Cycle 1Document27 pagesWINSEM2023-24 BEEE215P LO CH2023240502410 Reference Material I Experiments Cycle 1nadeshNo ratings yet
- 1no Load-And-Blocked-Rotor-Test-On-Single Phase-Induction MotorFF PDFDocument5 pages1no Load-And-Blocked-Rotor-Test-On-Single Phase-Induction MotorFF PDFkobamelo LetowaNo ratings yet
- EM-I LAB-finalDocument111 pagesEM-I LAB-finalHarimadhavareddy YenireddyNo ratings yet
- List of Experiments: Sno Name of The Experiment Date SignatureDocument41 pagesList of Experiments: Sno Name of The Experiment Date SignatureRajeshKanchanaNo ratings yet
- Lab Manual: Ee 2305 Electrical Machines Lab IiDocument38 pagesLab Manual: Ee 2305 Electrical Machines Lab IiskrtamilNo ratings yet
- Rotating Electrical Machine Lab: B.E. 5 SemesterDocument33 pagesRotating Electrical Machine Lab: B.E. 5 SemesterSuma Rani GNo ratings yet
- Aim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDocument4 pagesAim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDevansh MankarNo ratings yet
- Analog and Digital CircuitsDocument52 pagesAnalog and Digital CircuitsAlfredNo ratings yet
- Electrical Machines-II Lab ManualDocument61 pagesElectrical Machines-II Lab ManualMARIA ELLAH LUBATNo ratings yet
- Beeel 1a2Document12 pagesBeeel 1a2Dr. S MuthukumarNo ratings yet
- Lab Manual For e E& CSDocument83 pagesLab Manual For e E& CSsudheerreddy115100% (1)
- Yog Patil - Expt. No. 3Document8 pagesYog Patil - Expt. No. 3Yog PatilNo ratings yet
- Exp 09 PostlabDocument10 pagesExp 09 PostlabjatinNo ratings yet
- 1a.regulation of Alternator by Emf MethodDocument7 pages1a.regulation of Alternator by Emf MethodsakthipriyaNo ratings yet
- Alternator by Emf MethodDocument7 pagesAlternator by Emf MethodsakthipriyaNo ratings yet
- Experiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheoryDocument7 pagesExperiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheorySur ShriNo ratings yet
- Electrical and Electronics Engineering Laboratory ManualDocument36 pagesElectrical and Electronics Engineering Laboratory Manualjith16No ratings yet
- 1.O.C. & S.C. Tests On Single Phase TransformerDocument6 pages1.O.C. & S.C. Tests On Single Phase Transformerchandrakanth100% (3)
- 17eel37 Eml Lab ManualDocument64 pages17eel37 Eml Lab ManualpriyaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- ESM Course FileDocument23 pagesESM Course FilepadmavathiNo ratings yet
- BRIEF TALK ON Electrical Safety MeasuresDocument3 pagesBRIEF TALK ON Electrical Safety MeasurespadmavathiNo ratings yet
- M.Tech - SRIT R23 - Syllabus - I SEMDocument35 pagesM.Tech - SRIT R23 - Syllabus - I SEMpadmavathiNo ratings yet
- Effective Communication SkillsDocument16 pagesEffective Communication SkillspadmavathiNo ratings yet
- L010976 - EMJ-04 Servo MotorDocument3 pagesL010976 - EMJ-04 Servo MotorRintuMathunniNo ratings yet
- Installation and Operation Manual: Thermo Scientific Jewett Laboratory FreezersDocument16 pagesInstallation and Operation Manual: Thermo Scientific Jewett Laboratory FreezersFernanda ContursiNo ratings yet
- Product Specification: Cosmo K1010Document6 pagesProduct Specification: Cosmo K1010James HarrisonNo ratings yet
- Report Activities (Hawassa Textile SC) Week 1: Nov/09-11/2016 Weekdays ActivitiesDocument4 pagesReport Activities (Hawassa Textile SC) Week 1: Nov/09-11/2016 Weekdays ActivitiestesfuNo ratings yet
- Krone: Lsa-Plus Disconnection ModuleDocument2 pagesKrone: Lsa-Plus Disconnection ModuleRonald BosNo ratings yet
- KVAR RegulationDocument2 pagesKVAR Regulationwagner_guimarães_1No ratings yet
- Ubd Unitplan Elecmag Ky 2016Document4 pagesUbd Unitplan Elecmag Ky 2016api-281562636No ratings yet
- ARM Robot Trainer SpecificationDocument1 pageARM Robot Trainer SpecificationOmar Hs100% (1)
- Silanos Circuit DiagramDocument1 pageSilanos Circuit Diagrambram samyNo ratings yet
- Principle and Application of WEICHAI Electrical High Common Rail SystemDocument44 pagesPrinciple and Application of WEICHAI Electrical High Common Rail Systemheri setyonoNo ratings yet
- Ohm's Law Lab ReportDocument7 pagesOhm's Law Lab ReportIzzah hazziqa100% (1)
- Emergency Stop Relays, Safety Gate Monitors PNOZ - X9P - GBDocument4 pagesEmergency Stop Relays, Safety Gate Monitors PNOZ - X9P - GBmanuel99a2kNo ratings yet
- QM81050 Data SheetDocument20 pagesQM81050 Data SheetLes VarietesNo ratings yet
- EV Charging Infra India1Document23 pagesEV Charging Infra India1raunakgokhale100% (1)
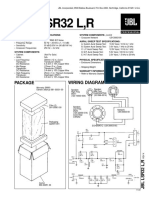
- LSR32LRDocument2 pagesLSR32LRRafael MendozaNo ratings yet
- Thermal Dynamics PakMaster 100 XL Plus Service ManualDocument74 pagesThermal Dynamics PakMaster 100 XL Plus Service ManualMetalAnon100% (3)
- Generatore MP10Document4 pagesGeneratore MP10Leonardo BruttiNo ratings yet
- Result For CorporateDocument131 pagesResult For CorporateNamala AshishNo ratings yet
- Allen Bradley QD Cord SelectionDocument162 pagesAllen Bradley QD Cord SelectionAnonymous AsIbqUNo ratings yet
- Product Information: Rotanode™ XRR-4631GDocument10 pagesProduct Information: Rotanode™ XRR-4631Gkhawar mukhtarNo ratings yet
- PG007-03 Toyota Service Bulletin - Maintenance For HV and Auxiliary BatteriesDocument8 pagesPG007-03 Toyota Service Bulletin - Maintenance For HV and Auxiliary BatteriesmmhoriiNo ratings yet
- Hickok 580 and 580A Fact Sheet: Circuit Design and Operation MethodDocument4 pagesHickok 580 and 580A Fact Sheet: Circuit Design and Operation MethodGusfmmNo ratings yet
- Ecd Final PJT ReportDocument7 pagesEcd Final PJT ReportZain UddinNo ratings yet
- Keystone - 1C - PVCDocument2 pagesKeystone - 1C - PVCYongJun LiuNo ratings yet
- Stage Monitor: ApplicationsDocument2 pagesStage Monitor: ApplicationsLumivox EventosNo ratings yet
- Temposonics: Magnetostrictive Linear Position SensorsDocument12 pagesTemposonics: Magnetostrictive Linear Position SensorsLam Duy TienNo ratings yet
- AC PWM Dimmer For ArduinoDocument15 pagesAC PWM Dimmer For ArduinoJavier PeresNo ratings yet
- Electrical Wire, Cable, and Cord: 1-99 Ft. $3.84 Per Ft. 100 or More $2.96 Per FTDocument1 pageElectrical Wire, Cable, and Cord: 1-99 Ft. $3.84 Per Ft. 100 or More $2.96 Per FTMiroslaw LabudaNo ratings yet
- As 3011.2-1992 Electrical Installations - Secondary Batteries Installed in Buildings Sealed CellsDocument5 pagesAs 3011.2-1992 Electrical Installations - Secondary Batteries Installed in Buildings Sealed CellsSAI Global - APACNo ratings yet