Download as pdf or txt
You might also like
- Iec TR 62278-3-2010Document70 pagesIec TR 62278-3-2010Joanne W100% (1)
- 0818 01 Los 50 - Writing - DDDocument274 pages0818 01 Los 50 - Writing - DDbmds kocakNo ratings yet
- Mod 4Document46 pagesMod 4unnathi naikNo ratings yet
- VC 1Document20 pagesVC 1nandkishor.exeNo ratings yet
- CG Unit-3 PDFDocument63 pagesCG Unit-3 PDFTechnical Kamal RajputNo ratings yet
- 04 3D Viewing (Engl)Document4 pages04 3D Viewing (Engl)veerendraNo ratings yet
- Computer GraphicsDocument13 pagesComputer Graphicstendots04No ratings yet
- CG Unit 5Document49 pagesCG Unit 5Lalitha PonnamNo ratings yet
- 10-3 - Camesa - Lens Equations - T2Document8 pages10-3 - Camesa - Lens Equations - T2No NameNo ratings yet
- Visible-Surface Determination: For (Each Pixel in The Image)Document23 pagesVisible-Surface Determination: For (Each Pixel in The Image)vissu.viitNo ratings yet
- Coordinate SystemsDocument40 pagesCoordinate Systemsgetchew100% (1)
- PhotogrammetryDocument54 pagesPhotogrammetrylomecaNo ratings yet
- Computer Graphics Imp1Document35 pagesComputer Graphics Imp1Aswin KVNo ratings yet
- Lec 7Document6 pagesLec 7stathiss11No ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- CVnotes2 BhuyanDocument4 pagesCVnotes2 BhuyanN.RAMAKUMARNo ratings yet
- L8 Fundamental of Imgae FormationDocument27 pagesL8 Fundamental of Imgae FormationApple ForScaleNo ratings yet
- 3d Projection and Mapping Seminar ReportDocument26 pages3d Projection and Mapping Seminar ReportHimani BhatiNo ratings yet
- Unit 4 Visible Surface Detection and Surface-RenderingDocument16 pagesUnit 4 Visible Surface Detection and Surface-RenderingimmNo ratings yet
- UNIT-5 - Hidden Lines and SurfacesDocument33 pagesUNIT-5 - Hidden Lines and SurfacesMahiye Ghosh100% (1)
- Image Formation: DD2423 Image Analysis and Computer VisionDocument45 pagesImage Formation: DD2423 Image Analysis and Computer VisionTrọng QuảngNo ratings yet
- Image RegistrationDocument33 pagesImage RegistrationsujithaNo ratings yet
- ProjectionsDocument9 pagesProjectionsstrrrweNo ratings yet
- Xray PFs-23Jan20Document64 pagesXray PFs-23Jan20venkatesh198910No ratings yet
- Unit-6 Three Dimensional TransformationsDocument10 pagesUnit-6 Three Dimensional Transformationsmeghal prajapatiNo ratings yet
- Unit 4 - CG - CSIT IVDocument16 pagesUnit 4 - CG - CSIT IVyogesh deoNo ratings yet
- 1521702258divyani Digi Photogrammetry (2Document20 pages1521702258divyani Digi Photogrammetry (2Bhanupratap Singh SodhaNo ratings yet
- Interpretative Photogrammetry 1Document53 pagesInterpretative Photogrammetry 1mihiretdesalegn95No ratings yet
- Image Registration: Gonzalez R. C., Woods R. E., Eddins S. L., Digital ImageDocument44 pagesImage Registration: Gonzalez R. C., Woods R. E., Eddins S. L., Digital Imagezain javaidNo ratings yet
- 3D Projection: 1 Orthographic Projection 2 Weak Perspective ProjectionDocument4 pages3D Projection: 1 Orthographic Projection 2 Weak Perspective ProjectiongragrgaraegNo ratings yet
- ISS Mathematical CalculationsDocument4 pagesISS Mathematical CalculationsTays ZambranoNo ratings yet
- Unit-4 Visible-Surface-Detection - sp-1Document12 pagesUnit-4 Visible-Surface-Detection - sp-1Rejina KhanalNo ratings yet
- Basic 3D Geometry For One and Two CamerasDocument5 pagesBasic 3D Geometry For One and Two CamerasRishabh Singh TomarNo ratings yet
- Hidden Surface Removal - Computer GraphicsDocument10 pagesHidden Surface Removal - Computer GraphicsSyedkareem_hkgNo ratings yet
- Lecture 2: Projection and Transformation: 3-Dimensional Objects Bounded by Planar Surfaces (Facets)Document4 pagesLecture 2: Projection and Transformation: 3-Dimensional Objects Bounded by Planar Surfaces (Facets)seventhhemanthNo ratings yet
- L7.Image GeometryDocument47 pagesL7.Image GeometryApple ForScaleNo ratings yet
- Stereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Document29 pagesStereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Rekha JayaprakashNo ratings yet
- Miscellaneous Transformations and ProjectionsDocument23 pagesMiscellaneous Transformations and ProjectionsAtilioGrondonaNo ratings yet
- Gis WorkbookDocument80 pagesGis WorkbookAbhijit ZendeNo ratings yet
- 14 MoreMosaicsDocument37 pages14 MoreMosaicsxolraxNo ratings yet
- 1319imguf UNIT 3Document60 pages1319imguf UNIT 3paratevedant1403No ratings yet
- Photogrammetry and Remote SensingDocument23 pagesPhotogrammetry and Remote SensingDipersan DhakalNo ratings yet
- UNIT - 2 Two Dimensional Geometric TransformationsDocument69 pagesUNIT - 2 Two Dimensional Geometric Transformationsmanikarnika ganpateNo ratings yet
- Geodetic TransformationsDocument6 pagesGeodetic TransformationsMahmoud RajabiNo ratings yet
- Chapter 3Document51 pagesChapter 3Teze TadeNo ratings yet
- Camera Geometry Alignment FinalDocument118 pagesCamera Geometry Alignment FinalLino García MoralesNo ratings yet
- CG Exp5 C28Document24 pagesCG Exp5 C28Prathmesh GaikwadNo ratings yet
- CSC4212 Lecture 3 - 3D Viewing - Projection TransformationDocument31 pagesCSC4212 Lecture 3 - 3D Viewing - Projection TransformationAhmad AbbaNo ratings yet
- EXPT 9 Thin LensesDocument7 pagesEXPT 9 Thin Lenses예지No ratings yet
- Lecture 5Document30 pagesLecture 5sab640887No ratings yet
- Why Camera Modeling?: Image ProcessingDocument10 pagesWhy Camera Modeling?: Image ProcessingRaju BhaiNo ratings yet
- Stereographic Projection: Complex AnalysisDocument4 pagesStereographic Projection: Complex AnalysisEhsan UmerNo ratings yet
- Relief Displacement, Paralaks Dan StereoDocument16 pagesRelief Displacement, Paralaks Dan StereoMarito ColoNo ratings yet
- CG Uni 4 Part 2 NotesDocument18 pagesCG Uni 4 Part 2 Notesg.jananiNo ratings yet
- Edddas 11223344Document11 pagesEdddas 11223344Azmi AbdulbaqiNo ratings yet
- TransformationDocument86 pagesTransformationedelineNo ratings yet
- Ifsr Feature CorrespondenceDocument25 pagesIfsr Feature Correspondencematlab5903No ratings yet
- 2 CGDocument8 pages2 CGSurendra Singh ChauhanNo ratings yet
- Unit-5 CGDocument9 pagesUnit-5 CGachintyashri2205No ratings yet
- 3d GraphicsDocument39 pages3d GraphicsShashwat MauryaNo ratings yet
- Unit 3 TransformationDocument39 pagesUnit 3 TransformationShambhavi MishraNo ratings yet
- Isometric Projection: Exploring Spatial Perception in Computer VisionFrom EverandIsometric Projection: Exploring Spatial Perception in Computer VisionNo ratings yet
- Gene-Definition, Concept of Gene-Classical and Modern ConceptsDocument4 pagesGene-Definition, Concept of Gene-Classical and Modern ConceptsAarthi shreeNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
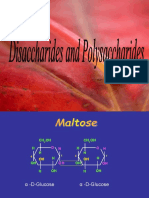
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- M. AARTHI SHREE 2020012001: Answer KeyDocument3 pagesM. AARTHI SHREE 2020012001: Answer KeyAarthi shreeNo ratings yet
- Properties of Mono SacchardiesDocument16 pagesProperties of Mono SacchardiesAarthi shreeNo ratings yet
- Overview of Central Dogma of LifeDocument4 pagesOverview of Central Dogma of LifeAarthi shreeNo ratings yet
- A Primer On Process Mining Practical Skills With Python and GraphvizDocument101 pagesA Primer On Process Mining Practical Skills With Python and GraphvizPeter JacksonNo ratings yet
- PropostaModeloUnificado 4Document6 pagesPropostaModeloUnificado 4JoaquinNo ratings yet
- Professional Practices: Assignment # 03Document4 pagesProfessional Practices: Assignment # 03ammarNo ratings yet
- DS Module4Document27 pagesDS Module4Sreekesh GiriNo ratings yet
- Plagiarism in ProfessionalismDocument8 pagesPlagiarism in ProfessionalismRyan EnriquezNo ratings yet
- Vingtor-Stentofon Phontech Maritime-Energy CatalogDocument93 pagesVingtor-Stentofon Phontech Maritime-Energy CatalogCarlos BarataNo ratings yet
- Computer Applications Technology: Teacher's GuideDocument220 pagesComputer Applications Technology: Teacher's GuideMelanieNo ratings yet
- Forticlient Ems - Release NotesDocument10 pagesForticlient Ems - Release NotesDody SubaktiyoNo ratings yet
- Fresenius Kabi Optima PT Vs ST Technical Manual PDFDocument104 pagesFresenius Kabi Optima PT Vs ST Technical Manual PDFPankaj KumarNo ratings yet
- 93 Circular 2022Document3 pages93 Circular 2022Yashvardhansingh bhatiNo ratings yet
- CST3180 - Week 4 - Requirements Specification and User ExperienceDocument26 pagesCST3180 - Week 4 - Requirements Specification and User ExperienceSaleemNo ratings yet
- Python Basics UMDocument1 pagePython Basics UMParag SharmaNo ratings yet
- Daftar Buyer Amerika SelatanDocument30 pagesDaftar Buyer Amerika Selatancitra sanjaya100% (1)
- Kunal Verma: Professional SummaryDocument2 pagesKunal Verma: Professional SummaryJagjiv VermaNo ratings yet
- Mercy KibetDocument56 pagesMercy KibetWeldon KNo ratings yet
- PROJET PS4.5 Operation ManualDocument418 pagesPROJET PS4.5 Operation ManualDidiet YudhistiraNo ratings yet
- 02 EasyIO FC20 User Reference v1.6 PDFDocument15 pages02 EasyIO FC20 User Reference v1.6 PDFnguyendinhphuc22008No ratings yet
- #Include Extern Int Int Do Do While While Return IntDocument15 pages#Include Extern Int Int Do Do While While Return IntPrati PandaNo ratings yet
- ISTQB FL Definitions and ExamplesDocument28 pagesISTQB FL Definitions and ExamplesSimeon TodorovNo ratings yet
- الرقمنة داخل مؤسسات المعلومات أم خارجهاDocument24 pagesالرقمنة داخل مؤسسات المعلومات أم خارجهاdakhianoureddine086No ratings yet
- 12.1 Inch Open Frame Touch Monitor Specification-G...Document21 pages12.1 Inch Open Frame Touch Monitor Specification-G...Nguyen Vu Hoang ThachNo ratings yet
- Manual For Active BowTieDocument40 pagesManual For Active BowTieAli Abbasov80% (5)
- Apk Pulled UrlsDocument12 pagesApk Pulled UrlsSebastián Quevedo MaripangueNo ratings yet
- Internet of Things (Iot) For Arduino-Realistic and Practical BookDocument14 pagesInternet of Things (Iot) For Arduino-Realistic and Practical BookIkhwanNo ratings yet
- Learning Word Representations For Tunisian SentimeDocument13 pagesLearning Word Representations For Tunisian SentimeSamawel JaballiNo ratings yet
- Design For Additive Manufacturing - A ReviewDocument7 pagesDesign For Additive Manufacturing - A ReviewTiago Camargo AlvesNo ratings yet
- Aktu Abc IdDocument29 pagesAktu Abc Idsharmagagan2104No ratings yet
- ExcelR Selenium Course Agenda With Value Added CoursesDocument24 pagesExcelR Selenium Course Agenda With Value Added Coursesrajeshgr9063No ratings yet