Download as pdf or txt
You might also like
- Computer Architecture Question PaperDocument14 pagesComputer Architecture Question Paperheaughfrds100% (1)
- Quiz 9Document10 pagesQuiz 9Babette Frey100% (1)
- Computer ArchitecherDocument6 pagesComputer ArchitecherMahmudul HasanNo ratings yet
- Chapter One - Introduction To Assembly Programming NoteDocument33 pagesChapter One - Introduction To Assembly Programming NoteMunir AliNo ratings yet
- Chapter One - IntroductionDocument33 pagesChapter One - IntroductionDesyilalNo ratings yet
- COA Mod 1Document41 pagesCOA Mod 1diwewe9515No ratings yet
- Computer Org - L3Document29 pagesComputer Org - L3محمد العموديNo ratings yet
- Lecture 1-1Document28 pagesLecture 1-1patriciaacquah30oNo ratings yet
- Ca and Co DifferencesDocument3 pagesCa and Co DifferencesABC SNo ratings yet
- Chap 1Document21 pagesChap 1yusha habibNo ratings yet
- Introduction To Computer OrganizationDocument66 pagesIntroduction To Computer OrganizationSajeev G PNo ratings yet
- 1.1the Computer SystemsDocument65 pages1.1the Computer Systems00.wonderer.00No ratings yet
- Computer Architecture Publication - 10 - 31293 - 49Document4 pagesComputer Architecture Publication - 10 - 31293 - 49processorlabsNo ratings yet
- Basic Computer Organization and Design-IDocument54 pagesBasic Computer Organization and Design-IchodarNo ratings yet
- 702-Umm-E-Rubab-Assignment-Mid Assignment-F1Document19 pages702-Umm-E-Rubab-Assignment-Mid Assignment-F1Akru JuttNo ratings yet
- ToDocument14 pagesToyetsedawNo ratings yet
- DLCOA Important Topics/ Questions: Advantages of Binary CodeDocument94 pagesDLCOA Important Topics/ Questions: Advantages of Binary CodeBrazil FFNo ratings yet
- CS6303 Computer Architecture Regulation 2013 BE-Computer Science and Engineering III Semester 2 Marks Unit-I Overview & InstructionsDocument18 pagesCS6303 Computer Architecture Regulation 2013 BE-Computer Science and Engineering III Semester 2 Marks Unit-I Overview & InstructionssathishNo ratings yet
- Unit 1 The Basic Computer: Structure Page NosDocument26 pagesUnit 1 The Basic Computer: Structure Page NosAnchorNo ratings yet
- Chapter One COADocument16 pagesChapter One COANati Man DejeneNo ratings yet
- Evolution of Computer ScienceDocument29 pagesEvolution of Computer ScienceBidrohi TollatNo ratings yet
- COMPUTER ARCHITECTURE ch-1Document38 pagesCOMPUTER ARCHITECTURE ch-1Tolera TamiruNo ratings yet
- Assignment # 01Document10 pagesAssignment # 01Roohul BayanNo ratings yet
- MCS-012 Block 1Document103 pagesMCS-012 Block 1Abhishek VeerkarNo ratings yet
- CAE101: Computer Organization and ArchitectureDocument31 pagesCAE101: Computer Organization and ArchitectureGuru BalanNo ratings yet
- Unit 1 The Basic Computer: Structure Page NosDocument103 pagesUnit 1 The Basic Computer: Structure Page NosGurmeet SinghNo ratings yet
- mcs-012 Study MaterialsDocument397 pagesmcs-012 Study Materialshamarip111No ratings yet
- St. Mary's University: Department of Computer ScienceDocument39 pagesSt. Mary's University: Department of Computer ScienceDofdofe KokoNo ratings yet
- Unit-1 CoaDocument43 pagesUnit-1 Coauma.chaudhary2022No ratings yet
- Digital Assignment-1 Name: Ayachitula Sankar Sudheer Reg No: 18BCE0556Document6 pagesDigital Assignment-1 Name: Ayachitula Sankar Sudheer Reg No: 18BCE0556Sankar AyachitulaNo ratings yet
- Cte 121Document24 pagesCte 121estheroluwafemi86No ratings yet
- Tutorial 1 Ans 1Document6 pagesTutorial 1 Ans 1SLIM SHADYNo ratings yet
- Operating System ToolsDocument4 pagesOperating System ToolsShivansh tomarNo ratings yet
- Jerome S. Del Castillo: BS ECE: 17-21514 Week 8:: Figure 1. Fetch-Execute CycleDocument4 pagesJerome S. Del Castillo: BS ECE: 17-21514 Week 8:: Figure 1. Fetch-Execute CycleJeromeDelCastilloNo ratings yet
- Computer Organization: Bus StructuresDocument4 pagesComputer Organization: Bus Structuressalman khanNo ratings yet
- Question Bank For Computer ArchitectureDocument23 pagesQuestion Bank For Computer ArchitecturesuryaNo ratings yet
- Chapter 1comDocument38 pagesChapter 1comaregawi weleabezgiNo ratings yet
- COMPORGA - Module 2Document13 pagesCOMPORGA - Module 2Happy FeetNo ratings yet
- Coa End Sem QBDocument39 pagesCoa End Sem QBDisha PatelNo ratings yet
- CA Classes-1-5Document5 pagesCA Classes-1-5SrinivasaRaoNo ratings yet
- Platform Technologies Module 2Document57 pagesPlatform Technologies Module 2Christian KingawNo ratings yet
- CSE 259 Lecture1 2Document9 pagesCSE 259 Lecture1 2robin haqueNo ratings yet
- Computer ArchitectureDocument17 pagesComputer Architectureyinnie5555No ratings yet
- Mca2010 SLM Unit 01Document15 pagesMca2010 SLM Unit 01amritrathourNo ratings yet
- Tutorial 1: Computer Organization and ArchitectureDocument4 pagesTutorial 1: Computer Organization and Architecturesajan gcNo ratings yet
- High Performance Computer Architecture (CS60003)Document17 pagesHigh Performance Computer Architecture (CS60003)Sunil MishraNo ratings yet
- Chapter1 - Von Neumann CADocument4 pagesChapter1 - Von Neumann CAsehgalharry284No ratings yet
- Unit IDocument7 pagesUnit IHarinath Ramamoorthy100% (1)
- Embedded Systems: Unit - IvDocument24 pagesEmbedded Systems: Unit - IvAshish AttriNo ratings yet
- Department of Computer Science and EngineeringDocument32 pagesDepartment of Computer Science and Engineeringjexehif3730% (1)
- BCA Paper-VII Block-1 Unit-1Document28 pagesBCA Paper-VII Block-1 Unit-1Soumyajit PaulNo ratings yet
- Introduction To Computer System and Its Submodules 2. Number System and Representation of Information. 3. Brief History of Comp. EvolutionDocument82 pagesIntroduction To Computer System and Its Submodules 2. Number System and Representation of Information. 3. Brief History of Comp. Evolutionbharadwaj RSSNo ratings yet
- WWW Scribd Com Doc 229334363 CS6303 Computer Architecture Two MarksDocument17 pagesWWW Scribd Com Doc 229334363 CS6303 Computer Architecture Two MarksABHAYNo ratings yet
- Com Roan in & Ar It ReDocument35 pagesCom Roan in & Ar It ReWaseem Muhammad KhanNo ratings yet
- Assignment 1Document4 pagesAssignment 1Misa AmanNo ratings yet
- Figure 1. Block Diagram of A ComputerDocument4 pagesFigure 1. Block Diagram of A ComputerVladimir KostadinovNo ratings yet
- Chapter 3 - A Top-Level View of Computer Function and InterconnectionDocument8 pagesChapter 3 - A Top-Level View of Computer Function and InterconnectionSamuel Febrian HermawanNo ratings yet
- Operating Systems Are Said To Be Interrupt Drive1Document4 pagesOperating Systems Are Said To Be Interrupt Drive1MaxwellNo ratings yet
- Cse IV Computer Organization (10cs46) SolutionDocument46 pagesCse IV Computer Organization (10cs46) SolutionTasleem Arif100% (1)
- The Coinage of Sind From 250 AD Up To The Arab Conquest (R.C. Senior)Document8 pagesThe Coinage of Sind From 250 AD Up To The Arab Conquest (R.C. Senior)Dorneshia NiggersonNo ratings yet
- A Comparative Study of Marriage Ceremonies Among Kashmiri Pandits and Kashmiri Muslims (S.A. Dar)Document10 pagesA Comparative Study of Marriage Ceremonies Among Kashmiri Pandits and Kashmiri Muslims (S.A. Dar)Dorneshia NiggersonNo ratings yet
- Understanding FATA 2Document116 pagesUnderstanding FATA 2Dorneshia NiggersonNo ratings yet
- Soft Computing PDFDocument60 pagesSoft Computing PDFDorneshia NiggersonNo ratings yet
- Shell and Kernel Notes PDFDocument12 pagesShell and Kernel Notes PDFDorneshia NiggersonNo ratings yet
- Art of Condensation and Letter WritingDocument21 pagesArt of Condensation and Letter WritingDorneshia NiggersonNo ratings yet
- Digital MCQDocument2 pagesDigital MCQsenthilkumarNo ratings yet
- Worksheet of XDocument7 pagesWorksheet of XSella PlkNo ratings yet
- MSP 430 F 149Document80 pagesMSP 430 F 149Kamil SieradzkiNo ratings yet
- Bdp-Lx70a Update Instruction Pee Ver381Document5 pagesBdp-Lx70a Update Instruction Pee Ver381Malika NavaratnaNo ratings yet
- Cara Downgrade Galaxy S4 Ke KitKat - HandphoneDocument7 pagesCara Downgrade Galaxy S4 Ke KitKat - HandphoneArrum WibowoNo ratings yet
- SOCKET G2 (SOCKET rPGA988B) PROCESSORS - Sheet1Document3 pagesSOCKET G2 (SOCKET rPGA988B) PROCESSORS - Sheet1arthurNo ratings yet
- Backup & Physical Security (HW Security)Document44 pagesBackup & Physical Security (HW Security)yusraNo ratings yet
- ControlMaestro 2018 and Titanium Hardware SpecificationsDocument7 pagesControlMaestro 2018 and Titanium Hardware SpecificationsSadegh AkbariNo ratings yet
- Cisco Nexus Deployment Guide c07-574724Document18 pagesCisco Nexus Deployment Guide c07-574724Maimoona TanveerNo ratings yet
- Dell XPS M1330 Service ManualDocument54 pagesDell XPS M1330 Service Manualmaoh800% (1)
- Nvidia Magnum Io Gpudirect Storage Overview Guide: 1.1. Related DocumentsDocument22 pagesNvidia Magnum Io Gpudirect Storage Overview Guide: 1.1. Related DocumentsNan_KingyjNo ratings yet
- Ims656 Chapter 6-1 Isd Operational - Tech MGTDocument24 pagesIms656 Chapter 6-1 Isd Operational - Tech MGTMuhammad Amirull AdlanNo ratings yet
- Canon Pixma Mx870 SMDocument66 pagesCanon Pixma Mx870 SMlospiderNo ratings yet
- Computer Architecture-Cache MicroarchitectureDocument36 pagesComputer Architecture-Cache MicroarchitecturepalkybdNo ratings yet
- MTHP4 Installation Manual v1.9Document15 pagesMTHP4 Installation Manual v1.9Jesus LozanoNo ratings yet
- 2 Pic18f452Document29 pages2 Pic18f452Mohan NatrajanNo ratings yet
- WP240 ManualDocument11 pagesWP240 ManualJorge_Andril_5370No ratings yet
- Computer Organization, Architecture and Machine Level ProgrammingDocument17 pagesComputer Organization, Architecture and Machine Level ProgrammingJaysen GeronimoNo ratings yet
- Rel NotesDocument11 pagesRel NotesYean-San LongNo ratings yet
- GNX4 em Espanhol PDFDocument127 pagesGNX4 em Espanhol PDFcristovao100% (1)
- Ds Amilo A1667gDocument3 pagesDs Amilo A1667gPoly PraktikaNo ratings yet
- Coa Cat - 1 - Answers - b2-KEY PDFDocument5 pagesCoa Cat - 1 - Answers - b2-KEY PDFAhmed Shmels MuheNo ratings yet
- AXI To AHB-Lite Bridge Cycle ModelDocument22 pagesAXI To AHB-Lite Bridge Cycle ModelavshaeNo ratings yet
- ITM-1602A LCM: User's GuideDocument19 pagesITM-1602A LCM: User's GuidegaikieuucNo ratings yet
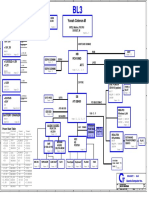
- Quanta Bl3 r3b SchematicsDocument31 pagesQuanta Bl3 r3b SchematicsmkonstNo ratings yet
- How To Restore Grub Bootloader in Linux - Make Tech EasierDocument17 pagesHow To Restore Grub Bootloader in Linux - Make Tech EasierEkaterina HoffmannNo ratings yet
- Language Lab SolutionDocument3 pagesLanguage Lab SolutionManKapNo ratings yet
- PLC ProgrammingDocument27 pagesPLC ProgrammingKavindu Ransara MudaligeNo ratings yet
- Mcan Users Manual v302Document94 pagesMcan Users Manual v302ULISESNo ratings yet