Download as pdf or txt
You might also like
- Grade 10 Lesson Plan Equation of A CircleDocument6 pagesGrade 10 Lesson Plan Equation of A CircleDaphne Torremocha89% (9)
- Pier Axis Definition in ETABSDocument2 pagesPier Axis Definition in ETABSkiruba100% (1)
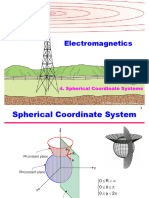
- Spherical Coordinate SystemsDocument16 pagesSpherical Coordinate Systemsjunwoo3614No ratings yet
- Cartesian Coordinates : Z y X PDocument184 pagesCartesian Coordinates : Z y X PMUHAMMAD IsrarNo ratings yet
- Chapter 1 - Vector AnalysisDocument27 pagesChapter 1 - Vector AnalysismayankardeshanaNo ratings yet
- Maths FormulaDocument2 pagesMaths FormulaSIP190004 STUDENTNo ratings yet
- Lecture 02a 26092023 032713pmDocument8 pagesLecture 02a 26092023 032713pmvacedok521No ratings yet
- CH 2Document29 pagesCH 2Yahya AlmolikiNo ratings yet
- Lecture Notes - Week 2Document28 pagesLecture Notes - Week 2Nawin RaNo ratings yet
- Review of Coordinate Systems:, Z), and Spherical (RDocument7 pagesReview of Coordinate Systems:, Z), and Spherical (REuric CalityNo ratings yet
- Electromagnetismo I: Z Z X Y A Y XDocument2 pagesElectromagnetismo I: Z Z X Y A Y Xjulitri21No ratings yet
- Cylindrical Coordinate System FDocument14 pagesCylindrical Coordinate System FRajeshNo ratings yet
- Cylindrical Polar Coordinate System: Welcome To The 3D World!Document24 pagesCylindrical Polar Coordinate System: Welcome To The 3D World!pranavNo ratings yet
- 2e.transformation of A Vector From Cartesian To Cylindrical CoordinateDocument1 page2e.transformation of A Vector From Cartesian To Cylindrical CoordinateRaaviNo ratings yet
- Slide 01 - 3D Coordinate SystemDocument49 pagesSlide 01 - 3D Coordinate SystemOmor FarukNo ratings yet
- 3d TransformationDocument6 pages3d TransformationRenu BangNo ratings yet
- ELEKTRODINAMIKADocument28 pagesELEKTRODINAMIKARo RohadiNo ratings yet
- 3D Geometric Transformation: Course Coordinator Dr. Badal SoniDocument32 pages3D Geometric Transformation: Course Coordinator Dr. Badal SoniSreshtha KashyapNo ratings yet
- EEE 201 Engineering Mathematics Assoc. Prof. Dr. Ertuğrul AKSOY Spherical CoordinatesDocument48 pagesEEE 201 Engineering Mathematics Assoc. Prof. Dr. Ertuğrul AKSOY Spherical Coordinates357911No ratings yet
- 3) Transformación de CoordenadasDocument4 pages3) Transformación de CoordenadaspercyNo ratings yet
- Study - Material - UNIT II at Cordinate SystemDocument41 pagesStudy - Material - UNIT II at Cordinate SystemAbhi RawatNo ratings yet
- Table - Coordinate SystemsDocument1 pageTable - Coordinate Systemsrevo32No ratings yet
- Coordinate Transformation Formula SheetDocument6 pagesCoordinate Transformation Formula SheetMostafa MohamedNo ratings yet
- Sim 3D TRANSFORMATIONS FinalDocument22 pagesSim 3D TRANSFORMATIONS FinalVaishakh SasikumarNo ratings yet
- Vector Algebra and Coordinate System-I: Dr. Yogesh Kumar ChoukikerDocument8 pagesVector Algebra and Coordinate System-I: Dr. Yogesh Kumar ChoukikerbunnyNo ratings yet
- Axis SymetricDocument44 pagesAxis SymetricAnand RajNo ratings yet
- Jacobi AnDocument34 pagesJacobi Anfitri puji rahayuNo ratings yet
- Electromagnetic Theory: ObjectiveDocument112 pagesElectromagnetic Theory: ObjectiveKaran Kumar SinghNo ratings yet
- Equations of ElasticityDocument1 pageEquations of Elasticityjerome balanoyosNo ratings yet
- Robotics: (2) Robot Coordinate SystemDocument20 pagesRobotics: (2) Robot Coordinate SystemAmeer SabryNo ratings yet
- 3c. The CurlDocument3 pages3c. The CurlSomya ShuklaNo ratings yet
- Lecture 06Document52 pagesLecture 06khanh hoa nguyenNo ratings yet
- Cylindrical and Spherical Coordinate Systems PDFDocument4 pagesCylindrical and Spherical Coordinate Systems PDFSteven ManfosteNo ratings yet
- Chapter 1 - Vector AnalysisDocument11 pagesChapter 1 - Vector AnalysisMuhammad HaikalNo ratings yet
- Chapter 1 - Vector AnalysisDocument11 pagesChapter 1 - Vector AnalysisBenjamin MusliuNo ratings yet
- Coordinate Transformation Formula Sheet PDFDocument6 pagesCoordinate Transformation Formula Sheet PDFdiptodevilNo ratings yet
- Coordinate Transformation Formula SheetDocument6 pagesCoordinate Transformation Formula SheetbldcerNo ratings yet
- CAP4730: Computational Structures in Computer Graphics: 3D TransformationsDocument49 pagesCAP4730: Computational Structures in Computer Graphics: 3D TransformationsAbhishek Pandey100% (1)
- Trigonometry Formula GuideDocument3 pagesTrigonometry Formula GuidePrabakaran Shiva0% (1)
- Robot Modeling-1 - 4Document13 pagesRobot Modeling-1 - 4LihuakNo ratings yet
- SESM3004 Fluid Mechanics: DR Anatoliy VorobevDocument16 pagesSESM3004 Fluid Mechanics: DR Anatoliy VorobevRN Builder IpohNo ratings yet
- Lecture Coordinate SystemsDocument5 pagesLecture Coordinate SystemsBill WhiteNo ratings yet
- TransformationDocument48 pagesTransformationAhmed AbdelsattarNo ratings yet
- 3 DtransformDocument10 pages3 DtransformokuwobiNo ratings yet
- Sample Solution Manual For Orbital Mechanics For Engineer 3rd CurtisDocument16 pagesSample Solution Manual For Orbital Mechanics For Engineer 3rd CurtisSumon SwiftNo ratings yet
- CG 3D TransformationDocument34 pagesCG 3D Transformationpiu2853No ratings yet
- CAP4730: Computational Structures in Computer Graphics: 3D TransformationsDocument48 pagesCAP4730: Computational Structures in Computer Graphics: 3D TransformationsmashuashuNo ratings yet
- S1Document37 pagesS1sbpathiNo ratings yet
- Function, Which Specifies A Particular Quantity Everywhere in The Region Two TypesDocument33 pagesFunction, Which Specifies A Particular Quantity Everywhere in The Region Two TypesRonan RojasNo ratings yet
- Assignment 1Document5 pagesAssignment 1Kireina Shafira HidayatNo ratings yet
- Magic SquaresDocument7 pagesMagic SquaresMassimiliano PatassiniNo ratings yet
- Engineering Electromagnetics Notes 10EC36Document196 pagesEngineering Electromagnetics Notes 10EC36Surji techNo ratings yet
- EEE 201 Engineering Mathematics Prof. Dr. Saffet AYASUN Inst:Dr. Bülent DağDocument23 pagesEEE 201 Engineering Mathematics Prof. Dr. Saffet AYASUN Inst:Dr. Bülent DağBarış DuranNo ratings yet
- Chapter 3 C DH Representation For Robotic ManipulatorsDocument88 pagesChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- 3D TransformationDocument6 pages3D Transformationgulati.paranjayNo ratings yet
- Forward Kinematics: "Finding The End Effector Given The Joint Angles"Document18 pagesForward Kinematics: "Finding The End Effector Given The Joint Angles"Saleem HaddadNo ratings yet
- Unit 1 VectorsDocument40 pagesUnit 1 VectorsVimala ElumalaiNo ratings yet
- Chapter-2 Emf by SadiqueDocument35 pagesChapter-2 Emf by SadiqueAnonymous 4bUl7jzGqNo ratings yet
- Lec4 Forward KinematicsDocument21 pagesLec4 Forward KinematicsbalkyderNo ratings yet
- Flip-Flop Characteristic and Excitation TablesDocument9 pagesFlip-Flop Characteristic and Excitation Tablesanon_641100917No ratings yet
- Lecture 4 Coordinate SystemsDocument33 pagesLecture 4 Coordinate SystemsFen D YapNo ratings yet
- Catenary: This File Is From The 3D-Xploremath Project. Please See HTTP://RSP - Math.Brandeis - Edu/3D-Xplormath/Index - HTMLDocument6 pagesCatenary: This File Is From The 3D-Xploremath Project. Please See HTTP://RSP - Math.Brandeis - Edu/3D-Xplormath/Index - HTMLHyunkyoun JinNo ratings yet
- BRH Survey Comps TextbookDocument287 pagesBRH Survey Comps Textbookचन्द्र प्रकाश100% (1)
- 4 Pure BendingDocument33 pages4 Pure BendingGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- IMG - 0085 College Admission Test 68Document1 pageIMG - 0085 College Admission Test 68rii amosNo ratings yet
- Coulomb LawDocument3 pagesCoulomb LawJohn KolmaNo ratings yet
- Solution: (X-H) (X-H) + (Y-K) (Y-K) - RDocument2 pagesSolution: (X-H) (X-H) + (Y-K) (Y-K) - RReighnar louisse FernandezNo ratings yet
- Rohini 34957349260Document4 pagesRohini 34957349260JHNo ratings yet
- Conics: ParabolasDocument13 pagesConics: ParabolasJJ MosesNo ratings yet
- Advances in Quantum MechanicsDocument755 pagesAdvances in Quantum MechanicsBrosoa LoquaNo ratings yet
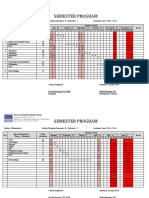
- Semester Program - NadyaDocument2 pagesSemester Program - NadyanadyapramitaNo ratings yet
- 2023 Practice Paper 2 Higher (Calculator) PDFDocument17 pages2023 Practice Paper 2 Higher (Calculator) PDFBivvyNo ratings yet
- Mirror S: Topic No. 6 / Second Quarter: PhysicsDocument19 pagesMirror S: Topic No. 6 / Second Quarter: PhysicsChristian DeanNo ratings yet
- Math Pre-Calculus - Semester Two Final: REVIEWDocument19 pagesMath Pre-Calculus - Semester Two Final: REVIEWKirby RoseNo ratings yet
- GSP LAB - Tessellations NewDocument9 pagesGSP LAB - Tessellations Newmiftahuddin67No ratings yet
- Gmat 1 PDFDocument6 pagesGmat 1 PDFSharanya IyerNo ratings yet
- Theorem 4.2Document14 pagesTheorem 4.2Edelmar BenosaNo ratings yet
- Filliman 1990Document18 pagesFilliman 1990epidendrum2No ratings yet
- 1st Year Half Book TestDocument43 pages1st Year Half Book Testumair talash100% (1)
- 3rd Periodical Quarter (Math9)Document6 pages3rd Periodical Quarter (Math9)Lourence CapaNo ratings yet
- M1 Mathematics PDFDocument284 pagesM1 Mathematics PDFAya DPradoNo ratings yet
- Review:: Instruction: Given The Values of The Right Triangle As Shown (On Each Paper), Find The ValueDocument4 pagesReview:: Instruction: Given The Values of The Right Triangle As Shown (On Each Paper), Find The ValueDrew RoaNo ratings yet
- Grade 7 Module 4 Constructing Pictorial DrawingDocument48 pagesGrade 7 Module 4 Constructing Pictorial DrawingMichael Tico33% (3)
- G10pretest PosttestDocument3 pagesG10pretest PosttestEdison100% (1)
- Area of A Region Between Two CurvesDocument10 pagesArea of A Region Between Two Curves213 - Kedar Dhane.No ratings yet
- 8th Maths EM Half Yearly Exam 2022 Original Question Paper Virudhunagar District English Medium PDF DownloadDocument2 pages8th Maths EM Half Yearly Exam 2022 Original Question Paper Virudhunagar District English Medium PDF Downloadsujinmeenu85No ratings yet
- 20 Days of 2d CAD Exercises Part IDocument24 pages20 Days of 2d CAD Exercises Part Ishiva dNo ratings yet
- 8 4 DilationsDocument8 pages8 4 DilationsYASSIEN ELBANNANo ratings yet
- ML Geometry 1-3 Segments and Their MeasuresDocument9 pagesML Geometry 1-3 Segments and Their Measuresmadhuraju778797No ratings yet