Download as pdf or txt
You might also like
- MEL3020: Kinematics and Dynamics of Machines: 3 WeekDocument27 pagesMEL3020: Kinematics and Dynamics of Machines: 3 WeekRavi VermaNo ratings yet
- Grashof's LawDocument3 pagesGrashof's LawSyed Faiz QuadriNo ratings yet
- Name - Rakesh Majumdar Department - ME Semester - 5 University Roll - 35000720041 Year - 3rd Topic - Grashof's LawDocument7 pagesName - Rakesh Majumdar Department - ME Semester - 5 University Roll - 35000720041 Year - 3rd Topic - Grashof's Law55MESuman sahaNo ratings yet
- Lecture 3 The Grashof ConditionDocument11 pagesLecture 3 The Grashof ConditionKATERENo ratings yet
- 21 - 1-Kinematic Inversion and Grashof - S Criteria - Student NoteDocument2 pages21 - 1-Kinematic Inversion and Grashof - S Criteria - Student NoteNishant DeyNo ratings yet
- Grashof RRRPDocument11 pagesGrashof RRRPPrathmesh Deshmukh0% (1)
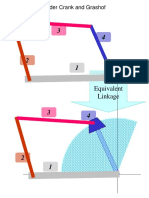
- Equivalent Linkage: Slider Crank and GrashofDocument11 pagesEquivalent Linkage: Slider Crank and GrashofAnshuman TagoreNo ratings yet
- Kinematics of Machines Prof A K Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module - 2 Lecture - 3Document29 pagesKinematics of Machines Prof A K Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module - 2 Lecture - 3Ravi Pratap SinghNo ratings yet
- Four LinkDocument19 pagesFour LinkBHAVESH JOSHINo ratings yet
- Lec 8Document12 pagesLec 8nihalsinghNo ratings yet
- Four Bar LinkageDocument9 pagesFour Bar LinkageAliceAlormenuNo ratings yet
- Tom 1Document8 pagesTom 1mhfaisal301No ratings yet
- Four Bar ExperimentDocument5 pagesFour Bar ExperimentMohsin IftikharNo ratings yet
- Grashof.1Document44 pagesGrashof.1ỮΜΔIŘ ҜĦΔŇNo ratings yet
- Gras HoffDocument1 pageGras HoffNatália OliveiraNo ratings yet
- Theory of Machine Student ManualDocument72 pagesTheory of Machine Student ManualWellington LimaNo ratings yet
- Elen665 PassiveRLC I Lect3Document49 pagesElen665 PassiveRLC I Lect3Habita KadourNo ratings yet
- Experiment #3 To Calculate and Draw Velocity, Acceleration Diagram of Four Bar Mechanism. TheoryDocument11 pagesExperiment #3 To Calculate and Draw Velocity, Acceleration Diagram of Four Bar Mechanism. TheoryMuhammad inshalNo ratings yet
- Tool RetrivelDocument42 pagesTool RetrivelganeshNo ratings yet
- Theory of Machine and MechanismsDocument21 pagesTheory of Machine and MechanismssrujanNo ratings yet
- Advanced Electric Drives Prof. S. P. Das Department of Electrical Engineering Indian Institution of Technology, Kanpur Lecture - 15Document19 pagesAdvanced Electric Drives Prof. S. P. Das Department of Electrical Engineering Indian Institution of Technology, Kanpur Lecture - 15Belal AshrafNo ratings yet
- Four Bar ChainDocument11 pagesFour Bar ChaindxfdxNo ratings yet
- Kinematic Fundamentals: Theory of Machines, MT 317 Engr. Akhtar KhurshidDocument26 pagesKinematic Fundamentals: Theory of Machines, MT 317 Engr. Akhtar KhurshidHammadMehmoodNo ratings yet
- Summary of Previous LectureDocument24 pagesSummary of Previous LecturebharatNo ratings yet
- Fin TH Machines 3Document9 pagesFin TH Machines 3getaby4uNo ratings yet
- Lecture - 2 - Inversion of MechanismDocument34 pagesLecture - 2 - Inversion of MechanismGorkha EngineeringNo ratings yet
- The Laplacian Operator From Cartesian To Cylindrical To Spherical Coordinates PDFDocument6 pagesThe Laplacian Operator From Cartesian To Cylindrical To Spherical Coordinates PDFManu ChakkingalNo ratings yet
- Introduction To Kinematics and MechanismsDocument25 pagesIntroduction To Kinematics and Mechanismsdhilip_sacetNo ratings yet
- Lec - 3 Finding Degrees of FreedomDocument19 pagesLec - 3 Finding Degrees of Freedompragathi mudavathNo ratings yet
- Chapter 1: Introduction and Basic Concepts: ECC309 - Theory of Machines IDocument48 pagesChapter 1: Introduction and Basic Concepts: ECC309 - Theory of Machines IABDULRAHMAN ADAMU MUSANo ratings yet
- Theory Lab Session No 3Document5 pagesTheory Lab Session No 3ABDULREHMAN RASHEEDNo ratings yet
- TM Lecture 3 and 4 PDFDocument9 pagesTM Lecture 3 and 4 PDFMohammed QuthahNo ratings yet
- A Note On The Structure of Roller Coaster PermutatDocument8 pagesA Note On The Structure of Roller Coaster PermutatMuhammad AdnanNo ratings yet
- ME316: Kinematics and Dynamics of Machines: Abhishek Gupta IIT BombayDocument8 pagesME316: Kinematics and Dynamics of Machines: Abhishek Gupta IIT BombaySumit BhNo ratings yet
- Optimistic Shortest Paths On Uncertain Terrains: 16th Canadian Conference On Computational Geometry, 2004Document4 pagesOptimistic Shortest Paths On Uncertain Terrains: 16th Canadian Conference On Computational Geometry, 2004Leo KutsNo ratings yet
- Unit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems IDocument6 pagesUnit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Sequential CircuitsDocument11 pagesSequential Circuitskunduru_reddy_3No ratings yet
- Fourbar Linkage 2024Document10 pagesFourbar Linkage 2024ndbira5No ratings yet
- 4 BarDocument5 pages4 BarJordan MarabelloNo ratings yet
- Grashof RRRRDocument14 pagesGrashof RRRRAnshuman TagoreNo ratings yet
- Kom Unit 1Document24 pagesKom Unit 1Muthuvel M100% (2)
- Introduction To Kinematics and MechanismsDocument25 pagesIntroduction To Kinematics and MechanismsAli Khan Niazi100% (1)
- Peter Jensen PolymersDocument25 pagesPeter Jensen PolymersUday KiranNo ratings yet
- Lec-4 Kinematic Behaviour of 4R 4bar MechanismsDocument17 pagesLec-4 Kinematic Behaviour of 4R 4bar Mechanismspragathi mudavathNo ratings yet
- Minimum Spanning Tree, Kruskal's and Prim's Algorithms, Applications in NetworkingDocument9 pagesMinimum Spanning Tree, Kruskal's and Prim's Algorithms, Applications in NetworkingThillai RajNo ratings yet
- Condition To Satisfy Grashof's LawDocument4 pagesCondition To Satisfy Grashof's LawAntony PeñalozaNo ratings yet
- Martin Kroger and Avinoam Ben-Shaul - On The Presence of Loops in Linear Self-Assembling Systems: Statistical Methods and Brownian DynamicsDocument9 pagesMartin Kroger and Avinoam Ben-Shaul - On The Presence of Loops in Linear Self-Assembling Systems: Statistical Methods and Brownian DynamicsLokosooNo ratings yet
- Grashof's LawDocument10 pagesGrashof's LawMihir MehanNo ratings yet
- Maryland Institute of Technology and Management, Jamshedpur Theory of Machine-Module: IIIDocument12 pagesMaryland Institute of Technology and Management, Jamshedpur Theory of Machine-Module: IIISourabh PradhanNo ratings yet
- Prob TOMDocument3 pagesProb TOMRıshabhBhawarNo ratings yet
- Problems-6 40-6 41Document7 pagesProblems-6 40-6 41Hasil SharmaNo ratings yet
- Tomo Takahashi - Non-Gaussianity in The Curvaton ScenarioDocument4 pagesTomo Takahashi - Non-Gaussianity in The Curvaton ScenarioJomav23No ratings yet
- Mechanisms Design ExamplesDocument13 pagesMechanisms Design ExamplesaliNo ratings yet
- M. P. Hertzberg, S. V. Vladimirov and N. F. Cramer - Rotational Modes of Oscillation of Rodlike Dust Grains in A PlasmaDocument9 pagesM. P. Hertzberg, S. V. Vladimirov and N. F. Cramer - Rotational Modes of Oscillation of Rodlike Dust Grains in A PlasmaDeez34PNo ratings yet
- Power System AnalysisDocument40 pagesPower System AnalysisA. HassanNo ratings yet
- Control Engineering StabilityDocument23 pagesControl Engineering StabilityAhmad Azree OthmanNo ratings yet
- Tutorial 8 - Stability and The S' Plane: © D.J.Dunn 1Document0 pagesTutorial 8 - Stability and The S' Plane: © D.J.Dunn 1Karthi KeyanNo ratings yet
- Topic: Inversions of Machanisms Preapared byDocument31 pagesTopic: Inversions of Machanisms Preapared byMehdi Hassan MiluNo ratings yet
- Introductory Laplace Transform with ApplicationsFrom EverandIntroductory Laplace Transform with ApplicationsRating: 5 out of 5 stars5/5 (1)
- 14_LectureOutlineDocument5 pages14_LectureOutline55MESuman sahaNo ratings yet
- Air Blower Test RigDocument3 pagesAir Blower Test Rig55MESuman sahaNo ratings yet
- VICTORDocument13 pagesVICTOR55MESuman sahaNo ratings yet
- HMT OrganizerDocument60 pagesHMT Organizer55MESuman sahaNo ratings yet
- Name - Rakesh Majumdar Department - ME Semester - 5 University Roll - 35000720041 Year - 3rd Topic - Grashof's LawDocument7 pagesName - Rakesh Majumdar Department - ME Semester - 5 University Roll - 35000720041 Year - 3rd Topic - Grashof's Law55MESuman sahaNo ratings yet