Download as pdf or txt
You might also like
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Gate SealsDocument172 pagesGate SealsIoannis SanoudosNo ratings yet
- Speed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKDocument8 pagesSpeed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKB.yaswanth KumarNo ratings yet
- Introduction To PMSM MachineDocument5 pagesIntroduction To PMSM MachineMd QutubuddinNo ratings yet
- Simulation of A Space Vector Pulse Width Modulated Field Oriented Control of A Permanent Magnet Synchronous MotorDocument18 pagesSimulation of A Space Vector Pulse Width Modulated Field Oriented Control of A Permanent Magnet Synchronous MotorVictor IkechukwuNo ratings yet
- BLDCDocument53 pagesBLDCstarboyNo ratings yet
- Sliding ModeDocument13 pagesSliding ModeSiva Ganesh MallaNo ratings yet
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDocument9 pagesModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Guzinski 2019Document6 pagesGuzinski 2019Hoang Bui HuyNo ratings yet
- Fault Detection and Fault-Tolerant Control of Interior Permanent-Magnet Motor Drive System For Electric VehicleDocument6 pagesFault Detection and Fault-Tolerant Control of Interior Permanent-Magnet Motor Drive System For Electric VehicleAnurag MishraNo ratings yet
- Extended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionSohibul HajahNo ratings yet
- BLDCDocument6 pagesBLDCsandeep_036No ratings yet
- Vector Control of Permanent Magnet Synchronous MotorDocument51 pagesVector Control of Permanent Magnet Synchronous MotorFAIZAN ALINo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Aman Powertrainev ElectricalDocument12 pagesAman Powertrainev Electricalsebecay203No ratings yet
- 2015 Fast-SpeedDrivesforPermanentMagnetDocument7 pages2015 Fast-SpeedDrivesforPermanentMagnetjemmyducNo ratings yet
- 1405 6815 PDFDocument7 pages1405 6815 PDFPrashanthSamaNo ratings yet
- Permanent Magnet Synchronous Motor ControlDocument3 pagesPermanent Magnet Synchronous Motor ControlMarcin KowalskiNo ratings yet
- Modeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveDocument9 pagesModeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveArthur CaiNo ratings yet
- Vector Controlled PMSM Drive Based On Fuzzy Speed ControllerDocument1 pageVector Controlled PMSM Drive Based On Fuzzy Speed ControllerKushagra KhamesraNo ratings yet
- Trapezoidal Control of BLDC Motors Using Hall Effect SensorsDocument33 pagesTrapezoidal Control of BLDC Motors Using Hall Effect Sensorstoggle123No ratings yet
- Speed Control of BLDC Motor Using Hybrid Controller: Strart UpDocument49 pagesSpeed Control of BLDC Motor Using Hybrid Controller: Strart UpAswani MucharlaNo ratings yet
- PMSM Speed ControlDocument1 pagePMSM Speed ControlKushagra KhamesraNo ratings yet
- Nicola - Marcel - ICATE 2016Document6 pagesNicola - Marcel - ICATE 2016Marcel NicolaNo ratings yet
- Research Article: A DSP-Controlled Permanent Magnet Synchronous Motor Control System For Hybrid VehiclesDocument9 pagesResearch Article: A DSP-Controlled Permanent Magnet Synchronous Motor Control System For Hybrid VehiclesMeryouma LarbNo ratings yet
- Simulation of PMSM Speed Control System-53291344Document6 pagesSimulation of PMSM Speed Control System-53291344Mmahm 1238No ratings yet
- Dual 3-Phase PMSM Development Kit With MPC5643L: Application NoteDocument30 pagesDual 3-Phase PMSM Development Kit With MPC5643L: Application NoteM. T.No ratings yet
- A High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMDocument9 pagesA High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMMaroju Santosh KiranNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- Thesis On Switched Reluctance MotorDocument4 pagesThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- AC Into DC MotorDocument9 pagesAC Into DC MotorIvan RisticNo ratings yet
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDocument8 pagesSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074No ratings yet
- Adaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet MotorDocument6 pagesAdaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet Motorfong jeffNo ratings yet
- Mathematical Modelling and Position Control of Brushless DC (BLDC) MotorDocument8 pagesMathematical Modelling and Position Control of Brushless DC (BLDC) MotorVictor FurmanNo ratings yet
- Speed Control of PMSM by Sliding Mode Control and PI Control1Document7 pagesSpeed Control of PMSM by Sliding Mode Control and PI Control1Lê Đức ThịnhNo ratings yet
- PMSM Motor For Electric VehiclesDocument8 pagesPMSM Motor For Electric Vehicles21EEB0B65NIKIHIL VINUKONDANo ratings yet
- HF 1 Zaim2014Document11 pagesHF 1 Zaim2014Duy TínhNo ratings yet
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- Comparison of The Speedy Estimate Methods of The Induction MotorsDocument12 pagesComparison of The Speedy Estimate Methods of The Induction MotorsTELKOMNIKANo ratings yet
- Modeling and Simulation of PermanentDocument83 pagesModeling and Simulation of PermanentSriram Anil Kumar GandhamNo ratings yet
- Sensors Used in HEVDocument4 pagesSensors Used in HEVvishiwizard100% (1)
- Electrical Power and Energy Systems: E.G. ShehataDocument9 pagesElectrical Power and Energy Systems: E.G. Shehataanil1216kumarNo ratings yet
- Simplified Sensorless Control For BLDC MDocument12 pagesSimplified Sensorless Control For BLDC MAlg DimasNo ratings yet
- Identification of The Machine Parameters IN Vector Controlled Induction Motor DriveDocument6 pagesIdentification of The Machine Parameters IN Vector Controlled Induction Motor DriveBelkacem BerrehailNo ratings yet
- Subject (UNREG08) - Sensorless Motor ControlDocument7 pagesSubject (UNREG08) - Sensorless Motor ControlsorrowarNo ratings yet
- Analysis and Simulation of The High-Speed Torque Performance of BrushleDocument10 pagesAnalysis and Simulation of The High-Speed Torque Performance of BrushlePhạm Văn TưởngNo ratings yet
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorDocument6 pagesPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- Current Control of Brushless DC Motor Based On A Common DC Signal For Space Operated VehicleDocument7 pagesCurrent Control of Brushless DC Motor Based On A Common DC Signal For Space Operated VehicleArif HassanNo ratings yet
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNo ratings yet
- Model Reference Adaptive Control For DC Motor Based On SimulinkDocument6 pagesModel Reference Adaptive Control For DC Motor Based On SimulinkJubei YanaikiNo ratings yet
- Brushless DC Motor Speed Control System of The Walking Aids MachineDocument4 pagesBrushless DC Motor Speed Control System of The Walking Aids MachineAl-ShukaNo ratings yet
- How To Drive DC Motors With Smart Power IcsDocument14 pagesHow To Drive DC Motors With Smart Power IcsGoran ŽivkovićNo ratings yet
- High Performance Position Control of Permanent Magnet Synchronous DrivesDocument11 pagesHigh Performance Position Control of Permanent Magnet Synchronous DrivesdjoodjooNo ratings yet
- Induction Motor Speed Control Using Fuzzy Logic Controller: AbstractDocument15 pagesInduction Motor Speed Control Using Fuzzy Logic Controller: AbstractAvinash VenkatNo ratings yet
- Sliding Mode EnergiesDocument17 pagesSliding Mode EnergiesDileep VarmaNo ratings yet
- Simplified Sensorless Control For BLDC Motor, Using DSP TechnologyDocument12 pagesSimplified Sensorless Control For BLDC Motor, Using DSP Technologymichael.schuhNo ratings yet
- EV Motors & DriversDocument10 pagesEV Motors & DriversSasindu GayanthaNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- PDF Download For JEE Advanced Previous Year Questions With Solutions On GravitationDocument7 pagesPDF Download For JEE Advanced Previous Year Questions With Solutions On GravitationGeetha NNo ratings yet
- Gardco: Standard Ford, Ford Dip, and Mini Ford Viscosity CupsDocument6 pagesGardco: Standard Ford, Ford Dip, and Mini Ford Viscosity CupsRuselkis FloresNo ratings yet
- Physical-ElectronicsDocument5 pagesPhysical-ElectronicsAlena BělaNo ratings yet
- Examly Level 2 - Test 4: Answer: 4991Document10 pagesExamly Level 2 - Test 4: Answer: 4991shark bugNo ratings yet
- Pat2manual PDFDocument516 pagesPat2manual PDFgrineldo84No ratings yet
- HD785-7 SEN01274-15 Shop Manual-1407-1607Document201 pagesHD785-7 SEN01274-15 Shop Manual-1407-1607Muhammad RizqiNo ratings yet
- Dark EnergyDocument66 pagesDark EnergyCiprian Bitca100% (1)
- LKG Math Shapes WorksheetDocument5 pagesLKG Math Shapes WorksheetankeshkatochNo ratings yet
- Crushable Foam Plasticity ModelsDocument11 pagesCrushable Foam Plasticity ModelsNayanaNo ratings yet
- Thermodynamic 01Document71 pagesThermodynamic 01udita PandeyNo ratings yet
- Ultimate Astrophysics Cheat Sheet 1 0Document58 pagesUltimate Astrophysics Cheat Sheet 1 0ณัฐพัชร ช่างเงินNo ratings yet
- 1000 YEARS RULE?... (A New Theory On " Kanni Theevu")Document10 pages1000 YEARS RULE?... (A New Theory On " Kanni Theevu")AJER JOURNALNo ratings yet
- Calibration Master Data BaseDocument60 pagesCalibration Master Data Basehunain zafarNo ratings yet
- Sci Worksheet W4 Act 1Document4 pagesSci Worksheet W4 Act 1Mae GuerreroNo ratings yet
- Language of Mathematics: (ContinuationDocument11 pagesLanguage of Mathematics: (ContinuationChristian ArtNo ratings yet
- Water Hydraulics Control Technology by Trostmann, ErikDocument193 pagesWater Hydraulics Control Technology by Trostmann, ErikYoel JenezNo ratings yet
- Solomon - Negative NRG in QEDDocument9 pagesSolomon - Negative NRG in QEDHomers SimpsonNo ratings yet
- 2406 Maths Paper With Solution MorningDocument9 pages2406 Maths Paper With Solution MorningAmit JomyNo ratings yet
- Modelling Short-And Open-Circuit Faults in Permanent Magnet Synchronous Machines Using ModelicaDocument7 pagesModelling Short-And Open-Circuit Faults in Permanent Magnet Synchronous Machines Using ModelicaAbir HezziNo ratings yet
- Momentum Exam Style QuestionsDocument6 pagesMomentum Exam Style QuestionsShaun RenjeevNo ratings yet
- Stanford University Most Stupid Professor Leonard SusskindDocument161 pagesStanford University Most Stupid Professor Leonard SusskindJoe Nahhas8% (13)
- Structural Analysis BookDocument124 pagesStructural Analysis Bookhkelvin201589% (35)
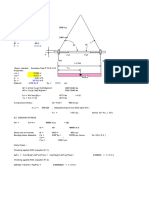
- Selecting Spreader Beam Check Beam For ES/EEC 1 Compression StressDocument2 pagesSelecting Spreader Beam Check Beam For ES/EEC 1 Compression StressSudar MyshaNo ratings yet
- FlagpolesDocument8 pagesFlagpolesPankaj_Taneja_9684No ratings yet
- Chapter 2 Part II Thermal ComfortDocument12 pagesChapter 2 Part II Thermal ComfortZahirah SaffriNo ratings yet
- XI Bridge CourseDocument2 pagesXI Bridge Courseburramokshitha88No ratings yet
- Astm C131-06 PDFDocument4 pagesAstm C131-06 PDFAshraf Tomizeh100% (1)
- EXP4Document13 pagesEXP4hello123No ratings yet
- Problem 10: Gauss-Seidelmethod: Import AsDocument1 pageProblem 10: Gauss-Seidelmethod: Import AsRoseller SumonodNo ratings yet