Download as pdf or txt
You might also like
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- CASE 2.1 - Tommy JohnDocument4 pagesCASE 2.1 - Tommy JohnRAJESH DHANAVATHNo ratings yet
- CH 10Document45 pagesCH 10hjhjhj ghhjhNo ratings yet
- Lecture 2Document22 pagesLecture 2Amir KhanNo ratings yet
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument22 pagesDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetiserichaasNo ratings yet
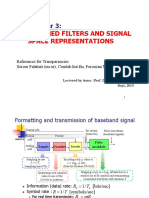
- C3 Signalspace2013 PDFDocument34 pagesC3 Signalspace2013 PDFthanhvinhegnNo ratings yet
- 3D Marine Seismic Survey Design PDFDocument129 pages3D Marine Seismic Survey Design PDFgeophenryNo ratings yet
- Bharat Electronics Limited Develops Signal Processor and Extractor For 3d Radar Surveillance SlidesDocument23 pagesBharat Electronics Limited Develops Signal Processor and Extractor For 3d Radar Surveillance SlidesShashank MuthaNo ratings yet
- Front-End Electronics and Data Acquisition inDocument61 pagesFront-End Electronics and Data Acquisition inY chenNo ratings yet
- Analog Transmitter and Receiver Concepts For Wireless Chirp Communication at 2.44GhzDocument49 pagesAnalog Transmitter and Receiver Concepts For Wireless Chirp Communication at 2.44GhzPhạm BìnhNo ratings yet
- Lecture13 ReceiverDocument42 pagesLecture13 Receivermiguel luqueNo ratings yet
- 07 ECE 3125 ECE 3242 - Nov 05 2012 - Formatting and Baseband Pulse ModulationDocument30 pages07 ECE 3125 ECE 3242 - Nov 05 2012 - Formatting and Baseband Pulse ModulationEng-Ahmed ShabellNo ratings yet
- MSC Petroleum Geoscience SMTDocument43 pagesMSC Petroleum Geoscience SMTSean YiyangNo ratings yet
- 003 TTC - The Coexistence of Etag and IMT Mobile System Research Report-20180913-EN PDFDocument35 pages003 TTC - The Coexistence of Etag and IMT Mobile System Research Report-20180913-EN PDFTurastoNo ratings yet
- Advance of UtDocument50 pagesAdvance of UtShyam Sundar GayenNo ratings yet
- Sistem TelekomunikasiDocument30 pagesSistem TelekomunikasiCindy Putry MaharaniNo ratings yet
- Basics of Digital CommunicationDocument41 pagesBasics of Digital CommunicationVAIBHAVNo ratings yet
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Document9 pagesEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- High Resolution Wide Swath SAR Imaging With Digital Beamforming - Performance Analysis, Optimization, System DesignDocument5 pagesHigh Resolution Wide Swath SAR Imaging With Digital Beamforming - Performance Analysis, Optimization, System DesignSimone MeschinoNo ratings yet
- Advanced Topics in Digital Signal ProcessingDocument23 pagesAdvanced Topics in Digital Signal ProcessingJadur RahmanNo ratings yet
- Chapter 6 - Random SignalsDocument18 pagesChapter 6 - Random SignalsFrances DiazNo ratings yet
- Spry 315Document11 pagesSpry 315vietNo ratings yet
- Satellite CommunicationsDocument57 pagesSatellite Communicationsheritage336No ratings yet
- Digital Signal Processing Notes-1 PDFDocument445 pagesDigital Signal Processing Notes-1 PDFWar Machine100% (2)
- Day4 Am PDFDocument101 pagesDay4 Am PDFanon_259267930No ratings yet
- Procssing 01Document81 pagesProcssing 01Djibril Idé AlphaNo ratings yet
- Lecture 3 ADocument22 pagesLecture 3 AChirawat KotchasarnNo ratings yet
- Demodulation and DetectionDocument10 pagesDemodulation and DetectionKamranKhanNo ratings yet
- Analog & Digital Signals1Document37 pagesAnalog & Digital Signals1kasim leeNo ratings yet
- CDR Tutorial by HPDocument103 pagesCDR Tutorial by HPYido KooNo ratings yet
- Department of Electronics & Telecommunication Engineering: Siddaganga Institute of Technology, Tumakuru-3Document57 pagesDepartment of Electronics & Telecommunication Engineering: Siddaganga Institute of Technology, Tumakuru-3Ayushman SharmaNo ratings yet
- Digital Signal Processing: Prof - Hansa ShingrakhiaDocument25 pagesDigital Signal Processing: Prof - Hansa Shingrakhiahansashingrakhia_ecNo ratings yet
- Radar HPCDocument4 pagesRadar HPCmohammad alaeeNo ratings yet
- OFDMf LectureDocument20 pagesOFDMf LectureKrishna Ram BudhathokiNo ratings yet
- Fundamental Overview and Simulation of MIMO Systems For Space-Time Coding and Spatial MultiplexingDocument31 pagesFundamental Overview and Simulation of MIMO Systems For Space-Time Coding and Spatial MultiplexingIsmail Ben MabroukNo ratings yet
- EE969-469 DSP Notes 2019Document118 pagesEE969-469 DSP Notes 2019joahua mickkinNo ratings yet
- D1T2a LTC2015 YounisDocument74 pagesD1T2a LTC2015 YounisRakeeb JauferNo ratings yet
- Wireless Communication Lecture 4Document10 pagesWireless Communication Lecture 4Ashish NautiyalNo ratings yet
- Indian Institute - A Review of Condition Based MaintenanceDocument38 pagesIndian Institute - A Review of Condition Based MaintenanceAlessandro CastagnaNo ratings yet
- RFID Radio Circuit Design in CMOSDocument46 pagesRFID Radio Circuit Design in CMOSpelikanul2004No ratings yet
- Digital Communication Unit 4Document119 pagesDigital Communication Unit 4mayur.chidrawar88No ratings yet
- SupAero Sujet BE Navigation S42013Document7 pagesSupAero Sujet BE Navigation S42013Al Anood Al AmeriNo ratings yet
- 0.4 Signal ParametersDocument29 pages0.4 Signal ParametersNaftal MassingueNo ratings yet
- Discrete Fourier Transform, DFTDocument18 pagesDiscrete Fourier Transform, DFTTANVIR AHMEDNo ratings yet
- RF ChainDocument82 pagesRF ChainbharanidharanNo ratings yet
- 35670A Dynamic Signal Analyzer: Keysight TechnologiesDocument10 pages35670A Dynamic Signal Analyzer: Keysight TechnologieselaineNo ratings yet
- 13 - ECE 3125 ECE 3242 - Nov 21 2012 - Baseband Demodulation and DetectionDocument18 pages13 - ECE 3125 ECE 3242 - Nov 21 2012 - Baseband Demodulation and DetectionEng-Ahmed ShabellNo ratings yet
- 4A17X087 - SSV - L 900 - Report - ZTEDocument37 pages4A17X087 - SSV - L 900 - Report - ZTEGhazali TaziNo ratings yet
- Poster PBLprojectDocument1 pagePoster PBLprojectmustafaNo ratings yet
- Rise Time and Spatial Resolution SlidesDocument10 pagesRise Time and Spatial Resolution SlidesRobert SavulescuNo ratings yet
- DM Adm OkDocument32 pagesDM Adm Okp17421183048 ANA MAWARNI MUSTIKAWATINo ratings yet
- Digital Modulation: December 7, 2021Document34 pagesDigital Modulation: December 7, 2021singhrichaNo ratings yet
- Digital Communication I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument22 pagesDigital Communication I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisMuhammad OwaisNo ratings yet
- Digital Signal Processing: Sampling of Continuous-Time SignalsDocument31 pagesDigital Signal Processing: Sampling of Continuous-Time SignalsHussam GujjarNo ratings yet
- CIC EdiDocument262 pagesCIC EdiPhan NamNo ratings yet
- Radar and NavigationDocument22 pagesRadar and NavigationSakshar KhuranaNo ratings yet
- SeminarDocument200 pagesSeminarMudassarNo ratings yet
- CH4-UMTS Protocol Stack & Physical LayerDocument17 pagesCH4-UMTS Protocol Stack & Physical LayerMohammed AbdullahNo ratings yet
- Brüel & Kjær Pulse Analyzer Platform: Pulse Continues To GrowDocument2 pagesBrüel & Kjær Pulse Analyzer Platform: Pulse Continues To GrowBrianna Daniela VARGAS MERMANo ratings yet
- 1983 - Bowman - Understanding and Conducting Event Studies - Journal of Business Finance & AccountingDocument24 pages1983 - Bowman - Understanding and Conducting Event Studies - Journal of Business Finance & AccountingJustinas BrazysNo ratings yet
- The Deodorant Market in India - FinalDocument6 pagesThe Deodorant Market in India - Finalabhisheklakh100% (4)
- Recipe Slow Cooker Chicken TacosDocument10 pagesRecipe Slow Cooker Chicken TacosVincent ReyesNo ratings yet
- Insights Into Formulation Technologies and Novel Strategies For The Design of Orally Disintegrating Dosage Forms: A Comprehensive Industrial ReviewDocument13 pagesInsights Into Formulation Technologies and Novel Strategies For The Design of Orally Disintegrating Dosage Forms: A Comprehensive Industrial ReviewROBINNo ratings yet
- TLETVL HECookery 9 11 Q3 Module 1Document26 pagesTLETVL HECookery 9 11 Q3 Module 1Ya SiNo ratings yet
- Andal BEED3B HomeLearningSupport&ReadingPerformance C1-3Document30 pagesAndal BEED3B HomeLearningSupport&ReadingPerformance C1-3Arcel SorianoNo ratings yet
- Arubaos Rfprotect Module: Data SheetDocument3 pagesArubaos Rfprotect Module: Data SheetWK OngNo ratings yet
- Major Ammonia Leak From HP Ammonia Feed Pump2Document3 pagesMajor Ammonia Leak From HP Ammonia Feed Pump2Rana ImtiazNo ratings yet
- Advanced Flight ManeuversDocument12 pagesAdvanced Flight ManeuversNath AnielNo ratings yet
- Ethics Education Package Order FormDocument1 pageEthics Education Package Order Formlinm@kilvington.vic.edu.auNo ratings yet
- Authors BookDocument189 pagesAuthors Bookمحمد رضا رضوانیNo ratings yet
- Evaluating Conflicting Evidence Lesson Summary - History DetectivesDocument5 pagesEvaluating Conflicting Evidence Lesson Summary - History Detectivescorbinmoore1No ratings yet
- RSER Author Checklist TableDocument3 pagesRSER Author Checklist Tablerash4344No ratings yet
- Top Model Compos (Latest Edition)Document60 pagesTop Model Compos (Latest Edition)SHEN JUNXI HCINo ratings yet
- Guia de Estudio Aguilar Romero Claudia Angelica 109Document3 pagesGuia de Estudio Aguilar Romero Claudia Angelica 109claudia aguilarNo ratings yet
- CO2 Capture in Shells and CoralsDocument7 pagesCO2 Capture in Shells and CoralsCarla Carbonell CansecoNo ratings yet
- Unit 3 Prepare and Interpret Technical DrawingDocument20 pagesUnit 3 Prepare and Interpret Technical Drawingtracert_atanNo ratings yet
- Krishna PDFCVDocument4 pagesKrishna PDFCVAVS InfraNo ratings yet
- Toilet False Ceiling PlanDocument1 pageToilet False Ceiling PlanPooja JabadeNo ratings yet
- Fast Food Nation Book ThesisDocument7 pagesFast Food Nation Book Thesistfwysnikd100% (2)
- IJSARTV6I738053Document3 pagesIJSARTV6I738053VISHAL BHOJWANINo ratings yet
- PICA Hose Problem - Sept-Nov 2012Document20 pagesPICA Hose Problem - Sept-Nov 2012Edwin FitrianNo ratings yet
- PCE Nautilus en 20130318Document2 pagesPCE Nautilus en 20130318Iker BasqueAdventureNo ratings yet
- Annotated BibliographyDocument4 pagesAnnotated BibliographyMichaella LauritoNo ratings yet
- 7 PDFDocument6 pages7 PDFjoseNo ratings yet
- Policy Guideliness For Community Radio in KenyaDocument36 pagesPolicy Guideliness For Community Radio in KenyaAmos Ochieng100% (1)
- By: Saurabh S SawhneyDocument28 pagesBy: Saurabh S SawhneyMaria100% (1)
- Chapter 8 NematodesDocument5 pagesChapter 8 NematodesJuju GalangNo ratings yet
- Introduction To Strategic Management: Topic OutlineDocument7 pagesIntroduction To Strategic Management: Topic OutlineJoyce DuaNo ratings yet