Download as pdf or txt
You might also like
- Signals and Systems 2Nd Edition Oppenheim Solutions Manual Full Chapter PDFDocument67 pagesSignals and Systems 2Nd Edition Oppenheim Solutions Manual Full Chapter PDFnettleshrill.gpkga100% (14)
- Tolonges QuestionDocument12 pagesTolonges QuestionSheryl Bernabe67% (12)
- Bansal Classes Chemistry Study Material For IIT JEEDocument445 pagesBansal Classes Chemistry Study Material For IIT JEESankar Kumarasamy100% (5)
- AS4041 ASME B31 - 3 Pipe Wall ThicknessDocument11 pagesAS4041 ASME B31 - 3 Pipe Wall Thicknessamini_mohiNo ratings yet
- Composite Boiler AalborgDocument2 pagesComposite Boiler Aalborghpss77100% (1)
- JTD - 2C - 13 - Delta ModulationDocument11 pagesJTD - 2C - 13 - Delta Modulationhillyatul auliaNo ratings yet
- Analog To Digital ConverterDocument11 pagesAnalog To Digital ConverterRaymond HartonoNo ratings yet
- Delta Sigma AD Conversion Technique OverviewDocument11 pagesDelta Sigma AD Conversion Technique Overviewyzhao148No ratings yet
- Msme Technology Center, Jamshedpur: Indo Danish Tool RoomDocument160 pagesMsme Technology Center, Jamshedpur: Indo Danish Tool RoomShivam SinghNo ratings yet
- Dac If Xapp154Document8 pagesDac If Xapp154mubujeeNo ratings yet
- Adc and DacDocument5 pagesAdc and DaceswaranNo ratings yet
- Module 7Document72 pagesModule 7sai manikantaNo ratings yet
- High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDocument6 pagesHigh Accuracy Impedance Measurements Using 12-Bit Impedance Converterschristobal_huntaNo ratings yet
- That An103Document8 pagesThat An103Andrea StipaNo ratings yet
- ADC Test Book FinalDocument25 pagesADC Test Book FinalMohammed MohammedaliNo ratings yet
- Ssm2120 2 ExpanderDocument12 pagesSsm2120 2 ExpandershirtquittersNo ratings yet
- Low Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron TechnologyDocument5 pagesLow Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron Technologyeditor_ijtel100% (1)
- AD and DA Converter PrinciplesDocument18 pagesAD and DA Converter PrincipleskarkeraNo ratings yet
- Mbed CH 4 v1Document15 pagesMbed CH 4 v1Brian YehNo ratings yet
- PlanetAnalog Parte 2Document6 pagesPlanetAnalog Parte 2aladino23No ratings yet
- Inter Grating AdcDocument6 pagesInter Grating AdcthắngNo ratings yet
- Multiple Feedback CircuitDocument7 pagesMultiple Feedback CircuitbelmontNo ratings yet
- Design of LiDAR SystemDocument9 pagesDesign of LiDAR Systemdipak1304No ratings yet
- Intro To ADCs FinalDocument58 pagesIntro To ADCs FinalAnonymous SsPiDQgphF100% (1)
- Digital Signal Processing SchemaDocument5 pagesDigital Signal Processing SchemaDragan IvanovNo ratings yet
- An101a Appln Notes On CompDocument4 pagesAn101a Appln Notes On CompAditya K NNo ratings yet
- An5537 How To Use Adc Oversampling Techniques To Improve Signaltonoise Ratio On Stm32 Mcus StmicroelectronicsDocument29 pagesAn5537 How To Use Adc Oversampling Techniques To Improve Signaltonoise Ratio On Stm32 Mcus StmicroelectronicsTran Truong PhanNo ratings yet
- V1-Using The ADC of 80C552Document18 pagesV1-Using The ADC of 80C552Dams Ruc100% (1)
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 pagesTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaNo ratings yet
- ChoppingDocument4 pagesChoppingRohit BanerjeeNo ratings yet
- Digital-to-Analog Analog-to-Digital: Dr. Syed Faiz AhmedDocument69 pagesDigital-to-Analog Analog-to-Digital: Dr. Syed Faiz AhmedmuraliNo ratings yet
- ECE462 Motor Lab Experiment3Document14 pagesECE462 Motor Lab Experiment3eng_abdelghany1979No ratings yet
- Corporation: The Mathematics of Log-Based Dynamic ProcessorsDocument4 pagesCorporation: The Mathematics of Log-Based Dynamic ProcessorsSimone EgidiNo ratings yet
- Analog To Digital Converters: Byron Johns Danny Carpenter Stephanie Pohl Harry "Bo" MarrDocument39 pagesAnalog To Digital Converters: Byron Johns Danny Carpenter Stephanie Pohl Harry "Bo" MarrTyasNo ratings yet
- Channel Estimation in Millimeter Wave MIMO Systems With One-Bit QuantizationDocument5 pagesChannel Estimation in Millimeter Wave MIMO Systems With One-Bit QuantizationNguyễn Minh TrìnhNo ratings yet
- Analog To Digital (ADC) and Digital To Analog (DAC) ConvertersDocument12 pagesAnalog To Digital (ADC) and Digital To Analog (DAC) ConvertersIoana IoanaNo ratings yet
- Analog To Digital ConverterDocument57 pagesAnalog To Digital ConverterAnurag Chauhan100% (1)
- Benefits of Delta-Sigma Analog-to-Digital ConversionDocument5 pagesBenefits of Delta-Sigma Analog-to-Digital ConversionmaryussoNo ratings yet
- PWM DacDocument19 pagesPWM DacgacalaNo ratings yet
- Sboa 292 ADocument6 pagesSboa 292 Ajrmmelo03No ratings yet
- Oregon State OR 9733 I, USA: Jipeng Gil-Cho Ahn, Dong-Young Chang, and Un-Ku MoonDocument4 pagesOregon State OR 9733 I, USA: Jipeng Gil-Cho Ahn, Dong-Young Chang, and Un-Ku MoonAlex WongNo ratings yet
- Virtex Analog To Digital Converter: Application NoteDocument8 pagesVirtex Analog To Digital Converter: Application NoteTulasi RadhikaNo ratings yet
- Thesis 1Document152 pagesThesis 1api-3834272100% (2)
- Ad7 710Document28 pagesAd7 710thinh nguyenNo ratings yet
- ADC and DAC PDFDocument23 pagesADC and DAC PDFMahendraLiyanageNo ratings yet
- Analog To Digital ConverterDocument7 pagesAnalog To Digital Convertersaima alamNo ratings yet
- AD - AN406 7714 SigmaDocument12 pagesAD - AN406 7714 SigmaCarlos CorreiaNo ratings yet
- M5 CH3 Adc DacDocument4 pagesM5 CH3 Adc DacMilan PjNo ratings yet
- Dual Channel ADC: Using FPGA Development Board Spartan 3EDocument49 pagesDual Channel ADC: Using FPGA Development Board Spartan 3EVijay VijaybhatNo ratings yet
- PFC Boost Calculation TI PDFDocument15 pagesPFC Boost Calculation TI PDFshawn liNo ratings yet
- High Resolution Delta-Sigma Adcs: Slide 1Document64 pagesHigh Resolution Delta-Sigma Adcs: Slide 1Sarawut PhetsilpNo ratings yet
- Chapter 2Document63 pagesChapter 2Mohammad ja'farNo ratings yet
- Digital Communication Lab: Delta ModulationDocument8 pagesDigital Communication Lab: Delta ModulationAthul Zac JosephNo ratings yet
- ADIC ExperimentsDocument41 pagesADIC ExperimentsTushar PatilNo ratings yet
- Experiment No. 6: Objective: ApparatusDocument4 pagesExperiment No. 6: Objective: ApparatusNioNo ratings yet
- 1V 10-Bit Successive Approximation ADC For Low Power Biomedical ApplicationsDocument4 pages1V 10-Bit Successive Approximation ADC For Low Power Biomedical ApplicationsSounakDuttaNo ratings yet
- Analog To Digital Converter ADC: Lecturer Mohand LokmanDocument23 pagesAnalog To Digital Converter ADC: Lecturer Mohand LokmanMohamd barcaNo ratings yet
- Lesson Adc PWMDocument36 pagesLesson Adc PWMDavidRubeomNo ratings yet
- ADXL202/ADXL210: F C (X, Y) F CDocument1 pageADXL202/ADXL210: F C (X, Y) F CmhasansharifiNo ratings yet
- ConvertersDocument54 pagesConvertersyoboiiii649No ratings yet
- Uni-Kl Adc-Review Jan03 5782 PDFDocument33 pagesUni-Kl Adc-Review Jan03 5782 PDFMiguel BrunoNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 20EE10094 - Surendra Reddy Gaddam - Lab Report - Expt 1Document18 pages20EE10094 - Surendra Reddy Gaddam - Lab Report - Expt 1SSSSSSSSSSSSNo ratings yet
- 6.P Block ElementsDocument24 pages6.P Block ElementsSSSSSSSSSSSSNo ratings yet
- Hostel Fee For The Academic Year 2018-19 v1 Djb1gutDocument3 pagesHostel Fee For The Academic Year 2018-19 v1 Djb1gutSSSSSSSSSSSSNo ratings yet
- Isro and It'S Achivements: BY:-G .Surendra Reddy Class XBDocument17 pagesIsro and It'S Achivements: BY:-G .Surendra Reddy Class XBSSSSSSSSSSSSNo ratings yet
- Ufo'S (Unidentified Flying Objects) : Fa - Iii ActivityDocument9 pagesUfo'S (Unidentified Flying Objects) : Fa - Iii ActivitySSSSSSSSSSSSNo ratings yet
- Mangalyaan 131201091847 Phpapp02Document16 pagesMangalyaan 131201091847 Phpapp02SSSSSSSSSSSSNo ratings yet
- Employee Share Employer Share Employee Share Employer Share: Page 1 of 2Document2 pagesEmployee Share Employer Share Employee Share Employer Share: Page 1 of 2SSSSSSSSSSSSNo ratings yet
- Akash RPFDocument3 pagesAkash RPFSSSSSSSSSSSSNo ratings yet
- Ideas For School Green Teams: Waste ReductionDocument5 pagesIdeas For School Green Teams: Waste ReductionSSSSSSSSSSSSNo ratings yet
- AFT Fathom12 Product HelpDocument804 pagesAFT Fathom12 Product HelpJoel CNo ratings yet
- R.Espinar, S.L.: Instruction Manual For Use and MaintenanceDocument23 pagesR.Espinar, S.L.: Instruction Manual For Use and Maintenancemboudi thomasNo ratings yet
- Studies On Biosorption of Titan Yellow Dye With Hyptis Suaveolens Powder and Optimization Through Central Composite DesignDocument16 pagesStudies On Biosorption of Titan Yellow Dye With Hyptis Suaveolens Powder and Optimization Through Central Composite DesignInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hydraulics Module 5Document6 pagesHydraulics Module 5theengineerNo ratings yet
- Overview of MicroemulsionDocument13 pagesOverview of MicroemulsionEditor IJTSRDNo ratings yet
- A Model To Predict The Crop Based On Soil Properties Using Machine LearningDocument82 pagesA Model To Predict The Crop Based On Soil Properties Using Machine LearningDasari DeepakNo ratings yet
- Prysmian Group Baltics - Catalogue - PowerCables - EN 2022 AprilDocument46 pagesPrysmian Group Baltics - Catalogue - PowerCables - EN 2022 Aprilmt6760No ratings yet
- 05 12399 SGE BartosDocument13 pages05 12399 SGE BartosSanford SiegelNo ratings yet
- Text Extraction From Digital Images With Text To Speech Conversion and Language TranslationDocument3 pagesText Extraction From Digital Images With Text To Speech Conversion and Language TranslationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Physical Science DLP Q1W2Document7 pagesPhysical Science DLP Q1W2JennyMaeAguilarMeruNo ratings yet
- Appendix I - AirDocument155 pagesAppendix I - AirTown of Colonie LandfillNo ratings yet
- What Is Fsharp Microsoft DocumentDocument582 pagesWhat Is Fsharp Microsoft DocumentMaamar DliouahNo ratings yet
- IEEE Conference LaTeX Template 1Document6 pagesIEEE Conference LaTeX Template 1Aditya RajNo ratings yet
- Cvitanic - Sol, Introduction To The Economics and Mathematics of Financial MarketsDocument53 pagesCvitanic - Sol, Introduction To The Economics and Mathematics of Financial MarketsEKTemplarNo ratings yet
- Daewoo Sp200n Chassis Dpn4274nhs Plasma TV SMDocument60 pagesDaewoo Sp200n Chassis Dpn4274nhs Plasma TV SMdann222No ratings yet
- Periodic Classification of Elements: Multiple Choice QuestionsDocument10 pagesPeriodic Classification of Elements: Multiple Choice QuestionsAryanNo ratings yet
- Center of Gravity/Rear Face BLKDocument2 pagesCenter of Gravity/Rear Face BLKMiguel GutierrezNo ratings yet
- Slyt363.pdf Analog Applications JournalDocument41 pagesSlyt363.pdf Analog Applications JournalNWALLLNo ratings yet
- PMC 2, Input Output RobodrillDocument6 pagesPMC 2, Input Output RobodrillQuyen VuongNo ratings yet
- F-Unidrivesp PanelmountratingsDocument3 pagesF-Unidrivesp PanelmountratingsMarcosNo ratings yet
- Metals and Non-Metals 1Document32 pagesMetals and Non-Metals 1MindOfPrinceNo ratings yet
- Qos Command Reference, Cisco Ios Release 15.2 (2) E (Catalyst 2960-X Switch)Document120 pagesQos Command Reference, Cisco Ios Release 15.2 (2) E (Catalyst 2960-X Switch)AHOUALAKOUNNo ratings yet
- Dbms Imp NotesDocument5 pagesDbms Imp NotesRishi Raj K0% (1)
- Copeland 1997Document16 pagesCopeland 1997Fouzia BouchelaghemNo ratings yet
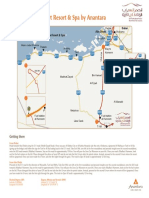
- Qasr Al Sarab Desert Resort Location Map June2012Document1 pageQasr Al Sarab Desert Resort Location Map June2012Anant GârgNo ratings yet
- How To Remove Duplicate Rows Without Using DISTINCT or ROWID or GROUP by Methods in OracleDocument36 pagesHow To Remove Duplicate Rows Without Using DISTINCT or ROWID or GROUP by Methods in OracleSumit K0% (1)