
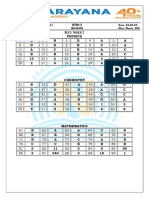
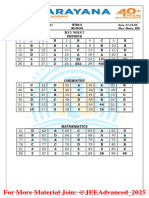
Xi Iit Ic & Ir Cftm-04!6!11 2023 Key & Solution
Xi Iit Ic & Ir Cftm-04!6!11 2023 Key & Solution
You might also like
- VDA - AK 8D Definition of Failure Cause Categories For 8D ReportingDocument8 pagesVDA - AK 8D Definition of Failure Cause Categories For 8D ReportingCiprian Raileanu100% (1)
- 30-06-24 - SR - IIT - STAR CO-SC (MODEL-A) - Jee-Main - CTM-13 - KEY & SOLDocument21 pages30-06-24 - SR - IIT - STAR CO-SC (MODEL-A) - Jee-Main - CTM-13 - KEY & SOLJaimukeshNo ratings yet
- 24 12 23 - SR STAR CO SC (MODEL) GTM-2 SolDocument16 pages24 12 23 - SR STAR CO SC (MODEL) GTM-2 Solyamala venkateswarluNo ratings yet
- 28-01-24_JR.IIT_STAR CO-SC(MODEL-A)_Jee-Main_CTM-9_KEY & SOLDocument15 pages28-01-24_JR.IIT_STAR CO-SC(MODEL-A)_Jee-Main_CTM-9_KEY & SOLJaimukeshNo ratings yet
- 08 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 10n Key&sDocument16 pages08 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 10n Key&sReddyNo ratings yet
- 09.01.24 SR - Star Co-Sc (Model-A, B&C) Jee Main Gtm-11 (N) Key & SolDocument15 pages09.01.24 SR - Star Co-Sc (Model-A, B&C) Jee Main Gtm-11 (N) Key & Solgarenafreefire6600No ratings yet
- 31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&SolDocument10 pages31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&Solprabha79gmNo ratings yet
- XI-IIT-IC & IR - CFTM-2 - 02 - 10 - 2023 Key & SolDocument8 pagesXI-IIT-IC & IR - CFTM-2 - 02 - 10 - 2023 Key & Soliitb.akkharcheNo ratings yet
- 24.12.23 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-2 - KEY&SOLDocument16 pages24.12.23 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-2 - KEY&SOLharsha.vijay1075No ratings yet
- NR GTM-24 KEYDocument12 pagesNR GTM-24 KEYngpresidntNo ratings yet
- NR GTM-22 KEYDocument16 pagesNR GTM-22 KEYngpresidntNo ratings yet
- CPT - 3 - XII IC CF - Mains Paper - 31-05-2021 - KeyDocument16 pagesCPT - 3 - XII IC CF - Mains Paper - 31-05-2021 - KeyARYAN PANDEYNo ratings yet
- 24 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 2 Key&SolDocument16 pages24 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 2 Key&SolReddyNo ratings yet
- Xii Stud Iit - FTM-06 - 31 - 07 - 2023 - KeyDocument9 pagesXii Stud Iit - FTM-06 - 31 - 07 - 2023 - KeyDinesh BabuNo ratings yet
- 413K_Advanc Test 15_Date 16.04.2024_Sol (4)Document12 pages413K_Advanc Test 15_Date 16.04.2024_Sol (4)harshitsahu1907No ratings yet
- 31-07-2023 - SR - Star Co-Sc (Modela&-B) - Jee - Main - WTM-3 - Key&solDocument10 pages31-07-2023 - SR - Star Co-Sc (Modela&-B) - Jee - Main - WTM-3 - Key&solJeswin Jose IX BNo ratings yet
- 25.09.22 - SR - STAR CO-SC (MODEL-B) - Jee - Main - CTM-1 - KEY & SOLDocument12 pages25.09.22 - SR - STAR CO-SC (MODEL-B) - Jee - Main - CTM-1 - KEY & SOLSanthosh GoparajuNo ratings yet
- (@bohring - Bot × @JEE - Tests) GTA-17 - P1 - Key & Sol'sDocument12 pages(@bohring - Bot × @JEE - Tests) GTA-17 - P1 - Key & Sol'sVinod AgrawalNo ratings yet
- 09 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 11n Key&sDocument15 pages09 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 11n Key&sReddyNo ratings yet
- WTM - XII-IC - CF - 18.4.22 - Key & Sol.Document12 pagesWTM - XII-IC - CF - 18.4.22 - Key & Sol.Kripanshu KaushikNo ratings yet
- Sri Chaitanya IIT Academy., India.: A Right Choice For The Real AspirantDocument11 pagesSri Chaitanya IIT Academy., India.: A Right Choice For The Real AspirantPranayNo ratings yet
- FTM - 2 - Xi-Ir - Iit - 10 - 07 - 2023 - Key - SolDocument8 pagesFTM - 2 - Xi-Ir - Iit - 10 - 07 - 2023 - Key - Solsamarthsingla49No ratings yet
- GTM 5 KeyDocument24 pagesGTM 5 KeyRitabrata DindaNo ratings yet
- 21-04-24 - ISR - IIT - STAR CO-SC (MODEL-B - Jee-Main - CTM-36 - KEY & SOLDocument16 pages21-04-24 - ISR - IIT - STAR CO-SC (MODEL-B - Jee-Main - CTM-36 - KEY & SOLjofofaf427No ratings yet
- 09-12-2023 - SR - Elite & Target (C-120, C-Ipl & Ipl-Ic) - Jee Main - rptm-16 - Key & Sol'sDocument15 pages09-12-2023 - SR - Elite & Target (C-120, C-Ipl & Ipl-Ic) - Jee Main - rptm-16 - Key & Sol'samudalapalli.venkateswararaoNo ratings yet
- 25.06.20 SR.N-SC N-C Jee Main Ptm-6 Key SolutionsDocument5 pages25.06.20 SR.N-SC N-C Jee Main Ptm-6 Key SolutionsSubrata KarmakarNo ratings yet
- 31 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 4 Key&SolDocument16 pages31 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 4 Key&SolReddyNo ratings yet
- 09 07 23 JR STAR CO SCMODEL A Jee Main CTM 3 KEY & SOL 1Document19 pages09 07 23 JR STAR CO SCMODEL A Jee Main CTM 3 KEY & SOL 1Tanay1 MitraNo ratings yet
- 2022 Mock JEE Main-3 - SolutionsDocument15 pages2022 Mock JEE Main-3 - SolutionsAshish GuleriaNo ratings yet
- 28-11-22 - JR - Iit - Star Co-Sc - Model-A - Jee Adv - 2018 - P-Ii - Cat-8 - Key & Sol - FDocument11 pages28-11-22 - JR - Iit - Star Co-Sc - Model-A - Jee Adv - 2018 - P-Ii - Cat-8 - Key & Sol - Fzaid khanNo ratings yet
- Xii Pass Iit Ic Revt-01m 19-02-2024 KeyDocument12 pagesXii Pass Iit Ic Revt-01m 19-02-2024 Keyharigirija516No ratings yet
- 28-11-22 JR - Iit Star Co-Sc Model-A Jee Adv 2018 P-II Cat-8 Key & Sol FDocument11 pages28-11-22 JR - Iit Star Co-Sc Model-A Jee Adv 2018 P-II Cat-8 Key & Sol Fzaid khanNo ratings yet
- 25.06.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-3 - Key&solDocument14 pages25.06.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-3 - Key&solAnonymous A6Jnef04No ratings yet
- 26.11.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-10 - KEY & SOLDocument12 pages26.11.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-10 - KEY & SOLzaid khanNo ratings yet
- ISR - IIT - STAR CO-SC (MODEL-B) - Jee-Main - CTM-34 - KEY&SOLDocument16 pagesISR - IIT - STAR CO-SC (MODEL-B) - Jee-Main - CTM-34 - KEY&SOLnobihav525No ratings yet
- 31.10.22 - SR - STAR CO-SC (MODEL-A&B) - Jee - Adv - 2019 - P1 - PTA-6 - KEY & SOLDocument12 pages31.10.22 - SR - STAR CO-SC (MODEL-A&B) - Jee - Adv - 2019 - P1 - PTA-6 - KEY & SOLOrganic PrasadNo ratings yet
- 24-12-18 JR - Iit IZ Jee-Main CTM-05 Key & Sol'sDocument16 pages24-12-18 JR - Iit IZ Jee-Main CTM-05 Key & Sol'sM jhansiNo ratings yet
- 21.12.23 SR - Star Co-Sc (Model-A, B C) Jee Main Gtm-1 Key SolDocument15 pages21.12.23 SR - Star Co-Sc (Model-A, B C) Jee Main Gtm-1 Key Solintelligentc47No ratings yet
- Assessment # 33 (P - I) Ans - Key & SolutionDocument11 pagesAssessment # 33 (P - I) Ans - Key & SolutionAshwin KoradeNo ratings yet
- 21 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 1 Key&SolDocument15 pages21 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 1 Key&SolReddyNo ratings yet
- 05-05-2024 - SR - Super60 (Incoming) - NUCLEUS & STERLING BT - Jee-Adv (2022-P1) - CTA-33&CTA-07 - (QAT-07) - Key & Sol'sDocument12 pages05-05-2024 - SR - Super60 (Incoming) - NUCLEUS & STERLING BT - Jee-Adv (2022-P1) - CTA-33&CTA-07 - (QAT-07) - Key & Sol'skommidi.srijanreddyNo ratings yet
- Ray Optics Assign Ment SolDocument18 pagesRay Optics Assign Ment SolAyush ChouhanNo ratings yet
- XI IIT IR FTM-03 24.07.2023 Key SolDocument9 pagesXI IIT IR FTM-03 24.07.2023 Key Soliitb.akkharcheNo ratings yet
- 17.09.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-14 - Key & SolDocument16 pages17.09.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-14 - Key & Solholaheg352No ratings yet
- 18.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-20 (N) - KEY & SOLDocument12 pages18.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-20 (N) - KEY & SOLsbpathuriNo ratings yet
- Answer KeyDocument3 pagesAnswer KeyVineet.No ratings yet
- 27-12-18 SR - Iit-Iz-Co Spark Jee-Main Surprise Test (GTM) Key & SolsDocument13 pages27-12-18 SR - Iit-Iz-Co Spark Jee-Main Surprise Test (GTM) Key & SolsM jhansiNo ratings yet
- 26-01-20 SR - Iit N-Super Chaina&N-chaina P-II Jee-Main Ph-III Gtm-01 Key & SolDocument10 pages26-01-20 SR - Iit N-Super Chaina&N-chaina P-II Jee-Main Ph-III Gtm-01 Key & SolabcNo ratings yet
- 14-07-24_SR.IIT_STAR CO-SC(MODEL-A)_JEE ADV_2018(P-II)_CAT-35_KEY & SOLDocument12 pages14-07-24_SR.IIT_STAR CO-SC(MODEL-A)_JEE ADV_2018(P-II)_CAT-35_KEY & SOLJaimukeshNo ratings yet
- Sri Chaitanya IIT Academy., India.: KEY SheetDocument10 pagesSri Chaitanya IIT Academy., India.: KEY Sheetnithila bhaskerNo ratings yet
- 2024 Mock JEE Main 10 - SolutionsDocument17 pages2024 Mock JEE Main 10 - SolutionsAranyaman MohanNo ratings yet
- 01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sDocument15 pages01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- 26 07 15 JR - Iit Iz Co Spark Jee Adv (2013 p1) Wta 11 Key & Sol'sDocument10 pages26 07 15 JR - Iit Iz Co Spark Jee Adv (2013 p1) Wta 11 Key & Sol'srahulNo ratings yet
- Narayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolDocument12 pagesNarayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolYuva AkhilNo ratings yet
- 07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P2 - Key & Sol'sDocument13 pages07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P2 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- CPT-04 Key Sheet: PhysicsDocument10 pagesCPT-04 Key Sheet: Physicsmanoj singhNo ratings yet
- 13 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 15n Key&sDocument16 pages13 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 15n Key&sReddyNo ratings yet
- 21-04-2024 - SR C-120 - Jee-Adv (2021-P1) - WTA-30 - Key & Sol'sDocument13 pages21-04-2024 - SR C-120 - Jee-Adv (2021-P1) - WTA-30 - Key & Sol'sbsahil2007No ratings yet
- Key&Solutions: MathematicsDocument10 pagesKey&Solutions: MathematicsDharmik Pawan KumarNo ratings yet
- 21 - 12 - 23 - GTM01 - SR - STAR - CO - SCMODELanswer KeyDocument15 pages21 - 12 - 23 - GTM01 - SR - STAR - CO - SCMODELanswer KeyMayank Kashyap100% (1)
- CL Liquid Ring Vacuum Pumps and CompressorsDocument0 pagesCL Liquid Ring Vacuum Pumps and CompressorsCarlos TomeyNo ratings yet
- 2 Comparative Analysis of Moisture RemovingDocument7 pages2 Comparative Analysis of Moisture Removing15472No ratings yet
- Shankar Quantum Mechanics SolutionDocument327 pagesShankar Quantum Mechanics Solutionvinay PALNo ratings yet
- Compressive Properties of Rigid Plastics: Standard Test Method ForDocument7 pagesCompressive Properties of Rigid Plastics: Standard Test Method ForAsep Aby SaputraNo ratings yet
- T800 - Industrial Electronics N6 QP April 2019Document10 pagesT800 - Industrial Electronics N6 QP April 2019Kelsey BothaNo ratings yet
- MCQ On Safety ManagementDocument5 pagesMCQ On Safety ManagementKishor Patil72% (32)
- G. Boothroyd, Fundamentals of Metal Machining and Machine Tools.Document89 pagesG. Boothroyd, Fundamentals of Metal Machining and Machine Tools.n100% (1)
- A Laboratory-Centered Approach To Introducing Engineering Students To Electric Circuit and Electric Systems ConceptsDocument6 pagesA Laboratory-Centered Approach To Introducing Engineering Students To Electric Circuit and Electric Systems ConceptsVia Marie MesaNo ratings yet
- Modulus of Subgrade Reaction That Varies With Magnitude of Displacement of Cohesionless SoilDocument8 pagesModulus of Subgrade Reaction That Varies With Magnitude of Displacement of Cohesionless SoilSubinay Saha RoyNo ratings yet
- 2537 VD4G-50 Vacuum Circuit-Breaker GBDocument4 pages2537 VD4G-50 Vacuum Circuit-Breaker GBburvanov0% (1)
- (1991) Hornik (Neural Netw.)Document7 pages(1991) Hornik (Neural Netw.)MaxNo ratings yet
- Ucmp Unit-5Document77 pagesUcmp Unit-5Rashida BegumNo ratings yet
- Intoval T62Document1 pageIntoval T62Calvin Cookson100% (1)
- Tribon M2 - SurfaceDocument68 pagesTribon M2 - SurfaceLary Lysu100% (1)
- John Crane MaterialsDocument46 pagesJohn Crane MaterialsLuis YañezNo ratings yet
- Development of The Atomic TheoryDocument10 pagesDevelopment of The Atomic TheorysleepyanyaNo ratings yet
- Portamess911pH 911XpH InstructionManualDocument52 pagesPortamess911pH 911XpH InstructionManualEvandro De Souza RamosNo ratings yet
- Test To PassDocument7 pagesTest To Passayushbhardwaj181820No ratings yet
- Heat and Mass Transfer RajputDocument919 pagesHeat and Mass Transfer RajputNS MusicalNo ratings yet
- TEPZZ 8576Z A - T: European Patent ApplicationDocument11 pagesTEPZZ 8576Z A - T: European Patent ApplicationbrunosamaeianNo ratings yet
- Sec.6 - Class C Heat ExchangerDocument33 pagesSec.6 - Class C Heat ExchangerAgung Dewandaru MahatmantoNo ratings yet
- Analysis of Energy Efficient PTL Based Full Adders Using Different Nanometer TechnologiesDocument6 pagesAnalysis of Energy Efficient PTL Based Full Adders Using Different Nanometer TechnologiesDwarakaManeekantaAddagiriNo ratings yet
- Oil Field ManagerDocument3 pagesOil Field ManagerWalter Eloy Ramirez CarranzaNo ratings yet
- Math Cidam - PrecalculusDocument8 pagesMath Cidam - PrecalculusAmy Mendiola100% (1)
- NDT One MarkDocument11 pagesNDT One MarkAnonymous 6SivdzjNo ratings yet
- Lab 2Document13 pagesLab 2ahmedNo ratings yet
- Gis LecDocument6 pagesGis LecNiño Mar CenaNo ratings yet
- Asme PTC 38Document133 pagesAsme PTC 38Anonymous knICax100% (1)
- Development of AerofoilDocument6 pagesDevelopment of Aerofoilvaisakp777No ratings yet
























































































Download as pdf or txt
You might also like
- VDA - AK 8D Definition of Failure Cause Categories For 8D ReportingDocument8 pagesVDA - AK 8D Definition of Failure Cause Categories For 8D ReportingCiprian Raileanu100% (1)
- 30-06-24 - SR - IIT - STAR CO-SC (MODEL-A) - Jee-Main - CTM-13 - KEY & SOLDocument21 pages30-06-24 - SR - IIT - STAR CO-SC (MODEL-A) - Jee-Main - CTM-13 - KEY & SOLJaimukeshNo ratings yet
- 24 12 23 - SR STAR CO SC (MODEL) GTM-2 SolDocument16 pages24 12 23 - SR STAR CO SC (MODEL) GTM-2 Solyamala venkateswarluNo ratings yet
- 28-01-24_JR.IIT_STAR CO-SC(MODEL-A)_Jee-Main_CTM-9_KEY & SOLDocument15 pages28-01-24_JR.IIT_STAR CO-SC(MODEL-A)_Jee-Main_CTM-9_KEY & SOLJaimukeshNo ratings yet
- 08 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 10n Key&sDocument16 pages08 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 10n Key&sReddyNo ratings yet
- 09.01.24 SR - Star Co-Sc (Model-A, B&C) Jee Main Gtm-11 (N) Key & SolDocument15 pages09.01.24 SR - Star Co-Sc (Model-A, B&C) Jee Main Gtm-11 (N) Key & Solgarenafreefire6600No ratings yet
- 31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&SolDocument10 pages31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&Solprabha79gmNo ratings yet
- XI-IIT-IC & IR - CFTM-2 - 02 - 10 - 2023 Key & SolDocument8 pagesXI-IIT-IC & IR - CFTM-2 - 02 - 10 - 2023 Key & Soliitb.akkharcheNo ratings yet
- 24.12.23 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-2 - KEY&SOLDocument16 pages24.12.23 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-2 - KEY&SOLharsha.vijay1075No ratings yet
- NR GTM-24 KEYDocument12 pagesNR GTM-24 KEYngpresidntNo ratings yet
- NR GTM-22 KEYDocument16 pagesNR GTM-22 KEYngpresidntNo ratings yet
- CPT - 3 - XII IC CF - Mains Paper - 31-05-2021 - KeyDocument16 pagesCPT - 3 - XII IC CF - Mains Paper - 31-05-2021 - KeyARYAN PANDEYNo ratings yet
- 24 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 2 Key&SolDocument16 pages24 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 2 Key&SolReddyNo ratings yet
- Xii Stud Iit - FTM-06 - 31 - 07 - 2023 - KeyDocument9 pagesXii Stud Iit - FTM-06 - 31 - 07 - 2023 - KeyDinesh BabuNo ratings yet
- 413K_Advanc Test 15_Date 16.04.2024_Sol (4)Document12 pages413K_Advanc Test 15_Date 16.04.2024_Sol (4)harshitsahu1907No ratings yet
- 31-07-2023 - SR - Star Co-Sc (Modela&-B) - Jee - Main - WTM-3 - Key&solDocument10 pages31-07-2023 - SR - Star Co-Sc (Modela&-B) - Jee - Main - WTM-3 - Key&solJeswin Jose IX BNo ratings yet
- 25.09.22 - SR - STAR CO-SC (MODEL-B) - Jee - Main - CTM-1 - KEY & SOLDocument12 pages25.09.22 - SR - STAR CO-SC (MODEL-B) - Jee - Main - CTM-1 - KEY & SOLSanthosh GoparajuNo ratings yet
- (@bohring - Bot × @JEE - Tests) GTA-17 - P1 - Key & Sol'sDocument12 pages(@bohring - Bot × @JEE - Tests) GTA-17 - P1 - Key & Sol'sVinod AgrawalNo ratings yet
- 09 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 11n Key&sDocument15 pages09 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 11n Key&sReddyNo ratings yet
- WTM - XII-IC - CF - 18.4.22 - Key & Sol.Document12 pagesWTM - XII-IC - CF - 18.4.22 - Key & Sol.Kripanshu KaushikNo ratings yet
- Sri Chaitanya IIT Academy., India.: A Right Choice For The Real AspirantDocument11 pagesSri Chaitanya IIT Academy., India.: A Right Choice For The Real AspirantPranayNo ratings yet
- FTM - 2 - Xi-Ir - Iit - 10 - 07 - 2023 - Key - SolDocument8 pagesFTM - 2 - Xi-Ir - Iit - 10 - 07 - 2023 - Key - Solsamarthsingla49No ratings yet
- GTM 5 KeyDocument24 pagesGTM 5 KeyRitabrata DindaNo ratings yet
- 21-04-24 - ISR - IIT - STAR CO-SC (MODEL-B - Jee-Main - CTM-36 - KEY & SOLDocument16 pages21-04-24 - ISR - IIT - STAR CO-SC (MODEL-B - Jee-Main - CTM-36 - KEY & SOLjofofaf427No ratings yet
- 09-12-2023 - SR - Elite & Target (C-120, C-Ipl & Ipl-Ic) - Jee Main - rptm-16 - Key & Sol'sDocument15 pages09-12-2023 - SR - Elite & Target (C-120, C-Ipl & Ipl-Ic) - Jee Main - rptm-16 - Key & Sol'samudalapalli.venkateswararaoNo ratings yet
- 25.06.20 SR.N-SC N-C Jee Main Ptm-6 Key SolutionsDocument5 pages25.06.20 SR.N-SC N-C Jee Main Ptm-6 Key SolutionsSubrata KarmakarNo ratings yet
- 31 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 4 Key&SolDocument16 pages31 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 4 Key&SolReddyNo ratings yet
- 09 07 23 JR STAR CO SCMODEL A Jee Main CTM 3 KEY & SOL 1Document19 pages09 07 23 JR STAR CO SCMODEL A Jee Main CTM 3 KEY & SOL 1Tanay1 MitraNo ratings yet
- 2022 Mock JEE Main-3 - SolutionsDocument15 pages2022 Mock JEE Main-3 - SolutionsAshish GuleriaNo ratings yet
- 28-11-22 - JR - Iit - Star Co-Sc - Model-A - Jee Adv - 2018 - P-Ii - Cat-8 - Key & Sol - FDocument11 pages28-11-22 - JR - Iit - Star Co-Sc - Model-A - Jee Adv - 2018 - P-Ii - Cat-8 - Key & Sol - Fzaid khanNo ratings yet
- Xii Pass Iit Ic Revt-01m 19-02-2024 KeyDocument12 pagesXii Pass Iit Ic Revt-01m 19-02-2024 Keyharigirija516No ratings yet
- 28-11-22 JR - Iit Star Co-Sc Model-A Jee Adv 2018 P-II Cat-8 Key & Sol FDocument11 pages28-11-22 JR - Iit Star Co-Sc Model-A Jee Adv 2018 P-II Cat-8 Key & Sol Fzaid khanNo ratings yet
- 25.06.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-3 - Key&solDocument14 pages25.06.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-3 - Key&solAnonymous A6Jnef04No ratings yet
- 26.11.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-10 - KEY & SOLDocument12 pages26.11.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-10 - KEY & SOLzaid khanNo ratings yet
- ISR - IIT - STAR CO-SC (MODEL-B) - Jee-Main - CTM-34 - KEY&SOLDocument16 pagesISR - IIT - STAR CO-SC (MODEL-B) - Jee-Main - CTM-34 - KEY&SOLnobihav525No ratings yet
- 31.10.22 - SR - STAR CO-SC (MODEL-A&B) - Jee - Adv - 2019 - P1 - PTA-6 - KEY & SOLDocument12 pages31.10.22 - SR - STAR CO-SC (MODEL-A&B) - Jee - Adv - 2019 - P1 - PTA-6 - KEY & SOLOrganic PrasadNo ratings yet
- 24-12-18 JR - Iit IZ Jee-Main CTM-05 Key & Sol'sDocument16 pages24-12-18 JR - Iit IZ Jee-Main CTM-05 Key & Sol'sM jhansiNo ratings yet
- 21.12.23 SR - Star Co-Sc (Model-A, B C) Jee Main Gtm-1 Key SolDocument15 pages21.12.23 SR - Star Co-Sc (Model-A, B C) Jee Main Gtm-1 Key Solintelligentc47No ratings yet
- Assessment # 33 (P - I) Ans - Key & SolutionDocument11 pagesAssessment # 33 (P - I) Ans - Key & SolutionAshwin KoradeNo ratings yet
- 21 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 1 Key&SolDocument15 pages21 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 1 Key&SolReddyNo ratings yet
- 05-05-2024 - SR - Super60 (Incoming) - NUCLEUS & STERLING BT - Jee-Adv (2022-P1) - CTA-33&CTA-07 - (QAT-07) - Key & Sol'sDocument12 pages05-05-2024 - SR - Super60 (Incoming) - NUCLEUS & STERLING BT - Jee-Adv (2022-P1) - CTA-33&CTA-07 - (QAT-07) - Key & Sol'skommidi.srijanreddyNo ratings yet
- Ray Optics Assign Ment SolDocument18 pagesRay Optics Assign Ment SolAyush ChouhanNo ratings yet
- XI IIT IR FTM-03 24.07.2023 Key SolDocument9 pagesXI IIT IR FTM-03 24.07.2023 Key Soliitb.akkharcheNo ratings yet
- 17.09.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-14 - Key & SolDocument16 pages17.09.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-14 - Key & Solholaheg352No ratings yet
- 18.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-20 (N) - KEY & SOLDocument12 pages18.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-20 (N) - KEY & SOLsbpathuriNo ratings yet
- Answer KeyDocument3 pagesAnswer KeyVineet.No ratings yet
- 27-12-18 SR - Iit-Iz-Co Spark Jee-Main Surprise Test (GTM) Key & SolsDocument13 pages27-12-18 SR - Iit-Iz-Co Spark Jee-Main Surprise Test (GTM) Key & SolsM jhansiNo ratings yet
- 26-01-20 SR - Iit N-Super Chaina&N-chaina P-II Jee-Main Ph-III Gtm-01 Key & SolDocument10 pages26-01-20 SR - Iit N-Super Chaina&N-chaina P-II Jee-Main Ph-III Gtm-01 Key & SolabcNo ratings yet
- 14-07-24_SR.IIT_STAR CO-SC(MODEL-A)_JEE ADV_2018(P-II)_CAT-35_KEY & SOLDocument12 pages14-07-24_SR.IIT_STAR CO-SC(MODEL-A)_JEE ADV_2018(P-II)_CAT-35_KEY & SOLJaimukeshNo ratings yet
- Sri Chaitanya IIT Academy., India.: KEY SheetDocument10 pagesSri Chaitanya IIT Academy., India.: KEY Sheetnithila bhaskerNo ratings yet
- 2024 Mock JEE Main 10 - SolutionsDocument17 pages2024 Mock JEE Main 10 - SolutionsAranyaman MohanNo ratings yet
- 01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sDocument15 pages01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- 26 07 15 JR - Iit Iz Co Spark Jee Adv (2013 p1) Wta 11 Key & Sol'sDocument10 pages26 07 15 JR - Iit Iz Co Spark Jee Adv (2013 p1) Wta 11 Key & Sol'srahulNo ratings yet
- Narayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolDocument12 pagesNarayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolYuva AkhilNo ratings yet
- 07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P2 - Key & Sol'sDocument13 pages07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P2 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- CPT-04 Key Sheet: PhysicsDocument10 pagesCPT-04 Key Sheet: Physicsmanoj singhNo ratings yet
- 13 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 15n Key&sDocument16 pages13 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 15n Key&sReddyNo ratings yet
- 21-04-2024 - SR C-120 - Jee-Adv (2021-P1) - WTA-30 - Key & Sol'sDocument13 pages21-04-2024 - SR C-120 - Jee-Adv (2021-P1) - WTA-30 - Key & Sol'sbsahil2007No ratings yet
- Key&Solutions: MathematicsDocument10 pagesKey&Solutions: MathematicsDharmik Pawan KumarNo ratings yet
- 21 - 12 - 23 - GTM01 - SR - STAR - CO - SCMODELanswer KeyDocument15 pages21 - 12 - 23 - GTM01 - SR - STAR - CO - SCMODELanswer KeyMayank Kashyap100% (1)
- CL Liquid Ring Vacuum Pumps and CompressorsDocument0 pagesCL Liquid Ring Vacuum Pumps and CompressorsCarlos TomeyNo ratings yet
- 2 Comparative Analysis of Moisture RemovingDocument7 pages2 Comparative Analysis of Moisture Removing15472No ratings yet
- Shankar Quantum Mechanics SolutionDocument327 pagesShankar Quantum Mechanics Solutionvinay PALNo ratings yet
- Compressive Properties of Rigid Plastics: Standard Test Method ForDocument7 pagesCompressive Properties of Rigid Plastics: Standard Test Method ForAsep Aby SaputraNo ratings yet
- T800 - Industrial Electronics N6 QP April 2019Document10 pagesT800 - Industrial Electronics N6 QP April 2019Kelsey BothaNo ratings yet
- MCQ On Safety ManagementDocument5 pagesMCQ On Safety ManagementKishor Patil72% (32)
- G. Boothroyd, Fundamentals of Metal Machining and Machine Tools.Document89 pagesG. Boothroyd, Fundamentals of Metal Machining and Machine Tools.n100% (1)
- A Laboratory-Centered Approach To Introducing Engineering Students To Electric Circuit and Electric Systems ConceptsDocument6 pagesA Laboratory-Centered Approach To Introducing Engineering Students To Electric Circuit and Electric Systems ConceptsVia Marie MesaNo ratings yet
- Modulus of Subgrade Reaction That Varies With Magnitude of Displacement of Cohesionless SoilDocument8 pagesModulus of Subgrade Reaction That Varies With Magnitude of Displacement of Cohesionless SoilSubinay Saha RoyNo ratings yet
- 2537 VD4G-50 Vacuum Circuit-Breaker GBDocument4 pages2537 VD4G-50 Vacuum Circuit-Breaker GBburvanov0% (1)
- (1991) Hornik (Neural Netw.)Document7 pages(1991) Hornik (Neural Netw.)MaxNo ratings yet
- Ucmp Unit-5Document77 pagesUcmp Unit-5Rashida BegumNo ratings yet
- Intoval T62Document1 pageIntoval T62Calvin Cookson100% (1)
- Tribon M2 - SurfaceDocument68 pagesTribon M2 - SurfaceLary Lysu100% (1)
- John Crane MaterialsDocument46 pagesJohn Crane MaterialsLuis YañezNo ratings yet
- Development of The Atomic TheoryDocument10 pagesDevelopment of The Atomic TheorysleepyanyaNo ratings yet
- Portamess911pH 911XpH InstructionManualDocument52 pagesPortamess911pH 911XpH InstructionManualEvandro De Souza RamosNo ratings yet
- Test To PassDocument7 pagesTest To Passayushbhardwaj181820No ratings yet
- Heat and Mass Transfer RajputDocument919 pagesHeat and Mass Transfer RajputNS MusicalNo ratings yet
- TEPZZ 8576Z A - T: European Patent ApplicationDocument11 pagesTEPZZ 8576Z A - T: European Patent ApplicationbrunosamaeianNo ratings yet
- Sec.6 - Class C Heat ExchangerDocument33 pagesSec.6 - Class C Heat ExchangerAgung Dewandaru MahatmantoNo ratings yet
- Analysis of Energy Efficient PTL Based Full Adders Using Different Nanometer TechnologiesDocument6 pagesAnalysis of Energy Efficient PTL Based Full Adders Using Different Nanometer TechnologiesDwarakaManeekantaAddagiriNo ratings yet
- Oil Field ManagerDocument3 pagesOil Field ManagerWalter Eloy Ramirez CarranzaNo ratings yet
- Math Cidam - PrecalculusDocument8 pagesMath Cidam - PrecalculusAmy Mendiola100% (1)
- NDT One MarkDocument11 pagesNDT One MarkAnonymous 6SivdzjNo ratings yet
- Lab 2Document13 pagesLab 2ahmedNo ratings yet
- Gis LecDocument6 pagesGis LecNiño Mar CenaNo ratings yet
- Asme PTC 38Document133 pagesAsme PTC 38Anonymous knICax100% (1)
- Development of AerofoilDocument6 pagesDevelopment of Aerofoilvaisakp777No ratings yet