Download as docx, pdf, or txt
You might also like
- Data Structure Question Paper With Answer PDFDocument6 pagesData Structure Question Paper With Answer PDFMohammad Izhar Azad100% (4)
- Meat Inspection in The Abattoir in CameroonDocument122 pagesMeat Inspection in The Abattoir in CameroonKevine Kenmoe MocheNo ratings yet
- Essential Algorithms: A Practical Approach to Computer Algorithms Using Python and C#From EverandEssential Algorithms: A Practical Approach to Computer Algorithms Using Python and C#Rating: 4.5 out of 5 stars4.5/5 (2)
- Data Structure MCQDocument31 pagesData Structure MCQVallari Shah88% (8)
- Data Structures Multiple Choice QuestionsDocument6 pagesData Structures Multiple Choice QuestionsGm Lakshman100% (2)
- ARCHITECT PHILIPPINES Outline Spec For ArkiDocument39 pagesARCHITECT PHILIPPINES Outline Spec For ArkiBenjie LatrizNo ratings yet
- MCQ'S DSTCDocument9 pagesMCQ'S DSTCMonika SethiNo ratings yet
- DS MCQDocument13 pagesDS MCQbhagwatsachin100% (1)
- Ds MCQDocument17 pagesDs MCQKesava MurthyNo ratings yet
- ArraysDocument6 pagesArraysRajesh BeuraNo ratings yet
- Data StructureDocument13 pagesData StructureAizazAzizNo ratings yet
- Data Structures A Algorithms Multiple Choset 3Document6 pagesData Structures A Algorithms Multiple Choset 3syrissco123No ratings yet
- Online DS MCQs Paper-MCS 2nd EveDocument9 pagesOnline DS MCQs Paper-MCS 2nd EveKashif Javad100% (1)
- CSC501QADocument10 pagesCSC501QADev jibreenNo ratings yet
- Hafiz Syed Muhammad HurDocument17 pagesHafiz Syed Muhammad HurHur ZaheerNo ratings yet
- Data Structure Objective QuestionsDocument21 pagesData Structure Objective Questionsasubhash2367% (3)
- C C CC C C CCCCCCCDocument5 pagesC C CC C C CCCCCCCgaurav_great8690No ratings yet
- Data Structure (DS) Solved MCQsDocument6 pagesData Structure (DS) Solved MCQsChinmay InamdarNo ratings yet
- ALGORITHUMDocument28 pagesALGORITHUMmadhuri nimseNo ratings yet
- Data StructuresMCQDocument28 pagesData StructuresMCQMinu Choudhary100% (6)
- Q:1 Answer The Following. 9: 5. The Linear Search Is Not Suitable WhenDocument1 pageQ:1 Answer The Following. 9: 5. The Linear Search Is Not Suitable Whenjay desai100% (1)
- Sample QuestionsDocument17 pagesSample QuestionsragavendharNo ratings yet
- BCA-2Sem Data StructureDocument30 pagesBCA-2Sem Data StructureSHAMBHU JHANo ratings yet
- Name Ag# CourseDocument25 pagesName Ag# CourseM ShahidNo ratings yet
- Data Structures MCQDocument37 pagesData Structures MCQchaudhari ManishNo ratings yet
- DS MCQsDocument11 pagesDS MCQsSwebert Antony D'melloNo ratings yet
- Data Structure MCQDocument16 pagesData Structure MCQMaaz AdhoniNo ratings yet
- Data Structures & Algorithms - Multiple Choice Questions (MCQS) - Objective Set 3Document14 pagesData Structures & Algorithms - Multiple Choice Questions (MCQS) - Objective Set 3Anurag GoelNo ratings yet
- MCQs Data StructuresDocument6 pagesMCQs Data Structuresabebemako302No ratings yet
- Data Structures MCQDocument19 pagesData Structures MCQAshwani Vajpai100% (1)
- Questions 1 Through 25 Are Worth 2 Points Each. Choose One Best Answer For EachDocument5 pagesQuestions 1 Through 25 Are Worth 2 Points Each. Choose One Best Answer For EachThao NguyenNo ratings yet
- UntitledDocument30 pagesUntitledcomfort oforiNo ratings yet
- Question Bank - Data StructuresDocument7 pagesQuestion Bank - Data StructuresRehan PathanNo ratings yet
- Principles of Database DesignDocument4 pagesPrinciples of Database DesignFasna K. SNo ratings yet
- Dsa MCQDocument9 pagesDsa MCQbenaminsan100% (1)
- Question Bank of DSADocument33 pagesQuestion Bank of DSApriya bendreNo ratings yet
- Questions On Data StructureDocument4 pagesQuestions On Data StructureSai SivaNo ratings yet
- Fundamentals of Data Structures - MCQ - IIDocument34 pagesFundamentals of Data Structures - MCQ - IIJeya Perumal100% (1)
- Fundamentals of Data Structures - MCQ - IDocument26 pagesFundamentals of Data Structures - MCQ - IJeya Perumal100% (1)
- Sree Saraswathi Thyagaraja College (Autonomous), PollachiDocument19 pagesSree Saraswathi Thyagaraja College (Autonomous), PollachiElamparithi ManiezhilanNo ratings yet
- DATA STRUCTURE Www-Matterhere-Com NRRDocument5 pagesDATA STRUCTURE Www-Matterhere-Com NRRNavanit KumarNo ratings yet
- DataStructure End Sem Lab Eam EEDocument8 pagesDataStructure End Sem Lab Eam EEDivyanshu Bose50% (2)
- Data StructuresDocument45 pagesData StructuressonalibhagwatkarNo ratings yet
- Sri Ramanjar Engineering College Department of Electronic and Communication Engineering EC 8393 Fundamental of DATA STRUCTURE Model Exam MARKS: 100 TIME: 2hrs Part ADocument7 pagesSri Ramanjar Engineering College Department of Electronic and Communication Engineering EC 8393 Fundamental of DATA STRUCTURE Model Exam MARKS: 100 TIME: 2hrs Part ASuguna PriyaNo ratings yet
- Chapter 3-Linked ListDocument23 pagesChapter 3-Linked ListBhavesh SonawaneNo ratings yet
- Data Structure and Algorithms (Set 1)Document21 pagesData Structure and Algorithms (Set 1)Week KeeNo ratings yet
- Quiz DsaDocument18 pagesQuiz Dsalyminh194No ratings yet
- Data Structure and Algorithm MCQDocument8 pagesData Structure and Algorithm MCQtayyab100% (1)
- Data Structures Algorithms Multiple Choice Questions MCQs PDFDocument16 pagesData Structures Algorithms Multiple Choice Questions MCQs PDFanon_742245151No ratings yet
- Data Structures Algorithms Multiple Choice Questions MCQsDocument16 pagesData Structures Algorithms Multiple Choice Questions MCQssibanandarmsNo ratings yet
- Solved Multiple Choice Questions of DataDocument40 pagesSolved Multiple Choice Questions of Datamini projectNo ratings yet
- Dsa MockDocument8 pagesDsa MockRutik DakNo ratings yet
- Data Structure Exam Sample - 2020Document12 pagesData Structure Exam Sample - 2020Rewina zerouNo ratings yet
- Data Structure Multiple Choice Questions - AdmissionaddaDocument13 pagesData Structure Multiple Choice Questions - AdmissionaddaAshwini Nayani67% (3)
- DS MCQsDocument25 pagesDS MCQsdeepalikayandeNo ratings yet
- DS Combined All UnitsDocument66 pagesDS Combined All Units30. Suraj IngaleNo ratings yet
- Fundamentals of Data Structures - MCQ - III.Document22 pagesFundamentals of Data Structures - MCQ - III.Jeya Perumal100% (1)
- Quiz QuestionsDocument2 pagesQuiz QuestionsHimanshu AggarwalNo ratings yet
- Advanced C Concepts and Programming: First EditionFrom EverandAdvanced C Concepts and Programming: First EditionRating: 3 out of 5 stars3/5 (1)
- The Self-Taught Computer Scientist: The Beginner's Guide to Data Structures & AlgorithmsFrom EverandThe Self-Taught Computer Scientist: The Beginner's Guide to Data Structures & AlgorithmsNo ratings yet
- Blaze Through the GRE 120 Quantitative Exercises and ExplanationsFrom EverandBlaze Through the GRE 120 Quantitative Exercises and ExplanationsNo ratings yet
- Matrix Theory and Applications for Scientists and EngineersFrom EverandMatrix Theory and Applications for Scientists and EngineersNo ratings yet
- Peripheral Blood Smear Pathologist ToolDocument3 pagesPeripheral Blood Smear Pathologist ToolSimon HafeniNo ratings yet
- Backplane Designer's Guide 4Document11 pagesBackplane Designer's Guide 4terryschNo ratings yet
- REPORT Phulkari PDFDocument19 pagesREPORT Phulkari PDFVritti Malhotra100% (2)
- Veselin RmušDocument24 pagesVeselin RmušMato KankarašNo ratings yet
- Download: Mosaic TechniquesDocument2 pagesDownload: Mosaic TechniquesJohnny LaounNo ratings yet
- 1Q Planificación Microcurricular 8thDocument1 page1Q Planificación Microcurricular 8thAbigail Sisalema BastidasNo ratings yet
- Raft FoundationsDocument12 pagesRaft FoundationsJoshua RobinsonNo ratings yet
- Vxflex Data SheetDocument5 pagesVxflex Data SheetJesus SantiagoNo ratings yet
- XI Theories and Schools of Modern LinguisticsDocument62 pagesXI Theories and Schools of Modern LinguisticsDjallelBoulmaizNo ratings yet
- Hq004 Hq006 Oplusm Manual Rev BDocument7 pagesHq004 Hq006 Oplusm Manual Rev BadrianioantomaNo ratings yet
- Case Digests in PropertyDocument95 pagesCase Digests in PropertyRemelyn SeldaNo ratings yet
- Read The Following Instructions Carefully Before Attempting The AssignmentDocument2 pagesRead The Following Instructions Carefully Before Attempting The AssignmentBhargav PerasaniNo ratings yet
- Foreword - 1999 - Simulation of Industrial Processes For Control Engineers PDFDocument1 pageForeword - 1999 - Simulation of Industrial Processes For Control Engineers PDFCésar SandovalNo ratings yet
- Legend of The Galactic Heroes, Vol. 10 Sunset by Yoshiki Tanaka (Tanaka, Yoshiki)Document245 pagesLegend of The Galactic Heroes, Vol. 10 Sunset by Yoshiki Tanaka (Tanaka, Yoshiki)StafarneNo ratings yet
- MGT 534 Organizational Behavior2Document3 pagesMGT 534 Organizational Behavior2Phattyin ZaharahNo ratings yet
- Muhammad Farid Ubaidillah - Youth's EndeavorDocument4 pagesMuhammad Farid Ubaidillah - Youth's EndeavorMuhammad farid ubaidillah UB 2022No ratings yet
- Correlation 1Document9 pagesCorrelation 1Bharat ChaudharyNo ratings yet
- Rabies: Dr. Paul Bartlett, MPH., DVM., PH.DDocument45 pagesRabies: Dr. Paul Bartlett, MPH., DVM., PH.DnfrnufaNo ratings yet
- Build RC Rect SectionDocument3 pagesBuild RC Rect SectionOmar NajmNo ratings yet
- Presentación de Stefanini PDFDocument24 pagesPresentación de Stefanini PDFramontxu06No ratings yet
- SAARC Geophysics Course - KhalidDocument106 pagesSAARC Geophysics Course - KhalidWaqar Ahmed100% (2)
- Assignment 4 Inplant TrainingDocument14 pagesAssignment 4 Inplant TrainingRajas BiliyeNo ratings yet
- Audit ComplianceDocument10 pagesAudit ComplianceAl-Amin SarkarNo ratings yet
- User Manual IvmsDocument223 pagesUser Manual IvmsGerardo AltobelliNo ratings yet
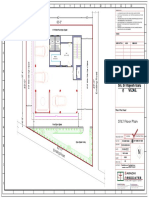
- Final Stilt Floor Plan 16042022Document1 pageFinal Stilt Floor Plan 16042022rajesh lankaNo ratings yet
- 7040 02 Que 20100511Document28 pages7040 02 Que 20100511Mohammad Mohasin SarderNo ratings yet
- Parker Valvula Direcional D3W PDFDocument20 pagesParker Valvula Direcional D3W PDFChagas OliveiraNo ratings yet
- Power Homes vs. SECDocument22 pagesPower Homes vs. SEChaileyraincloudNo ratings yet