Download as pdf or txt
You might also like
- MHB Automotive LIDAR ArtictleDocument14 pagesMHB Automotive LIDAR Artictletuanlh.todayNo ratings yet
- Applsci 09 02341Document14 pagesApplsci 09 02341Raman KanaaNo ratings yet
- 2autonomous CarDocument32 pages2autonomous CarJaya KumarNo ratings yet
- Sensors 20 07283Document21 pagesSensors 20 07283Gopinathrg19 KrishNo ratings yet
- Lidar Sensor Saadulhassan Syed C2Document8 pagesLidar Sensor Saadulhassan Syed C2tuanlh.todayNo ratings yet
- An Overviewon Li DARfor Autonomous Vehicles 2Document7 pagesAn Overviewon Li DARfor Autonomous Vehicles 2Ioana PavelNo ratings yet
- Wang 2021 J. Phys. Conf. Ser. 2093 012032Document7 pagesWang 2021 J. Phys. Conf. Ser. 2093 012032Fareed HusseinNo ratings yet
- Irjet-V6i120 - Driverless CarsDocument7 pagesIrjet-V6i120 - Driverless CarsAfroz Alam Ki VinesNo ratings yet
- Electronics 11 03586Document25 pagesElectronics 11 03586Horacio KejnNo ratings yet
- Sensors 22 06142 With CoverDocument16 pagesSensors 22 06142 With CoverFernando ShadowNo ratings yet
- Panovild: A Challenging Panoramic Vision, Inertial and Lidar Dataset For Simultaneous Localization and MappingDocument21 pagesPanovild: A Challenging Panoramic Vision, Inertial and Lidar Dataset For Simultaneous Localization and Mapping王重睿No ratings yet
- Sensors and Sensor Fusion in Autonomous VehiclesDocument4 pagesSensors and Sensor Fusion in Autonomous VehiclesWIlhelmNo ratings yet
- Sensors 21 01951 v2Document45 pagesSensors 21 01951 v2Soumitra KunduNo ratings yet
- LIDAR Imaging SystemDocument2 pagesLIDAR Imaging SystemWolf AshNo ratings yet
- Weather Effects On Obstacle Detection For Autonomous CarDocument11 pagesWeather Effects On Obstacle Detection For Autonomous Cartuanlh.todayNo ratings yet
- Baron White Paper Radar System SelectionDocument6 pagesBaron White Paper Radar System SelectionGebeleizis MorbiduNo ratings yet
- ACES Journal January 2019 Paper 11Document11 pagesACES Journal January 2019 Paper 11Zeus NegronNo ratings yet
- Illusion and Dazzle: Adversarial Optical Channel Exploits Against Lidars For Automotive ApplicationsDocument21 pagesIllusion and Dazzle: Adversarial Optical Channel Exploits Against Lidars For Automotive Applicationsaneshraj905No ratings yet
- System For 3D Mapping Using Affordable LIDAR: Veličko Krsmanović, Marko Barjaktarović, and Ana Gavrovska, Member, IEEEDocument6 pagesSystem For 3D Mapping Using Affordable LIDAR: Veličko Krsmanović, Marko Barjaktarović, and Ana Gavrovska, Member, IEEEMUSTAPHA BERAMINo ratings yet
- LIM 2021 Art00016 Christian-KrebsDocument5 pagesLIM 2021 Art00016 Christian-Krebsmahmoud khedrNo ratings yet
- A Review of The Impact of Rain On Camera-Based Perception in Automated Driving SystemsDocument18 pagesA Review of The Impact of Rain On Camera-Based Perception in Automated Driving SystemsvishvcyberNo ratings yet
- Thesis LidarDocument7 pagesThesis Lidarbrendawhitejackson100% (2)
- FInal Project OpticsDocument14 pagesFInal Project OpticsTaylor JammiesonNo ratings yet
- LidarDocument8 pagesLidarAravind SomasundaramNo ratings yet
- Sensors 20 03662 v2Document21 pagesSensors 20 03662 v2Palanisamy VNo ratings yet
- Google CarDocument33 pagesGoogle CarElgin MonachanNo ratings yet
- Gesture Recognition Using Mm-Wave Sensor For Human-Car InterfaceDocument5 pagesGesture Recognition Using Mm-Wave Sensor For Human-Car Interface明軒呂No ratings yet
- Sensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarDocument16 pagesSensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarfakeNo ratings yet
- Seminar Report 2013 Autonomous Car: Dept. of ECE, T.K.M Institute of Technology, KollamDocument33 pagesSeminar Report 2013 Autonomous Car: Dept. of ECE, T.K.M Institute of Technology, KollamTAEYOUNG CHOINo ratings yet
- Automatic Lane Identification Using The Roadside Lidar SensorsDocument11 pagesAutomatic Lane Identification Using The Roadside Lidar SensorsGhionNo ratings yet
- Sensor FusionDocument5 pagesSensor FusionShiva AgrawalNo ratings yet
- Irjet V2i3352 PDFDocument4 pagesIrjet V2i3352 PDFPankaj RaibagkarNo ratings yet
- Multi-Traffic Scene Perception Based On Supervised LearningDocument10 pagesMulti-Traffic Scene Perception Based On Supervised LearningChandhu DasariNo ratings yet
- SBIR GovDocument4 pagesSBIR GovgrenzoNo ratings yet
- Deep Learning For Image and Point Cloud Fusion in Autonomous Driving: A ReviewDocument19 pagesDeep Learning For Image and Point Cloud Fusion in Autonomous Driving: A ReviewShrida Prathamesh KalamkarNo ratings yet
- Visual-LiDAR Based 3D Object Detection and Tracking For Embedded SystemsDocument14 pagesVisual-LiDAR Based 3D Object Detection and Tracking For Embedded Systems20bec054PRIYANSHU GUPTANo ratings yet
- Islam2022 Chapter AutonomousDrivingVehicleSystemDocument15 pagesIslam2022 Chapter AutonomousDrivingVehicleSystemsibille.bayon.de.noyerNo ratings yet
- Principles of Modern Radar - Advanced Techniques (gnv64) PDFDocument875 pagesPrinciples of Modern Radar - Advanced Techniques (gnv64) PDFryto201092% (13)
- .Road Safety Under Low Visibility Using Speed Detector Technique - Study ProjectDocument4 pages.Road Safety Under Low Visibility Using Speed Detector Technique - Study Projectdarshan jNo ratings yet
- Ece7 - Radar Antenna CommunicationDocument9 pagesEce7 - Radar Antenna CommunicationDinesh KumarNo ratings yet
- IET Radar Sonar Navi - 2023 - Kannanthara - Whole System Radar Modelling Simulation and ValidationDocument11 pagesIET Radar Sonar Navi - 2023 - Kannanthara - Whole System Radar Modelling Simulation and ValidationRafik Et-TrabelsiNo ratings yet
- Idt 15 Idt200106Document15 pagesIdt 15 Idt200106ImaneNo ratings yet
- Remotesensing 13 02365Document21 pagesRemotesensing 13 02365Ra đa Pha ĐinNo ratings yet
- A New Pre Crash System For Side Impact ProtectionDocument15 pagesA New Pre Crash System For Side Impact ProtectionSachin SilmanaNo ratings yet
- 3D Object Detection in Foggy Weather ConditionsDocument16 pages3D Object Detection in Foggy Weather ConditionsMai MinhNo ratings yet
- Google Driverless Car: Department of Electronics and Communication PDA College of Engineering, KalaburagiDocument32 pagesGoogle Driverless Car: Department of Electronics and Communication PDA College of Engineering, Kalaburagivishal agnalNo ratings yet
- Lidar-Histogram For Fast Road and Obstacle DetectionDocument6 pagesLidar-Histogram For Fast Road and Obstacle Detection花样吃鸡刘水水No ratings yet
- Obstacle Detection and Collision Avoidance For A UAV With Complementary Low-Cost SensorsDocument11 pagesObstacle Detection and Collision Avoidance For A UAV With Complementary Low-Cost SensorsPallavi BhartiNo ratings yet
- A Technical Seminar Report ON: Mention The Topic HereDocument27 pagesA Technical Seminar Report ON: Mention The Topic Hereranjith Kumar boorlaNo ratings yet
- PPR PlateDocument2 pagesPPR PlateM Yasir AnjumNo ratings yet
- 07 Ryan1Document13 pages07 Ryan1septianbagaskara990No ratings yet
- LIDAR TechnologyDocument9 pagesLIDAR TechnologyIJRASETPublicationsNo ratings yet
- An Overview of The Last Progress and Core Challenge of Autonomous VehiclesDocument7 pagesAn Overview of The Last Progress and Core Challenge of Autonomous Vehicleszart123No ratings yet
- Deep Learning-Based Drone Classification Using RadDocument10 pagesDeep Learning-Based Drone Classification Using RadYvon WongNo ratings yet
- A Globally Relocatable High-Resolution WRF Realtime Forecast System For Renewable EnergyDocument8 pagesA Globally Relocatable High-Resolution WRF Realtime Forecast System For Renewable EnergyBìnhNo ratings yet
- Remotesensing 13 02973 v3Document28 pagesRemotesensing 13 02973 v3kodish91No ratings yet
- Fooling LiDAR Perception Via Adversarial Trajectory PerturbationDocument10 pagesFooling LiDAR Perception Via Adversarial Trajectory PerturbationTv BraviaNo ratings yet
- Lidar Technology (Seminar-1)Document17 pagesLidar Technology (Seminar-1)Trupti ParidaNo ratings yet
- F DLRforecasting PreprintDocument31 pagesF DLRforecasting Preprintmalekpour_ahmadNo ratings yet
- BroadGate BG-64 IOMM A02 V13 enDocument184 pagesBroadGate BG-64 IOMM A02 V13 enNetaxion CelularNo ratings yet
- Pe Notes PDFDocument197 pagesPe Notes PDFKartikNo ratings yet
- WX900 Installation Manual ReginaldoDocument58 pagesWX900 Installation Manual ReginaldoDaniel Lobato BernardesNo ratings yet
- IR Jammer IR Jammer Assembly Instructions and Assembly Instructions and User Guide User GuideDocument24 pagesIR Jammer IR Jammer Assembly Instructions and Assembly Instructions and User Guide User GuideEl GrandeNo ratings yet
- En FC2301Document3 pagesEn FC2301محمد الأمير الحازميNo ratings yet
- User'S Manual of MCP61P Platform Processor Chipset Series Quad Core AMD ProcessorDocument21 pagesUser'S Manual of MCP61P Platform Processor Chipset Series Quad Core AMD Processormario vasquezNo ratings yet
- IEC 60062 IEC 60063 Preferred Number: International Electrotechnical VocabularyDocument6 pagesIEC 60062 IEC 60063 Preferred Number: International Electrotechnical VocabularyENG.Tahir ThamerNo ratings yet
- Joystick Port Interface ProjectsDocument25 pagesJoystick Port Interface Projectsandrei_scNo ratings yet
- Registers, RAM and Cache MemoryDocument3 pagesRegisters, RAM and Cache MemoryGruNo ratings yet
- N163S AC/DC Power Supply: Dimensions and Drilling PlanDocument2 pagesN163S AC/DC Power Supply: Dimensions and Drilling PlanVariya DharmeshNo ratings yet
- CMA Analysis of Compact Broadband Planar AntennaDocument25 pagesCMA Analysis of Compact Broadband Planar AntennaomarNo ratings yet
- Datasheet Sensor Light Dependent ResistorDocument2 pagesDatasheet Sensor Light Dependent ResistorWendo Bijaksono67% (3)
- Config de Router Cisco 2600Document3 pagesConfig de Router Cisco 2600Djgio MixNo ratings yet
- Circuit SectionDocument59 pagesCircuit SectionsrpadronNo ratings yet
- Z8H - ZGH - Z8HA - ZGHA CML-H +N18P-G61/G62/N19P-Q1 Block Diagram: Intel Comet Lake HDocument77 pagesZ8H - ZGH - Z8HA - ZGHA CML-H +N18P-G61/G62/N19P-Q1 Block Diagram: Intel Comet Lake HAhmadNo ratings yet
- TEMS Layer3 Messages AnalysisDocument49 pagesTEMS Layer3 Messages AnalysisMunther_NawfalNo ratings yet
- Review Cmos - SimDocument87 pagesReview Cmos - SimKhang Truong NguyenNo ratings yet
- MAXITAXIDocument3 pagesMAXITAXIsike1977No ratings yet
- 2019 PRO1SeriesDocument2 pages2019 PRO1SeriesMarcelo Abdon Alborta AntezanaNo ratings yet
- Agnes Martin - Lugand - Imi Pare Rau Sunt AsteptataDocument24 pagesAgnes Martin - Lugand - Imi Pare Rau Sunt AsteptataElena Mitrica25% (4)
- Buck ConverterDocument2 pagesBuck ConverterBhadreshkumar SharmaNo ratings yet
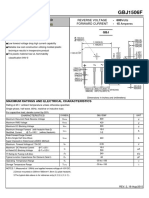
- GBJ1Document2 pagesGBJ1Ariel VicuñaNo ratings yet
- Poor Mans Hearing AidDocument1 pagePoor Mans Hearing Aidvinay reddyNo ratings yet
- TBoxMS - Technical - Specification - PLC TBOX MS-CPU16EDocument8 pagesTBoxMS - Technical - Specification - PLC TBOX MS-CPU16EVictor Abraham Lim Su KangNo ratings yet
- PadwgDocument183 pagesPadwgal nakheel electronicsNo ratings yet
- Chapter 2 CNFDocument9 pagesChapter 2 CNFWilfried MonkamNo ratings yet
- The Loftin-White AmplifierDocument3 pagesThe Loftin-White AmplifierRubengimenezNo ratings yet
- AcdDocument3 pagesAcdbansalrNo ratings yet
- List of Books Published by Matrix EducareDocument5 pagesList of Books Published by Matrix Educarekuntal.kgec.cse323950% (2)
- Fyreye Mkii Addressable Smoke Detectors: DescriptionDocument1 pageFyreye Mkii Addressable Smoke Detectors: Descriptionاحمد المقرميNo ratings yet