
1 s2.0 S0307904X21005102 Main
1 s2.0 S0307904X21005102 Main
You might also like
- Advanced 3 - Workbook - Updated 2017Document116 pagesAdvanced 3 - Workbook - Updated 2017Techbort Technort100% (3)
- Challenges Faced by Entrepreneurs of Sari-Sari Stores in Kabankalan CityDocument40 pagesChallenges Faced by Entrepreneurs of Sari-Sari Stores in Kabankalan CityAyeng 1502100% (2)
- Aero Foil Lift and Drag Project Final ReportDocument67 pagesAero Foil Lift and Drag Project Final Reportpri0322100% (1)
- Technical Guide On Wood& Biomass Pellets ProductionDocument20 pagesTechnical Guide On Wood& Biomass Pellets ProductionLeal Cindy100% (1)
- Aerospace Science and Technology: Khanh Nguyen, Loan Thi Kim Au, Hoang-Vu Phan, Soo Hyung Park, Hoon Cheol ParkDocument13 pagesAerospace Science and Technology: Khanh Nguyen, Loan Thi Kim Au, Hoang-Vu Phan, Soo Hyung Park, Hoon Cheol ParkHosein PahlavanNo ratings yet
- SeligMcGranahan 2004 JSEE SixLRNAirfoilsDocument16 pagesSeligMcGranahan 2004 JSEE SixLRNAirfoilsKhemissat BoualemNo ratings yet
- Selig 2004Document16 pagesSelig 2004Şevki SağlamNo ratings yet
- Executiveeditor,+jea 2021 02 001-1Document8 pagesExecutiveeditor,+jea 2021 02 001-1ツNunoNo ratings yet
- Iaetsd-Jaras-Stall Characteristics of Single and Multi-ElementDocument6 pagesIaetsd-Jaras-Stall Characteristics of Single and Multi-ElementiaetsdiaetsdNo ratings yet
- Design Optimization of Ceiling Fan Blades With Nonlinear Sweep ProfileDocument10 pagesDesign Optimization of Ceiling Fan Blades With Nonlinear Sweep ProfileFloyd PriceNo ratings yet
- 8838-Article Text-16063-1-10-20181031Document11 pages8838-Article Text-16063-1-10-20181031varun karthikeyanNo ratings yet
- Investigation of Variable Spanwise Waviness Wavelength Effect On Wing Aerodynamic PerformanceDocument13 pagesInvestigation of Variable Spanwise Waviness Wavelength Effect On Wing Aerodynamic Performanceelson.study.workNo ratings yet
- ICCFD9 2016 185 - v05Document12 pagesICCFD9 2016 185 - v05Hakan DemirNo ratings yet
- Naca 4412Document3 pagesNaca 4412Selva KumarNo ratings yet
- Divergence of FSWDocument50 pagesDivergence of FSWkingroy2377100% (1)
- Abdullah 2017 J. Phys. Conf. Ser. 914 012005Document8 pagesAbdullah 2017 J. Phys. Conf. Ser. 914 012005Mostafa TawfeekNo ratings yet
- Análisis de Generación de Entropía de Geometrías de Perfil Aerodinámico de Turbinas Eólicas Marinas S825, S822 y SD7062Document16 pagesAnálisis de Generación de Entropía de Geometrías de Perfil Aerodinámico de Turbinas Eólicas Marinas S825, S822 y SD7062Juan ApzNo ratings yet
- Effects of Taper Ratio On Aircraft Wing Aerodynamic ParametersDocument6 pagesEffects of Taper Ratio On Aircraft Wing Aerodynamic ParametersMATEUS RODOVALHO EDINGERNo ratings yet
- 2 D Flexible WingDocument14 pages2 D Flexible WingMert BağrıyanıkNo ratings yet
- 2020 Hybrid Pressure Integration and Buffeting Analysis For Multi-Row Wind Loading in An Array of Single-Axis TrackersDocument16 pages2020 Hybrid Pressure Integration and Buffeting Analysis For Multi-Row Wind Loading in An Array of Single-Axis TrackersYanfei ZhuNo ratings yet
- P46-Investigations On The Shape Optimization of Naca0012Document13 pagesP46-Investigations On The Shape Optimization of Naca0012Mohi AnsarNo ratings yet
- Ijaiem 2018 06 02 2Document8 pagesIjaiem 2018 06 02 2International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Jten 2023 9 5.20539Document12 pagesJten 2023 9 5.20539quocdinh leNo ratings yet
- Rama Rao 2021 IOP Conf. Ser. Mater. Sci. Eng. 1168 012011Document12 pagesRama Rao 2021 IOP Conf. Ser. Mater. Sci. Eng. 1168 012011Şevki SağlamNo ratings yet
- Narsipur Pomeroy Selig Multielement-Airfoil-CFD AIAA Paper 2012-2781Document18 pagesNarsipur Pomeroy Selig Multielement-Airfoil-CFD AIAA Paper 2012-2781MD Moiedul Islam MoonNo ratings yet
- NarsipurPomeroySelig 2012Document18 pagesNarsipurPomeroySelig 2012idora27No ratings yet
- Comparison - of - The - Winglet - Aerodynamic - Performance in Unmanned Aerial Vehicle at Low Reynolds NumberDocument11 pagesComparison - of - The - Winglet - Aerodynamic - Performance in Unmanned Aerial Vehicle at Low Reynolds Numberfelip987No ratings yet
- Experimental Investigation of Flow Separation Control Over Airfoil by Upper Surface Flap With A GapDocument11 pagesExperimental Investigation of Flow Separation Control Over Airfoil by Upper Surface Flap With A Gapstud016295No ratings yet
- A40-Driss Et Al. - SE - 2014Document8 pagesA40-Driss Et Al. - SE - 2014A-djouad MeriemNo ratings yet
- Aerothermodynamic Optimization of AerospDocument7 pagesAerothermodynamic Optimization of Aerospanon_948683948No ratings yet
- J Matpr 2021 02 127Document6 pagesJ Matpr 2021 02 127Anh NgoNo ratings yet
- MasterThesisEmanuelaGenuaDocument33 pagesMasterThesisEmanuelaGenuaarash501No ratings yet
- Aerothermodynamics of Generic Reentry Vehicle With A Series of AerospikesDocument9 pagesAerothermodynamics of Generic Reentry Vehicle With A Series of AerospikesKaleeswaran EinsteinNo ratings yet
- An Investigation of Flow Fields Over Multi-Element AerofoilsDocument12 pagesAn Investigation of Flow Fields Over Multi-Element AerofoilsJonathanNo ratings yet
- Aeroelasticity ThesisDocument5 pagesAeroelasticity Thesisb0sus1hyjaf2100% (1)
- IRJET Selection of Turbulence Model ForDocument7 pagesIRJET Selection of Turbulence Model ForŞevki SağlamNo ratings yet
- Experiments On Airfoils at Low Reynolds Numbers: Michael S. SeligDocument10 pagesExperiments On Airfoils at Low Reynolds Numbers: Michael S. SeligPrabhakar GiddaNo ratings yet
- Applsci 10 07258 v2Document21 pagesApplsci 10 07258 v2Dream TeamNo ratings yet
- Experimental Study For Ik Airfoil at Low Speed in A Rectangular Air Cross FlowDocument10 pagesExperimental Study For Ik Airfoil at Low Speed in A Rectangular Air Cross FlowTJPRC PublicationsNo ratings yet
- A Study of Airfoil Flap Deflection Angle Using CFD Simulation TechniquesDocument8 pagesA Study of Airfoil Flap Deflection Angle Using CFD Simulation Techniquesthejaraju_rNo ratings yet
- Aerodynamic Study of Slotted Flap For Naca 24012 Airfoil by Dynamic Mesh Techniques and Visualization FlowDocument11 pagesAerodynamic Study of Slotted Flap For Naca 24012 Airfoil by Dynamic Mesh Techniques and Visualization Flowmike.zhao0824No ratings yet
- 1 s2.0 S2214785321046782 MainDocument10 pages1 s2.0 S2214785321046782 MainMoamen ElsaidNo ratings yet
- GT2014 26779finalDocument13 pagesGT2014 26779finalSanthiNo ratings yet
- A 2d Aerodynamic Study On Morphing of The Naca 241Document10 pagesA 2d Aerodynamic Study On Morphing of The Naca 241henryNo ratings yet
- Trajectory Optimization of A Deflectable Nose Missile - 2017 - Defence TechnologDocument6 pagesTrajectory Optimization of A Deflectable Nose Missile - 2017 - Defence TechnolognanocardosoNo ratings yet
- Computational Aerodynamic Modeling For Flight DynamicsDocument30 pagesComputational Aerodynamic Modeling For Flight Dynamicsuma shankarNo ratings yet
- Numerical Analysis of Effect of Leading-Edge Rotating Cylinder On NACA0021 Symmetric AirfoilDocument7 pagesNumerical Analysis of Effect of Leading-Edge Rotating Cylinder On NACA0021 Symmetric AirfoilArjuna arjunNo ratings yet
- Calculation of Aerodynamic Performance Characteristics of Airplane Wing and Comparing With The Experimental MeasurementDocument6 pagesCalculation of Aerodynamic Performance Characteristics of Airplane Wing and Comparing With The Experimental MeasurementTrader CatNo ratings yet
- Chapter 2-Literature ReviewDocument23 pagesChapter 2-Literature ReviewMuhammad Yaseen KhanNo ratings yet
- EslamDocument11 pagesEslamesport.afsarNo ratings yet
- Literature Review Flow VisualizationDocument3 pagesLiterature Review Flow VisualizationEmmanuel AeroEng ZingapetaNo ratings yet
- Numerical_and_experimental_study_of_the_impact_on_Document15 pagesNumerical_and_experimental_study_of_the_impact_on_madhiNo ratings yet
- CFD Simulation of NACA Airfoilsat Various Angles of AttackDocument12 pagesCFD Simulation of NACA Airfoilsat Various Angles of AttackdaifrahunaNo ratings yet
- Experimental Study On The Effect of Tubercle On Aerodynamic Characteristics of Swept Wings at Low Reynolds NumberDocument10 pagesExperimental Study On The Effect of Tubercle On Aerodynamic Characteristics of Swept Wings at Low Reynolds Numberelson.study.workNo ratings yet
- Aerodynamic Optimization of A Morphing Winglet DesignDocument5 pagesAerodynamic Optimization of A Morphing Winglet DesignPreetham PreethuNo ratings yet
- Materials Today: Proceedings: Arnav Kulshreshtha, Sanjeev Kumar Gupta, Piyush SinghalDocument6 pagesMaterials Today: Proceedings: Arnav Kulshreshtha, Sanjeev Kumar Gupta, Piyush SinghalRomizNo ratings yet
- Enme 547 Group 4 FinalreportDocument7 pagesEnme 547 Group 4 Finalreportapi-313344843No ratings yet
- Punta de Ala 3 UavDocument18 pagesPunta de Ala 3 Uavdiego osorioNo ratings yet
- Numerical Analysis of The Aerodynamic CHDocument8 pagesNumerical Analysis of The Aerodynamic CHAmeem TariqNo ratings yet
- Czyż 2021 J. Phys.: Conf. Ser. 1736 012045Document8 pagesCzyż 2021 J. Phys.: Conf. Ser. 1736 012045king kingNo ratings yet
- Itmconf Cmes-17 07008Document6 pagesItmconf Cmes-17 07008j2002dabdNo ratings yet
- An Investigation Into The Effects of Unsteady Parameters On The Aerodynamics of A Low Reynolds Number Pitching AirfoilDocument15 pagesAn Investigation Into The Effects of Unsteady Parameters On The Aerodynamics of A Low Reynolds Number Pitching AirfoilMANNE SAHITHINo ratings yet
- 1 s2.0 S0029801822004632 MainDocument15 pages1 s2.0 S0029801822004632 MainRohith k rNo ratings yet
- SensorsDocument9 pagesSensorsRohith k rNo ratings yet
- ADV Rageeba COMMISION 2 PadmanbanDocument5 pagesADV Rageeba COMMISION 2 PadmanbanRohith k rNo ratings yet
- TapScanner 08-24-2023-22 17Document6 pagesTapScanner 08-24-2023-22 17Rohith k rNo ratings yet
- Suit Padmanabhan InjunctionDocument44 pagesSuit Padmanabhan InjunctionRohith k rNo ratings yet
- VakalathDocument2 pagesVakalathRohith k rNo ratings yet
- T 222 e 92 ApplicationformDocument1 pageT 222 e 92 ApplicationformRohith k rNo ratings yet
- TapScanner 08-24-2023-22 33Document3 pagesTapScanner 08-24-2023-22 33Rohith k rNo ratings yet
- Witness ListDocument2 pagesWitness ListRohith k rNo ratings yet
- Padma 132Document2 pagesPadma 132Rohith k rNo ratings yet
- Suit Vijaya Sankar - MAILDocument8 pagesSuit Vijaya Sankar - MAILRohith k rNo ratings yet
- Not 0122023 4462023Document3 pagesNot 0122023 4462023Rohith k rNo ratings yet
- Claim Petition SureshDocument4 pagesClaim Petition SureshRohith k rNo ratings yet
- Not 0122023 4282023Document3 pagesNot 0122023 4282023Rohith k rNo ratings yet
- Lesson Plan ON OxytocicsDocument18 pagesLesson Plan ON Oxytocicsrenu100% (2)
- Sample Report Teenager Not SIDocument13 pagesSample Report Teenager Not SIpenny van deer waltNo ratings yet
- Individual Report 23001Document5 pagesIndividual Report 23001Ashley MartinezNo ratings yet
- Tamil Inscriptions in ChinaDocument38 pagesTamil Inscriptions in Chinasubiksha100% (1)
- (Book) Zero EnergyDocument155 pages(Book) Zero EnergycacaNo ratings yet
- Polarized Light MicrosDocument59 pagesPolarized Light MicrosAnonymous Ukn4LwNo ratings yet
- SOC FlyerDocument2 pagesSOC Flyersammer1985No ratings yet
- Chapter 6 Financial AssetsDocument6 pagesChapter 6 Financial AssetsJoyce Mae D. FloresNo ratings yet
- WITH SOLUTIONS Pipe Connection and Three ReservoirDocument46 pagesWITH SOLUTIONS Pipe Connection and Three ReservoirMark PulongbaritNo ratings yet
- Balance of Payment - Chapter1 - IED - AssignmentDocument4 pagesBalance of Payment - Chapter1 - IED - Assignmentavika jainNo ratings yet
- Expt. No: 1111: Determination of Total Hardness of Water by Complexometric Titration (EDTA Method)Document3 pagesExpt. No: 1111: Determination of Total Hardness of Water by Complexometric Titration (EDTA Method)Nael NomanNo ratings yet
- Bar Charts in ResearchDocument5 pagesBar Charts in ResearchPraise NehumambiNo ratings yet
- ArcUri - Organe de Masini OMDocument18 pagesArcUri - Organe de Masini OMCîrstea BökiNo ratings yet
- Varsity KA Class & Exam Routine (Part-01)Document2 pagesVarsity KA Class & Exam Routine (Part-01)Yousuf JamilNo ratings yet
- Thesis Format Iit KanpurDocument7 pagesThesis Format Iit Kanpurvictoriathompsonaustin100% (2)
- S80 2007 Wiring SupplementDocument109 pagesS80 2007 Wiring Supplementjstdoma /No ratings yet
- Agrirobot PDFDocument103 pagesAgrirobot PDFMuhamad Azlan ShahNo ratings yet
- The Problem of Increasing Human Energy - Nikola Tesla PDFDocument27 pagesThe Problem of Increasing Human Energy - Nikola Tesla PDFKarhys100% (2)
- Continental Device India Limited: Silicon Epitaxial TransistorDocument3 pagesContinental Device India Limited: Silicon Epitaxial TransistorRaymundo Moran LopezNo ratings yet
- Looking Back and Looking ForwardDocument6 pagesLooking Back and Looking ForwardJotham SederstromNo ratings yet
- Sarah Tchoukaleff ResumeDocument1 pageSarah Tchoukaleff Resumeapi-261081956No ratings yet
- Iom Biffi Morin Series A B C S en en Us 6089118Document37 pagesIom Biffi Morin Series A B C S en en Us 6089118Anonymous Wu6FDjbNo ratings yet
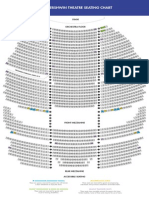
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- AOF - Orcs v2.50Document2 pagesAOF - Orcs v2.50Emilio Domingo RodrigoNo ratings yet
- UFOs Caught in A Web of DeceptionDocument30 pagesUFOs Caught in A Web of DeceptionMarko CankarNo ratings yet
- Calcaneus Fracture: Randy SusantoDocument32 pagesCalcaneus Fracture: Randy SusantoRandy SusantoNo ratings yet
- Department of Applied Physics Applied Physics Question Bank Session - 2012-13Document4 pagesDepartment of Applied Physics Applied Physics Question Bank Session - 2012-13Sajid Ur RehmanNo ratings yet



































































































Download as pdf or txt
You might also like
- Advanced 3 - Workbook - Updated 2017Document116 pagesAdvanced 3 - Workbook - Updated 2017Techbort Technort100% (3)
- Challenges Faced by Entrepreneurs of Sari-Sari Stores in Kabankalan CityDocument40 pagesChallenges Faced by Entrepreneurs of Sari-Sari Stores in Kabankalan CityAyeng 1502100% (2)
- Aero Foil Lift and Drag Project Final ReportDocument67 pagesAero Foil Lift and Drag Project Final Reportpri0322100% (1)
- Technical Guide On Wood& Biomass Pellets ProductionDocument20 pagesTechnical Guide On Wood& Biomass Pellets ProductionLeal Cindy100% (1)
- Aerospace Science and Technology: Khanh Nguyen, Loan Thi Kim Au, Hoang-Vu Phan, Soo Hyung Park, Hoon Cheol ParkDocument13 pagesAerospace Science and Technology: Khanh Nguyen, Loan Thi Kim Au, Hoang-Vu Phan, Soo Hyung Park, Hoon Cheol ParkHosein PahlavanNo ratings yet
- SeligMcGranahan 2004 JSEE SixLRNAirfoilsDocument16 pagesSeligMcGranahan 2004 JSEE SixLRNAirfoilsKhemissat BoualemNo ratings yet
- Selig 2004Document16 pagesSelig 2004Şevki SağlamNo ratings yet
- Executiveeditor,+jea 2021 02 001-1Document8 pagesExecutiveeditor,+jea 2021 02 001-1ツNunoNo ratings yet
- Iaetsd-Jaras-Stall Characteristics of Single and Multi-ElementDocument6 pagesIaetsd-Jaras-Stall Characteristics of Single and Multi-ElementiaetsdiaetsdNo ratings yet
- Design Optimization of Ceiling Fan Blades With Nonlinear Sweep ProfileDocument10 pagesDesign Optimization of Ceiling Fan Blades With Nonlinear Sweep ProfileFloyd PriceNo ratings yet
- 8838-Article Text-16063-1-10-20181031Document11 pages8838-Article Text-16063-1-10-20181031varun karthikeyanNo ratings yet
- Investigation of Variable Spanwise Waviness Wavelength Effect On Wing Aerodynamic PerformanceDocument13 pagesInvestigation of Variable Spanwise Waviness Wavelength Effect On Wing Aerodynamic Performanceelson.study.workNo ratings yet
- ICCFD9 2016 185 - v05Document12 pagesICCFD9 2016 185 - v05Hakan DemirNo ratings yet
- Naca 4412Document3 pagesNaca 4412Selva KumarNo ratings yet
- Divergence of FSWDocument50 pagesDivergence of FSWkingroy2377100% (1)
- Abdullah 2017 J. Phys. Conf. Ser. 914 012005Document8 pagesAbdullah 2017 J. Phys. Conf. Ser. 914 012005Mostafa TawfeekNo ratings yet
- Análisis de Generación de Entropía de Geometrías de Perfil Aerodinámico de Turbinas Eólicas Marinas S825, S822 y SD7062Document16 pagesAnálisis de Generación de Entropía de Geometrías de Perfil Aerodinámico de Turbinas Eólicas Marinas S825, S822 y SD7062Juan ApzNo ratings yet
- Effects of Taper Ratio On Aircraft Wing Aerodynamic ParametersDocument6 pagesEffects of Taper Ratio On Aircraft Wing Aerodynamic ParametersMATEUS RODOVALHO EDINGERNo ratings yet
- 2 D Flexible WingDocument14 pages2 D Flexible WingMert BağrıyanıkNo ratings yet
- 2020 Hybrid Pressure Integration and Buffeting Analysis For Multi-Row Wind Loading in An Array of Single-Axis TrackersDocument16 pages2020 Hybrid Pressure Integration and Buffeting Analysis For Multi-Row Wind Loading in An Array of Single-Axis TrackersYanfei ZhuNo ratings yet
- P46-Investigations On The Shape Optimization of Naca0012Document13 pagesP46-Investigations On The Shape Optimization of Naca0012Mohi AnsarNo ratings yet
- Ijaiem 2018 06 02 2Document8 pagesIjaiem 2018 06 02 2International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Jten 2023 9 5.20539Document12 pagesJten 2023 9 5.20539quocdinh leNo ratings yet
- Rama Rao 2021 IOP Conf. Ser. Mater. Sci. Eng. 1168 012011Document12 pagesRama Rao 2021 IOP Conf. Ser. Mater. Sci. Eng. 1168 012011Şevki SağlamNo ratings yet
- Narsipur Pomeroy Selig Multielement-Airfoil-CFD AIAA Paper 2012-2781Document18 pagesNarsipur Pomeroy Selig Multielement-Airfoil-CFD AIAA Paper 2012-2781MD Moiedul Islam MoonNo ratings yet
- NarsipurPomeroySelig 2012Document18 pagesNarsipurPomeroySelig 2012idora27No ratings yet
- Comparison - of - The - Winglet - Aerodynamic - Performance in Unmanned Aerial Vehicle at Low Reynolds NumberDocument11 pagesComparison - of - The - Winglet - Aerodynamic - Performance in Unmanned Aerial Vehicle at Low Reynolds Numberfelip987No ratings yet
- Experimental Investigation of Flow Separation Control Over Airfoil by Upper Surface Flap With A GapDocument11 pagesExperimental Investigation of Flow Separation Control Over Airfoil by Upper Surface Flap With A Gapstud016295No ratings yet
- A40-Driss Et Al. - SE - 2014Document8 pagesA40-Driss Et Al. - SE - 2014A-djouad MeriemNo ratings yet
- Aerothermodynamic Optimization of AerospDocument7 pagesAerothermodynamic Optimization of Aerospanon_948683948No ratings yet
- J Matpr 2021 02 127Document6 pagesJ Matpr 2021 02 127Anh NgoNo ratings yet
- MasterThesisEmanuelaGenuaDocument33 pagesMasterThesisEmanuelaGenuaarash501No ratings yet
- Aerothermodynamics of Generic Reentry Vehicle With A Series of AerospikesDocument9 pagesAerothermodynamics of Generic Reentry Vehicle With A Series of AerospikesKaleeswaran EinsteinNo ratings yet
- An Investigation of Flow Fields Over Multi-Element AerofoilsDocument12 pagesAn Investigation of Flow Fields Over Multi-Element AerofoilsJonathanNo ratings yet
- Aeroelasticity ThesisDocument5 pagesAeroelasticity Thesisb0sus1hyjaf2100% (1)
- IRJET Selection of Turbulence Model ForDocument7 pagesIRJET Selection of Turbulence Model ForŞevki SağlamNo ratings yet
- Experiments On Airfoils at Low Reynolds Numbers: Michael S. SeligDocument10 pagesExperiments On Airfoils at Low Reynolds Numbers: Michael S. SeligPrabhakar GiddaNo ratings yet
- Applsci 10 07258 v2Document21 pagesApplsci 10 07258 v2Dream TeamNo ratings yet
- Experimental Study For Ik Airfoil at Low Speed in A Rectangular Air Cross FlowDocument10 pagesExperimental Study For Ik Airfoil at Low Speed in A Rectangular Air Cross FlowTJPRC PublicationsNo ratings yet
- A Study of Airfoil Flap Deflection Angle Using CFD Simulation TechniquesDocument8 pagesA Study of Airfoil Flap Deflection Angle Using CFD Simulation Techniquesthejaraju_rNo ratings yet
- Aerodynamic Study of Slotted Flap For Naca 24012 Airfoil by Dynamic Mesh Techniques and Visualization FlowDocument11 pagesAerodynamic Study of Slotted Flap For Naca 24012 Airfoil by Dynamic Mesh Techniques and Visualization Flowmike.zhao0824No ratings yet
- 1 s2.0 S2214785321046782 MainDocument10 pages1 s2.0 S2214785321046782 MainMoamen ElsaidNo ratings yet
- GT2014 26779finalDocument13 pagesGT2014 26779finalSanthiNo ratings yet
- A 2d Aerodynamic Study On Morphing of The Naca 241Document10 pagesA 2d Aerodynamic Study On Morphing of The Naca 241henryNo ratings yet
- Trajectory Optimization of A Deflectable Nose Missile - 2017 - Defence TechnologDocument6 pagesTrajectory Optimization of A Deflectable Nose Missile - 2017 - Defence TechnolognanocardosoNo ratings yet
- Computational Aerodynamic Modeling For Flight DynamicsDocument30 pagesComputational Aerodynamic Modeling For Flight Dynamicsuma shankarNo ratings yet
- Numerical Analysis of Effect of Leading-Edge Rotating Cylinder On NACA0021 Symmetric AirfoilDocument7 pagesNumerical Analysis of Effect of Leading-Edge Rotating Cylinder On NACA0021 Symmetric AirfoilArjuna arjunNo ratings yet
- Calculation of Aerodynamic Performance Characteristics of Airplane Wing and Comparing With The Experimental MeasurementDocument6 pagesCalculation of Aerodynamic Performance Characteristics of Airplane Wing and Comparing With The Experimental MeasurementTrader CatNo ratings yet
- Chapter 2-Literature ReviewDocument23 pagesChapter 2-Literature ReviewMuhammad Yaseen KhanNo ratings yet
- EslamDocument11 pagesEslamesport.afsarNo ratings yet
- Literature Review Flow VisualizationDocument3 pagesLiterature Review Flow VisualizationEmmanuel AeroEng ZingapetaNo ratings yet
- Numerical_and_experimental_study_of_the_impact_on_Document15 pagesNumerical_and_experimental_study_of_the_impact_on_madhiNo ratings yet
- CFD Simulation of NACA Airfoilsat Various Angles of AttackDocument12 pagesCFD Simulation of NACA Airfoilsat Various Angles of AttackdaifrahunaNo ratings yet
- Experimental Study On The Effect of Tubercle On Aerodynamic Characteristics of Swept Wings at Low Reynolds NumberDocument10 pagesExperimental Study On The Effect of Tubercle On Aerodynamic Characteristics of Swept Wings at Low Reynolds Numberelson.study.workNo ratings yet
- Aerodynamic Optimization of A Morphing Winglet DesignDocument5 pagesAerodynamic Optimization of A Morphing Winglet DesignPreetham PreethuNo ratings yet
- Materials Today: Proceedings: Arnav Kulshreshtha, Sanjeev Kumar Gupta, Piyush SinghalDocument6 pagesMaterials Today: Proceedings: Arnav Kulshreshtha, Sanjeev Kumar Gupta, Piyush SinghalRomizNo ratings yet
- Enme 547 Group 4 FinalreportDocument7 pagesEnme 547 Group 4 Finalreportapi-313344843No ratings yet
- Punta de Ala 3 UavDocument18 pagesPunta de Ala 3 Uavdiego osorioNo ratings yet
- Numerical Analysis of The Aerodynamic CHDocument8 pagesNumerical Analysis of The Aerodynamic CHAmeem TariqNo ratings yet
- Czyż 2021 J. Phys.: Conf. Ser. 1736 012045Document8 pagesCzyż 2021 J. Phys.: Conf. Ser. 1736 012045king kingNo ratings yet
- Itmconf Cmes-17 07008Document6 pagesItmconf Cmes-17 07008j2002dabdNo ratings yet
- An Investigation Into The Effects of Unsteady Parameters On The Aerodynamics of A Low Reynolds Number Pitching AirfoilDocument15 pagesAn Investigation Into The Effects of Unsteady Parameters On The Aerodynamics of A Low Reynolds Number Pitching AirfoilMANNE SAHITHINo ratings yet
- 1 s2.0 S0029801822004632 MainDocument15 pages1 s2.0 S0029801822004632 MainRohith k rNo ratings yet
- SensorsDocument9 pagesSensorsRohith k rNo ratings yet
- ADV Rageeba COMMISION 2 PadmanbanDocument5 pagesADV Rageeba COMMISION 2 PadmanbanRohith k rNo ratings yet
- TapScanner 08-24-2023-22 17Document6 pagesTapScanner 08-24-2023-22 17Rohith k rNo ratings yet
- Suit Padmanabhan InjunctionDocument44 pagesSuit Padmanabhan InjunctionRohith k rNo ratings yet
- VakalathDocument2 pagesVakalathRohith k rNo ratings yet
- T 222 e 92 ApplicationformDocument1 pageT 222 e 92 ApplicationformRohith k rNo ratings yet
- TapScanner 08-24-2023-22 33Document3 pagesTapScanner 08-24-2023-22 33Rohith k rNo ratings yet
- Witness ListDocument2 pagesWitness ListRohith k rNo ratings yet
- Padma 132Document2 pagesPadma 132Rohith k rNo ratings yet
- Suit Vijaya Sankar - MAILDocument8 pagesSuit Vijaya Sankar - MAILRohith k rNo ratings yet
- Not 0122023 4462023Document3 pagesNot 0122023 4462023Rohith k rNo ratings yet
- Claim Petition SureshDocument4 pagesClaim Petition SureshRohith k rNo ratings yet
- Not 0122023 4282023Document3 pagesNot 0122023 4282023Rohith k rNo ratings yet
- Lesson Plan ON OxytocicsDocument18 pagesLesson Plan ON Oxytocicsrenu100% (2)
- Sample Report Teenager Not SIDocument13 pagesSample Report Teenager Not SIpenny van deer waltNo ratings yet
- Individual Report 23001Document5 pagesIndividual Report 23001Ashley MartinezNo ratings yet
- Tamil Inscriptions in ChinaDocument38 pagesTamil Inscriptions in Chinasubiksha100% (1)
- (Book) Zero EnergyDocument155 pages(Book) Zero EnergycacaNo ratings yet
- Polarized Light MicrosDocument59 pagesPolarized Light MicrosAnonymous Ukn4LwNo ratings yet
- SOC FlyerDocument2 pagesSOC Flyersammer1985No ratings yet
- Chapter 6 Financial AssetsDocument6 pagesChapter 6 Financial AssetsJoyce Mae D. FloresNo ratings yet
- WITH SOLUTIONS Pipe Connection and Three ReservoirDocument46 pagesWITH SOLUTIONS Pipe Connection and Three ReservoirMark PulongbaritNo ratings yet
- Balance of Payment - Chapter1 - IED - AssignmentDocument4 pagesBalance of Payment - Chapter1 - IED - Assignmentavika jainNo ratings yet
- Expt. No: 1111: Determination of Total Hardness of Water by Complexometric Titration (EDTA Method)Document3 pagesExpt. No: 1111: Determination of Total Hardness of Water by Complexometric Titration (EDTA Method)Nael NomanNo ratings yet
- Bar Charts in ResearchDocument5 pagesBar Charts in ResearchPraise NehumambiNo ratings yet
- ArcUri - Organe de Masini OMDocument18 pagesArcUri - Organe de Masini OMCîrstea BökiNo ratings yet
- Varsity KA Class & Exam Routine (Part-01)Document2 pagesVarsity KA Class & Exam Routine (Part-01)Yousuf JamilNo ratings yet
- Thesis Format Iit KanpurDocument7 pagesThesis Format Iit Kanpurvictoriathompsonaustin100% (2)
- S80 2007 Wiring SupplementDocument109 pagesS80 2007 Wiring Supplementjstdoma /No ratings yet
- Agrirobot PDFDocument103 pagesAgrirobot PDFMuhamad Azlan ShahNo ratings yet
- The Problem of Increasing Human Energy - Nikola Tesla PDFDocument27 pagesThe Problem of Increasing Human Energy - Nikola Tesla PDFKarhys100% (2)
- Continental Device India Limited: Silicon Epitaxial TransistorDocument3 pagesContinental Device India Limited: Silicon Epitaxial TransistorRaymundo Moran LopezNo ratings yet
- Looking Back and Looking ForwardDocument6 pagesLooking Back and Looking ForwardJotham SederstromNo ratings yet
- Sarah Tchoukaleff ResumeDocument1 pageSarah Tchoukaleff Resumeapi-261081956No ratings yet
- Iom Biffi Morin Series A B C S en en Us 6089118Document37 pagesIom Biffi Morin Series A B C S en en Us 6089118Anonymous Wu6FDjbNo ratings yet
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- AOF - Orcs v2.50Document2 pagesAOF - Orcs v2.50Emilio Domingo RodrigoNo ratings yet
- UFOs Caught in A Web of DeceptionDocument30 pagesUFOs Caught in A Web of DeceptionMarko CankarNo ratings yet
- Calcaneus Fracture: Randy SusantoDocument32 pagesCalcaneus Fracture: Randy SusantoRandy SusantoNo ratings yet
- Department of Applied Physics Applied Physics Question Bank Session - 2012-13Document4 pagesDepartment of Applied Physics Applied Physics Question Bank Session - 2012-13Sajid Ur RehmanNo ratings yet