Download as pdf or txt
You might also like
- Frequency Domain Bandpass Filtering For Image ProcessingDocument10 pagesFrequency Domain Bandpass Filtering For Image ProcessingLeonardo O Iheme100% (16)
- B&O BeoLab 1 Repair ManualDocument26 pagesB&O BeoLab 1 Repair ManualTom Ruyle50% (2)
- Homework CH 5 2013Document5 pagesHomework CH 5 2013lephuckt100% (1)
- (Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #0 Due: Sunday, January 17Document2 pages(Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #0 Due: Sunday, January 17Nono Nono100% (1)
- Lab 2: Introduction To Image Processing: 1. GoalsDocument4 pagesLab 2: Introduction To Image Processing: 1. GoalsDoan Thanh ThienNo ratings yet
- Ass2 2022 2Document3 pagesAss2 2022 2saumya11599No ratings yet
- Ps 0Document2 pagesPs 0hsujustinNo ratings yet
- R7411211 Image ProcessingDocument2 pagesR7411211 Image ProcessingsivabharathamurthyNo ratings yet
- National Institute of Technology RourkelaDocument3 pagesNational Institute of Technology RourkelaRitunjay GuptaNo ratings yet
- Experiment 1: Digital ImageDocument17 pagesExperiment 1: Digital ImagehardikNo ratings yet
- EEE F435 - Compre - QDocument2 pagesEEE F435 - Compre - QNitish PutrevuNo ratings yet
- Assign I P 050209Document2 pagesAssign I P 050209Vinay100% (2)
- Image Processing MidsemDocument2 pagesImage Processing Midsem2022aspire379No ratings yet
- Assignment 4Document3 pagesAssignment 4Ece Ebru KayaNo ratings yet
- Worksheet Paper - Digital Images ProcessingDocument6 pagesWorksheet Paper - Digital Images Processingamir8ahamdNo ratings yet
- Experiment No.03: LAB Manual Part ADocument13 pagesExperiment No.03: LAB Manual Part AVedang GupteNo ratings yet
- VJ AplDocument5 pagesVJ AplIdeal VoltNo ratings yet
- SCS3003 2009Document5 pagesSCS3003 2009madhura480No ratings yet
- MIT18 02SC Pset4 PDFDocument4 pagesMIT18 02SC Pset4 PDFMahmoud AsemNo ratings yet
- 2019final IUP SampleAnswerDocument11 pages2019final IUP SampleAnswerGimhani KavishikaNo ratings yet
- CSE3010 CV Semester Supplementary 2023-24Document2 pagesCSE3010 CV Semester Supplementary 2023-24Saksham kumarNo ratings yet
- Lab ManualDocument13 pagesLab ManualcrpriyankhaaNo ratings yet
- Hw2-Vision14 SolutionDocument2 pagesHw2-Vision14 SolutionMohiuddin AhmadNo ratings yet
- DIP Lab Manual No 09Document22 pagesDIP Lab Manual No 09ShAh NawaZzNo ratings yet
- Gate-Cs 2008Document31 pagesGate-Cs 2008tomundaNo ratings yet
- Digital Image Processing: Fourth EditionDocument83 pagesDigital Image Processing: Fourth EditionIshtiaqNo ratings yet
- ROBT205-Lab 06 PDFDocument14 pagesROBT205-Lab 06 PDFrightheartedNo ratings yet
- Ce 490 Introduction To Digital Image Processing Midterm ExamDocument6 pagesCe 490 Introduction To Digital Image Processing Midterm Examsf121596No ratings yet
- Mtech 1ST Sem Csel0902 Ip 2021 EndsemDocument5 pagesMtech 1ST Sem Csel0902 Ip 2021 EndsemShimul BhattacharjeeNo ratings yet
- Dip Simp 2023Document4 pagesDip Simp 2023Kokila K RNo ratings yet
- 2017 EstDocument3 pages2017 EstAaryan AroraNo ratings yet
- Lab Model Question Paper With AnswersDocument16 pagesLab Model Question Paper With AnswersaadilsapheerNo ratings yet
- ExcercisesDocument3 pagesExcercisesIndrajeet TambeNo ratings yet
- Assignment 2 DIP 2019Document9 pagesAssignment 2 DIP 2019abhinav kumarNo ratings yet
- Endsem 17-18 NIT RKLDocument2 pagesEndsem 17-18 NIT RKLRitunjay GuptaNo ratings yet
- 2 Energy Methods and Basic 1D Finite Element MethodsDocument53 pages2 Energy Methods and Basic 1D Finite Element MethodsshivaNo ratings yet
- Btech All 8 Sem Digital Image Processing Pecs5406 2018Document2 pagesBtech All 8 Sem Digital Image Processing Pecs5406 2018parbati8984No ratings yet
- 12 Maths CBSE Sample Papers 2019Document16 pages12 Maths CBSE Sample Papers 2019Sanket SainiNo ratings yet
- 1011sem1 Me5405Document7 pages1011sem1 Me5405brugelionNo ratings yet
- Computer Aided Process Engineering LaboratoryDocument3 pagesComputer Aided Process Engineering LaboratoryPrateek JainNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument82 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu desat0112No ratings yet
- Lab #3 Digital Images: A/D and D/A: Shafaq Tauqir 198292Document12 pagesLab #3 Digital Images: A/D and D/A: Shafaq Tauqir 198292Rabail InKrediblNo ratings yet
- Ee610 hw2 Au23Document3 pagesEe610 hw2 Au23Manish kumawatNo ratings yet
- Exam 23 01Document20 pagesExam 23 01Haia Al SharifNo ratings yet
- CompreDocument2 pagesComprepranavjibhakateNo ratings yet
- Eng1060 Lab 2Document3 pagesEng1060 Lab 2yuya42No ratings yet
- Lecture Week 2B 2018 PDFDocument87 pagesLecture Week 2B 2018 PDFalfalfa manNo ratings yet
- EE 261 The Fourier Transform and Its Applications Fall 2007 Problem Set Nine Due Wednesday, December 5Document2 pagesEE 261 The Fourier Transform and Its Applications Fall 2007 Problem Set Nine Due Wednesday, December 5am1liNo ratings yet
- OR1 Review 2018Document39 pagesOR1 Review 2018Bella SyNo ratings yet
- Computational Mathematics - Problem Sheet 1: Sin XDocument1 pageComputational Mathematics - Problem Sheet 1: Sin XMayank KumarNo ratings yet
- VLE Modeling AssignmentDocument2 pagesVLE Modeling AssignmentscarlettNo ratings yet
- CS Sample Paper 3Document10 pagesCS Sample Paper 3SpreadSheetsNo ratings yet
- F - 2017 m6 Mod Ans 9Document4 pagesF - 2017 m6 Mod Ans 9Lamees ElghazolyNo ratings yet
- New Motion Estimation Algorithm Used in H.263+Document9 pagesNew Motion Estimation Algorithm Used in H.263+devaraj_tmNo ratings yet
- Basic Operations in Image Processing: ObjectivesDocument6 pagesBasic Operations in Image Processing: ObjectivesAamir ChohanNo ratings yet
- Blatt 03Document2 pagesBlatt 03Sanjita ChouhanNo ratings yet
- ps2 Report PDFDocument8 pagesps2 Report PDFTalha YILMAZNo ratings yet
- 1105 Pre-Class Assignment Week 1 Class 1 (Functions and Their Multiple Representations)Document5 pages1105 Pre-Class Assignment Week 1 Class 1 (Functions and Their Multiple Representations)Andres FernandezNo ratings yet
- Ktunotes - In: Apj Abdul Kalam Technological UniversityDocument21 pagesKtunotes - In: Apj Abdul Kalam Technological Universityনিবিড় অভ্রNo ratings yet
- Endterm IIP SolutionDocument4 pagesEndterm IIP SolutionSunidhi SharmaNo ratings yet
- Practical Finite Element Modeling in Earth Science using MatlabFrom EverandPractical Finite Element Modeling in Earth Science using MatlabNo ratings yet
- Owner'S Manual: FE103-Sol Main FeaturesDocument4 pagesOwner'S Manual: FE103-Sol Main FeaturesVictor GanNo ratings yet
- Lab 2 BFSK and QAM Matlab SimulationDocument3 pagesLab 2 BFSK and QAM Matlab SimulationMichael HsiaoNo ratings yet
- Bay Bloor Radio Boxing Week 2020Document19 pagesBay Bloor Radio Boxing Week 2020Bay Bloor RadioNo ratings yet
- A Website Devoted To The Legacy of Bob Carver's Electronics: Dedicated Forum MembersDocument21 pagesA Website Devoted To The Legacy of Bob Carver's Electronics: Dedicated Forum MembersMilan TrengovskiNo ratings yet
- Cognitive Radio System: 1. Square-Root Raised Cosinefilter User Define FunctionDocument8 pagesCognitive Radio System: 1. Square-Root Raised Cosinefilter User Define FunctionsurvivalofthepolyNo ratings yet
- Multimedia - LECTURE 2Document68 pagesMultimedia - LECTURE 2Hemed hafidhNo ratings yet
- Data MiningDocument5 pagesData MiningbhumeshwaNo ratings yet
- AllenHeathGLD TrainingManualDocument4 pagesAllenHeathGLD TrainingManualPeter XuNo ratings yet
- Boss ME-70 Training Guide ManualDocument13 pagesBoss ME-70 Training Guide ManualShivamSinghaNo ratings yet
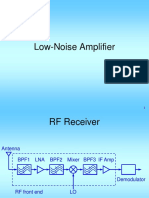
- Low NoiseamplifierDocument115 pagesLow NoiseamplifierVedran IbrahimovicNo ratings yet
- Loudspeaker U-MaxxBass in SubwoofersDocument6 pagesLoudspeaker U-MaxxBass in Subwooferstotoymola8No ratings yet
- 6601 ManualDocument92 pages6601 ManualmacgaiverNo ratings yet
- RF Architectures & Digital Signal Processing Aspects of Digital Wireless TransceiversDocument20 pagesRF Architectures & Digital Signal Processing Aspects of Digital Wireless TransceiversCassio Jose FonsecaNo ratings yet
- A Review On Empirical Mode Decomposition in Fault DiagnosisDocument19 pagesA Review On Empirical Mode Decomposition in Fault DiagnosisEr Bhartendra ShahNo ratings yet
- MmwaveSensing FMCW Offlineviewing 0Document70 pagesMmwaveSensing FMCW Offlineviewing 0ppengNo ratings yet
- Experiment-3 (AM-SSB-SC Modulation & Demodulation) : Simulink Based ExperimentsDocument7 pagesExperiment-3 (AM-SSB-SC Modulation & Demodulation) : Simulink Based ExperimentsHARSH PALLAV GOVIND RAONo ratings yet
- Registration Preview: Anna University:: Chennai 600025 Application For Nov. / Dec. Examination, 2022 ExaminationDocument19 pagesRegistration Preview: Anna University:: Chennai 600025 Application For Nov. / Dec. Examination, 2022 ExaminationARUNKUMAR CHELLAPPANo ratings yet
- DH200EDocument2 pagesDH200ETincho BertaNo ratings yet
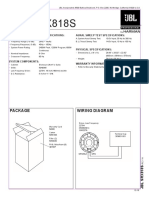
- JBL Srx818S: Technical ManualDocument4 pagesJBL Srx818S: Technical ManualGobitobiNo ratings yet
- Introduction To Digital AudioDocument15 pagesIntroduction To Digital AudioJonah Grace MejasNo ratings yet
- GATE ECE 2000 Actual PaperDocument23 pagesGATE ECE 2000 Actual PaperTushar GuptaNo ratings yet
- Mpeg-2 Encoding and Most Common PROFILES: 4:2:0 (MP@ML) AND 4:2:2Document4 pagesMpeg-2 Encoding and Most Common PROFILES: 4:2:0 (MP@ML) AND 4:2:2JUANNo ratings yet
- Filter Design TechniquesDocument25 pagesFilter Design TechniquesAjay LoboNo ratings yet
- Ad7654 1501796 PDFDocument28 pagesAd7654 1501796 PDFDorisjuarsa SmsNo ratings yet
- Mri ArtifactsDocument59 pagesMri ArtifactsMarc Michael Dela Cruz100% (1)
- Ecet 310 FinalDocument11 pagesEcet 310 FinalXxKrazyJokerxX100% (1)
- Method For Calculating and Using The Noise Reduction Rating - NRR PDFDocument11 pagesMethod For Calculating and Using The Noise Reduction Rating - NRR PDFAnonymous G6ceYCzwtNo ratings yet