Download as pdf or txt
You might also like
- 03 9609 22 MS Prov RmaDocument25 pages03 9609 22 MS Prov RmaKalsoom SoniNo ratings yet
- English: Quarter 2 - Module 3Document21 pagesEnglish: Quarter 2 - Module 3Emer Perez100% (12)
- Home Theater Working DrawingsDocument1 pageHome Theater Working DrawingsAcoustics GlobalNo ratings yet
- Environmental Modelling & Software: Guojie Wang, Damien Garcia, Yi Liu, Richard de Jeu, A. Johannes DolmanDocument4 pagesEnvironmental Modelling & Software: Guojie Wang, Damien Garcia, Yi Liu, Richard de Jeu, A. Johannes DolmanhengziNo ratings yet
- Present Status of Soil Moisture EstimationDocument22 pagesPresent Status of Soil Moisture EstimationcbuuwfbuwebfwiNo ratings yet
- 494Document13 pages494Rajarshi DattaNo ratings yet
- Sadeghi, Jones, Philpot - 2015 - A Linear Physically-Based Model For Remote Sensing of Soil Moisture Using Short Wave Infrared BandsDocument11 pagesSadeghi, Jones, Philpot - 2015 - A Linear Physically-Based Model For Remote Sensing of Soil Moisture Using Short Wave Infrared BandsKandy CacyavilcaNo ratings yet
- Brocca 2018 IrrigationDocument15 pagesBrocca 2018 IrrigationMKEBRENo ratings yet
- A New Data Assimilation Approach For Improving Runoff PredictionDocument16 pagesA New Data Assimilation Approach For Improving Runoff PredictioncbuuwfbuwebfwiNo ratings yet
- Journal of HydrologyDocument10 pagesJournal of HydrologyandrewNo ratings yet
- Boutal 2018Document16 pagesBoutal 2018lozaNo ratings yet
- Operational Readiness of Microwave Remote Sensing of Soil Moisture For Hydrologic ApplicationsDocument20 pagesOperational Readiness of Microwave Remote Sensing of Soil Moisture For Hydrologic ApplicationsEnglish LearnerNo ratings yet
- Remotesensing 15 01531Document21 pagesRemotesensing 15 01531Suradi MRNo ratings yet
- International Journal of Applied Earth Observation and GeoinformationDocument10 pagesInternational Journal of Applied Earth Observation and GeoinformationjhonNo ratings yet
- Remote Sensing: Hydrology: Progress in Physical Geography October 2009Document21 pagesRemote Sensing: Hydrology: Progress in Physical Geography October 2009Gagandeep Singh ChandelNo ratings yet
- Feasibility of Downscaling Satellite-Based Precipitation Estimates Using Soil Moisture Derived From Land Surface TemperatureDocument19 pagesFeasibility of Downscaling Satellite-Based Precipitation Estimates Using Soil Moisture Derived From Land Surface TemperatureSuradi MRNo ratings yet
- Ibcast47879 2020 9044560Document15 pagesIbcast47879 2020 9044560Bagus Dwi CahyoNo ratings yet
- 1 s2.0 S0273117714002658 MainDocument15 pages1 s2.0 S0273117714002658 MainDean SpearsNo ratings yet
- A Three-Dimensional Gap Filling Method For Large Geophysical DatasetsDocument5 pagesA Three-Dimensional Gap Filling Method For Large Geophysical DatasetsDinibel PérezNo ratings yet
- Remotesensing 11 00190Document5 pagesRemotesensing 11 00190cbuuwfbuwebfwiNo ratings yet
- Research PlanDocument20 pagesResearch PlanALEMSHET BELAYNEHNo ratings yet
- J Rse 2020 111740Document15 pagesJ Rse 2020 111740HarshitSinghNo ratings yet
- 2023 Alamdar Et Al. Efficiency of Machine Learning Algorithms in Soil SalinityDocument7 pages2023 Alamdar Et Al. Efficiency of Machine Learning Algorithms in Soil Salinitykhamidovabbos23No ratings yet
- Mackayetal 2014 ManuscriptDocument50 pagesMackayetal 2014 ManuscriptSunil KumarNo ratings yet
- An Improved Global Remote-Sensing-Based Surface Soil Moisture (RSSSM) Dataset Covering 2003-2018Document31 pagesAn Improved Global Remote-Sensing-Based Surface Soil Moisture (RSSSM) Dataset Covering 2003-2018kaikui caiNo ratings yet
- Bartlett 2016Document20 pagesBartlett 2016Jostiin NmNo ratings yet
- Nhess 2016 339Document35 pagesNhess 2016 339Vanessa LopezNo ratings yet
- Assimilation of Remote Sensing and Hydrological DataDocument8 pagesAssimilation of Remote Sensing and Hydrological DataVictor Gallo RamosNo ratings yet
- Research ArticleDocument12 pagesResearch ArticlelataNo ratings yet
- Wang Et Al-2014-International Journal of ClimatologyDocument7 pagesWang Et Al-2014-International Journal of ClimatologyBaharNo ratings yet
- Root-Zone Soil Moisture Estimation Based On Remote Sensing Data and Deep Learning - ScienceDirectDocument7 pagesRoot-Zone Soil Moisture Estimation Based On Remote Sensing Data and Deep Learning - ScienceDirectHOD PhysicsNo ratings yet
- Cosp 2011Document22 pagesCosp 2011zstos vmNo ratings yet
- Abdulrahim Fatimah Presentation PosterDocument1 pageAbdulrahim Fatimah Presentation Posterchukwuemeka victorNo ratings yet
- Full TextDocument11 pagesFull TextmarinewaveNo ratings yet
- Soil Moisture Retrieval Using Convolutional Neural Networks: Application To Passive Microwave Remote SensingDocument4 pagesSoil Moisture Retrieval Using Convolutional Neural Networks: Application To Passive Microwave Remote SensingasdNo ratings yet
- Geoscience Frontiers: B.P. Ganasri, H. RameshDocument9 pagesGeoscience Frontiers: B.P. Ganasri, H. Rameshvenkatraman20No ratings yet
- An Efficient Approach To Modeling The Topographic Control of Surface Hydrology For Regional and Global Climate Modeling, Marc Stieglitz, 1997Document20 pagesAn Efficient Approach To Modeling The Topographic Control of Surface Hydrology For Regional and Global Climate Modeling, Marc Stieglitz, 1997Faregh WailNo ratings yet
- Reviews of Geophysics - 2017 - Sun - A Review of Global Precipitation Data Sets Data Sources Estimation andDocument29 pagesReviews of Geophysics - 2017 - Sun - A Review of Global Precipitation Data Sets Data Sources Estimation andSubhra Sekhar MaityNo ratings yet
- Journal of HydrologyDocument11 pagesJournal of HydrologyADAMNo ratings yet
- Groundwater - 2023 - Swilley - Continental Scale Hydrostratigraphy Comparing Geologically Informed Data Products ToDocument18 pagesGroundwater - 2023 - Swilley - Continental Scale Hydrostratigraphy Comparing Geologically Informed Data Products TorobertodisantoloedpNo ratings yet
- s10040 023 02686 7Document18 pagess10040 023 02686 7Nguyễn Đàm Quốc HuyNo ratings yet
- Spatial and Temporal Deep Learning Methods For De-Wageningen University and Research 551332Document18 pagesSpatial and Temporal Deep Learning Methods For De-Wageningen University and Research 551332akhilchibberNo ratings yet
- 2014 Utilizing The Onset of Time-Lapse Changes A Robust Basis For ReservoirDocument15 pages2014 Utilizing The Onset of Time-Lapse Changes A Robust Basis For ReservoirGeofisika Sumber DayaNo ratings yet
- Environmental Modelling & Software: Tan Zi, Mukesh Kumar, Gerard Kiely, Ciaran Lewis, John AlbertsonDocument16 pagesEnvironmental Modelling & Software: Tan Zi, Mukesh Kumar, Gerard Kiely, Ciaran Lewis, John AlbertsonYenifer Rodriguez CorreaNo ratings yet
- PDF Conf p61 s4 04 Kidd VDocument5 pagesPDF Conf p61 s4 04 Kidd VAyan SantraNo ratings yet
- Water: Using UAV Visible Images To Estimate The Soil Moisture of SteppeDocument17 pagesWater: Using UAV Visible Images To Estimate The Soil Moisture of SteppeCareerDev VietnamNo ratings yet
- Different Methods For Spatial Interpolation of Rainfall Data For Operational Hydrology and Hydrological Modeling at Watershed Scale. A ReviewDocument15 pagesDifferent Methods For Spatial Interpolation of Rainfall Data For Operational Hydrology and Hydrological Modeling at Watershed Scale. A Reviewsebastian Cisternas GuzmanNo ratings yet
- Digital Soil Map of The WorldDocument3 pagesDigital Soil Map of The WorldBenjamin GossweilerNo ratings yet
- Water 09 00530 With CoverDocument6 pagesWater 09 00530 With CovercbuuwfbuwebfwiNo ratings yet
- The Optical Trapezoid Model A Novel Approach To Remote Sensing of Soil Moisture Applied To Sentinel-2 and Landsat-8 ObservationDocument17 pagesThe Optical Trapezoid Model A Novel Approach To Remote Sensing of Soil Moisture Applied To Sentinel-2 and Landsat-8 ObservationTeddy Arfaansyah PutraNo ratings yet
- Delineation of Groundwater Potential Zones Using Cokriging and Weighted Overlay Techniques in The Assin Municipalities of GhanaDocument15 pagesDelineation of Groundwater Potential Zones Using Cokriging and Weighted Overlay Techniques in The Assin Municipalities of GhanaShashank VayfalNo ratings yet
- Direct Measurement and Prediction of Bulk Density On Alluvial Soil in IshiaguDocument28 pagesDirect Measurement and Prediction of Bulk Density On Alluvial Soil in IshiaguMajestyNo ratings yet
- A Fully Automatic and High Accuracy Surface Water Mapping Framework On Google Earth Engine Using Landsat Time SeriesDocument25 pagesA Fully Automatic and High Accuracy Surface Water Mapping Framework On Google Earth Engine Using Landsat Time Seriesyunitaratih61No ratings yet
- Continuous Change Detection and Classification of Land Cover Using All Available Landsat DataDocument20 pagesContinuous Change Detection and Classification of Land Cover Using All Available Landsat DataIvanNo ratings yet
- Geophysical Research LettersDocument10 pagesGeophysical Research Letterskaikui caiNo ratings yet
- Simulation of Rainfall (ANN) and Field Plots Data: Runoff Process Using An Artificial Neural NetworkDocument12 pagesSimulation of Rainfall (ANN) and Field Plots Data: Runoff Process Using An Artificial Neural NetworkKuldeep JadhavNo ratings yet
- Lebourge OiDocument12 pagesLebourge OiAna FláviaNo ratings yet
- Assessment of The Consistency Among Global Precipi - 2017 - Journal of HydrologyDocument14 pagesAssessment of The Consistency Among Global Precipi - 2017 - Journal of HydrologyAhmed SayedNo ratings yet
- 1 Mapping The World's Coral Reefs Using A Global Multiscaleearth Observation FrameworkDocument12 pages1 Mapping The World's Coral Reefs Using A Global Multiscaleearth Observation FrameworkVINESSE JUMAWIDNo ratings yet
- 1 s2.0 S0303243419304672 MainDocument12 pages1 s2.0 S0303243419304672 MainAgus Setyo MuntoharNo ratings yet
- Rev010 PDFDocument18 pagesRev010 PDFLuchin Lopez MerinoNo ratings yet
- Development and Evaluation of 005 Terrestrial WateDocument24 pagesDevelopment and Evaluation of 005 Terrestrial Watevishakh adolphNo ratings yet
- Plot Scale Models and Their Application to Recharge Studies - Part 10From EverandPlot Scale Models and Their Application to Recharge Studies - Part 10No ratings yet
- The Influence of Systemic Hypoxia and Reoxygenation On The GlutaDocument5 pagesThe Influence of Systemic Hypoxia and Reoxygenation On The GlutaAndana TrisaviNo ratings yet
- Wireless In-Building Communication Using An Array of MicrodevicesDocument6 pagesWireless In-Building Communication Using An Array of MicrodevicesAndana TrisaviNo ratings yet
- Non-Invasive Positive Pressure Ventilation in Acute Respiratory Failure: Providing Competent CareDocument9 pagesNon-Invasive Positive Pressure Ventilation in Acute Respiratory Failure: Providing Competent CareAndana TrisaviNo ratings yet
- Mah 2020Document2 pagesMah 2020Andana TrisaviNo ratings yet
- Systematic Review and Meta-Analysis: The Science of Early-Life Precursors and Interventions For Attention-De Ficit/hyperactivity DisorderDocument40 pagesSystematic Review and Meta-Analysis: The Science of Early-Life Precursors and Interventions For Attention-De Ficit/hyperactivity DisorderAndana TrisaviNo ratings yet
- Preventive Medicine: Rosana Poggio, Carolina Prado, Marilina Santero, Analía Nejamis, Laura Gutierrez, Vilma IrazolaDocument7 pagesPreventive Medicine: Rosana Poggio, Carolina Prado, Marilina Santero, Analía Nejamis, Laura Gutierrez, Vilma IrazolaAndana TrisaviNo ratings yet
- Miller 2014Document5 pagesMiller 2014Andana TrisaviNo ratings yet
- MOST 3rd RevisionDocument654 pagesMOST 3rd RevisionLavanya Bhat100% (1)
- C700D5 - SpecsDocument17 pagesC700D5 - SpecsElias Abou FakhrNo ratings yet
- Method Statement - Relocate Street LightingDocument6 pagesMethod Statement - Relocate Street Lightingahmad.nazareeNo ratings yet
- MyobDocument3 pagesMyobNadya RamhadaniNo ratings yet
- G3 Success With Math TestsDocument58 pagesG3 Success With Math TestsNgoc Mai100% (2)
- Business Spotlight Space Exploration Adv. SSDocument6 pagesBusiness Spotlight Space Exploration Adv. SSDaniel NazwiskoNo ratings yet
- MapmyIndia Google Distance MatrixDocument3 pagesMapmyIndia Google Distance Matrixrama.j266No ratings yet
- Activity 3 EntrepDocument2 pagesActivity 3 EntrepCHLOE ANNE CORDIALNo ratings yet
- Teaching Vocabulrary SskillDocument463 pagesTeaching Vocabulrary SskillJoAnne K. ANo ratings yet
- Manual XolidoSign V 2 2 1 en Signed by XOLIDO SYSTEMSDocument57 pagesManual XolidoSign V 2 2 1 en Signed by XOLIDO SYSTEMSΠαναγιώτης Παυλ. ΜαρούδαςNo ratings yet
- Saha, 2003Document16 pagesSaha, 2003LA ArenqueNo ratings yet
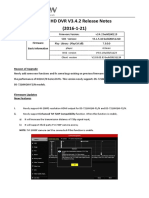
- Turbo HD DVR V3.4.2 Release Notes - ExternalDocument3 pagesTurbo HD DVR V3.4.2 Release Notes - Externalcrishtopher saenzNo ratings yet
- Citation CJ4 - Checklist Working TitleDocument3 pagesCitation CJ4 - Checklist Working TitlePhilippe MagnoNo ratings yet
- HDMI Cable Modeling and Analysis With TDR DataDocument9 pagesHDMI Cable Modeling and Analysis With TDR DataAmmar AbdullahNo ratings yet
- C6501 - User's Guide (Security)Document32 pagesC6501 - User's Guide (Security)Salih AnwarNo ratings yet
- Teaching GrammarDocument22 pagesTeaching GrammarMUHAMMAD RAFFINo ratings yet
- TraceDocument2,936 pagesTraceMarisa Tamba.2005No ratings yet
- Alpolic Cladding Panel PDFDocument5 pagesAlpolic Cladding Panel PDFdep_vinNo ratings yet
- Pengembangan Lembar Kerja Siswa Berbasis Pendekatan Open-Ended Untuk Memfasilitasi Kemampuan Berpikir Kreatif Matematis Siswa Madrasah TsanawiyahDocument11 pagesPengembangan Lembar Kerja Siswa Berbasis Pendekatan Open-Ended Untuk Memfasilitasi Kemampuan Berpikir Kreatif Matematis Siswa Madrasah Tsanawiyaherdawati nurdinNo ratings yet
- Listening Treatment in The BasicDocument48 pagesListening Treatment in The BasicAlfikriNo ratings yet
- FabFilter Volcano 2Document43 pagesFabFilter Volcano 2David Esteves RuizNo ratings yet
- Review Module-Reinforced Concrete Design (RCD Columns-USD)Document1 pageReview Module-Reinforced Concrete Design (RCD Columns-USD)Joseph Lanto100% (1)
- Soft Ferrite Cores User Guide PDFDocument52 pagesSoft Ferrite Cores User Guide PDFPrithvi ScorpNo ratings yet
- Maxima Manual: Version 5.41.0aDocument1,172 pagesMaxima Manual: Version 5.41.0aRikárdo CamposNo ratings yet
- Carlyn Shear ResumeDocument1 pageCarlyn Shear ResumecarlynshearNo ratings yet
- 555 Timers With PSpice LabDocument6 pages555 Timers With PSpice LabHatem MOKHTARI0% (1)
- Tips On UpcatDocument5 pagesTips On UpcatAira Mae AloverosNo ratings yet