Download as docx, pdf, or txt
You might also like
- Mechanikos Fizikiniai Pagrindai (Mokslobaze - LT)Document11 pagesMechanikos Fizikiniai Pagrindai (Mokslobaze - LT)Sylwester RynkiewiczNo ratings yet
- Laidininko Savitosios Varzos NustatymasDocument2 pagesLaidininko Savitosios Varzos NustatymasJustasVanagasNo ratings yet
- Tiesioginių Ir Netiesioginių Matavimų Paklaidų ĮvertinimasDocument2 pagesTiesioginių Ir Netiesioginių Matavimų Paklaidų ĮvertinimasZilvinas Absentas50% (2)
- 11 Paprastieji Mechanizmai PPT 115Document37 pages11 Paprastieji Mechanizmai PPT 115SenseiNo ratings yet
- Kursinis PlonasienesDocument64 pagesKursinis PlonasienesTadasNo ratings yet
- Laboratorinio Darbo Atsiskaitymo PavyzdysDocument2 pagesLaboratorinio Darbo Atsiskaitymo PavyzdysErnestas VarnasNo ratings yet
- Fizikos Formuliu RinkinysDocument11 pagesFizikos Formuliu RinkinysUgneBaskutyteNo ratings yet
- Fizikine1 2017pdf PDFDocument38 pagesFizikine1 2017pdf PDFMilana AugustauskaitėNo ratings yet
- NR 3Document4 pagesNR 3mNo ratings yet
- Sukamojo Judėjimo Dėsnio TikrinimasDocument5 pagesSukamojo Judėjimo Dėsnio TikrinimasarnascxzNo ratings yet
- Fizikos LabDocument8 pagesFizikos LabRamunas13MNo ratings yet
- 9 Laboratorinio Darbo AtaskaitaDocument4 pages9 Laboratorinio Darbo AtaskaitaEimantas PakalnisNo ratings yet
- Maksvelio Svyruoklės Inercijos Momentas Laboratorinis DarbasDocument2 pagesMaksvelio Svyruoklės Inercijos Momentas Laboratorinis DarbasvadikNo ratings yet
- 9 Laboratorinio Darbo AtaskaitaDocument4 pages9 Laboratorinio Darbo AtaskaitaEimantas PakalnisNo ratings yet
- Sukamojo Judėjimo Dinamikos Dėsnio TikrinimasDocument4 pagesSukamojo Judėjimo Dinamikos Dėsnio TikrinimasPaulinaSnNo ratings yet
- Fizikos 2 LABORDocument4 pagesFizikos 2 LABORhello100% (1)
- Kietojo Kūno Sukamojo Judėjimo Dinamikos Pagrindinio Dėsnio TikrinimasDocument3 pagesKietojo Kūno Sukamojo Judėjimo Dinamikos Pagrindinio Dėsnio TikrinimasLiutauras Butkus100% (1)
- Slopinamuju Svyravimu Tyrimas Spyruokline Svytuokle LaboratorinisDocument4 pagesSlopinamuju Svyravimu Tyrimas Spyruokline Svytuokle LaboratorinisTomas SlančiauskasNo ratings yet
- Kūno Laisvojo Kritimo Laboratorinis DarbasDocument2 pagesKūno Laisvojo Kritimo Laboratorinis DarbasvadikNo ratings yet
- 7 Laboratorinio Darbo AtaskaitaDocument3 pages7 Laboratorinio Darbo AtaskaitaEimantas PakalnisNo ratings yet
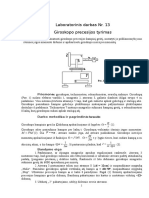
- Giroskopo Precesijos Tyrimas LaboratorinisDocument2 pagesGiroskopo Precesijos Tyrimas LaboratorinisRokas GrabauskasNo ratings yet
- Namu Darbas 4 - 230116Document3 pagesNamu Darbas 4 - 230116Lefi LefiNo ratings yet
- 4 Laboratorinis Sverto Pusiausviros Taisykle (Auto-Saved)Document8 pages4 Laboratorinis Sverto Pusiausviros Taisykle (Auto-Saved)pepe_ilgakojineNo ratings yet
- Evaldas D. Atvudo MasinaDocument4 pagesEvaldas D. Atvudo MasinaEvaldas DološickijNo ratings yet
- Electronic Engineering Lab.Document5 pagesElectronic Engineering Lab.CatzNo ratings yet
- Tiesioginių Ir Netiesioginių Matavimo Paklaidų ĮvertinimasDocument3 pagesTiesioginių Ir Netiesioginių Matavimo Paklaidų ĮvertinimasErika ŠumauskaitėNo ratings yet
- Problemine Uzduotis Elektromobilis (Mokslobaze - LT)Document18 pagesProblemine Uzduotis Elektromobilis (Mokslobaze - LT)RyzasNo ratings yet
- Tiesioginių Ir Netiesioginių Paklaidų ĮvertinimasDocument4 pagesTiesioginių Ir Netiesioginių Paklaidų ĮvertinimasNedas VaiciunasNo ratings yet
- M.M.T Kursinis ProjektasDocument53 pagesM.M.T Kursinis ProjektasLukas ČeglysNo ratings yet
- Tolygiai Greitėjančio Kūno Pagreičio RadimasDocument7 pagesTolygiai Greitėjančio Kūno Pagreičio RadimasОлександра КабаченкоNo ratings yet
- Matematika 12. Mokytojo Knyga (Without Missing Pages)Document153 pagesMatematika 12. Mokytojo Knyga (Without Missing Pages)TomasNo ratings yet
- Fizikos Laboratorinis DarbasDocument2 pagesFizikos Laboratorinis DarbasVilte GadliauskaiteNo ratings yet
- Atvudo MašinaDocument3 pagesAtvudo MašinaLukas GudelaitisNo ratings yet
- Laboratrinis Fizika 11. TIESIOGINIŲ IR NETIESIOGINIŲ MATAVIMŲ PAKLAIDŲ ĮVERTINIMASDocument4 pagesLaboratrinis Fizika 11. TIESIOGINIŲ IR NETIESIOGINIŲ MATAVIMŲ PAKLAIDŲ ĮVERTINIMASMantvydas123No ratings yet
- 2 Laboratorinio Darbo Ataskaita Martin PatobulintaDocument8 pages2 Laboratorinio Darbo Ataskaita Martin PatobulintaEimantas PakalnisNo ratings yet
- 1 Lab. D.Document2 pages1 Lab. D.salnike165No ratings yet
- Kritinis Veleno Greitis ReferatsDocument3 pagesKritinis Veleno Greitis ReferatsLaura ŽižytėNo ratings yet
- 2016 M. 64 Fizikos Olimpiados Uzduotys Ir Sprendimai 11 KL PDFDocument4 pages2016 M. 64 Fizikos Olimpiados Uzduotys Ir Sprendimai 11 KL PDFYuuji ChenNo ratings yet
- LD 10 AtaskDocument4 pagesLD 10 AtaskBumo BumasNo ratings yet
- Balistine Svyruokle 1Document3 pagesBalistine Svyruokle 1Marius PakėnasNo ratings yet
- Lenkiamų Elementų Patikros Šalutinė Ir Pagrindinė SijaDocument7 pagesLenkiamų Elementų Patikros Šalutinė Ir Pagrindinė Sijaa.lazarenkaNo ratings yet
- Atvudo Masina02Document3 pagesAtvudo Masina02Osvaldas SvipasNo ratings yet
- 2 Laboratorinis Darbas.Document3 pages2 Laboratorinis Darbas.ViliusSakalauskasNo ratings yet
- Matemetinė Svyruokle Laboratorinis DarbasDocument3 pagesMatemetinė Svyruokle Laboratorinis DarbasvadikNo ratings yet
- Antras Laboratorinis Darbas - Hidrostatinio Slėgio Atstojamosios Jėgos Tyrimai JTGMF JNSI 19 Kristijonas Zenkevičius 2021-05-13Document3 pagesAntras Laboratorinis Darbas - Hidrostatinio Slėgio Atstojamosios Jėgos Tyrimai JTGMF JNSI 19 Kristijonas Zenkevičius 2021-05-13Kristijonas ZenkeviciusNo ratings yet
- Fiz Val EgzDocument96 pagesFiz Val EgzMantas SmaidrysNo ratings yet
- Trigo No Metri JaDocument3 pagesTrigo No Metri JaSmiltė SamuolaitytėNo ratings yet
- Atvudo MasinaDocument3 pagesAtvudo Masinap_tatarunasNo ratings yet
- Uzdaviniu PavyzdziaiDocument1 pageUzdaviniu PavyzdziaiNojus SkukauskasNo ratings yet
- Garso Greičio Ore Matavimas Kundto MetoduDocument3 pagesGarso Greičio Ore Matavimas Kundto MetoduPaulinaSnNo ratings yet
- Viešbučio Skaiciavimai KolonosDocument11 pagesViešbučio Skaiciavimai Kolonosa.lazarenkaNo ratings yet
- Matematika Ir Statistika PDFDocument80 pagesMatematika Ir Statistika PDFMindaugas VosiliusNo ratings yet
- Laboratorinis Darbas Elektrinio Virdulio Naudingumo Koeficiento NustatymasDocument4 pagesLaboratorinis Darbas Elektrinio Virdulio Naudingumo Koeficiento NustatymasemilijustulabiusNo ratings yet
- 2 Laboratorinio Darbo Ataskaita 1.2Document8 pages2 Laboratorinio Darbo Ataskaita 1.2Eimantas PakalnisNo ratings yet
- 1 Įvadas AtomasDocument71 pages1 Įvadas AtomasJonas JurgaitisNo ratings yet
- Elastingumo Modulis Laboratorinis DarbasDocument3 pagesElastingumo Modulis Laboratorinis DarbasvadikNo ratings yet
- Paulius Burokas THM 1 HWDocument7 pagesPaulius Burokas THM 1 HWPaulius Burokas (Asterix05)No ratings yet
- 8-Dinamometro Gradavimas - PPT - 17Document56 pages8-Dinamometro Gradavimas - PPT - 17Marijus AdomonisNo ratings yet
- 9 SvyravimaiDocument53 pages9 SvyravimaitaikietisNo ratings yet