Download as docx, pdf, or txt
You might also like
- Mach-Zehnder Interferometer - WikipediaDocument7 pagesMach-Zehnder Interferometer - WikipediaAndreiCabaNo ratings yet
- Report Block C.1 - Moises BarberaDocument7 pagesReport Block C.1 - Moises BarberaSha 547No ratings yet
- Dissociation Energy of Iodine by Absorption SpectroscopyFINALDocument12 pagesDissociation Energy of Iodine by Absorption SpectroscopyFINALwillharvey94100% (1)
- Decision-Making Competence in Everyday Life.Document6 pagesDecision-Making Competence in Everyday Life.Chelsea AcostaNo ratings yet
- Geospatial JeopardyDocument54 pagesGeospatial JeopardyrunnealsNo ratings yet
- An Estimate of The Absolute Velocity of The Earth in The Ecliptic PlaneDocument16 pagesAn Estimate of The Absolute Velocity of The Earth in The Ecliptic PlaneAnthony RussoNo ratings yet
- K. Schwab, N. Bruckner and R. Packard - Detection of Absolute Rotation Using Superfluid 4-HeDocument3 pagesK. Schwab, N. Bruckner and R. Packard - Detection of Absolute Rotation Using Superfluid 4-HeJellomaNo ratings yet
- Yash Ramchandani - Extended Essay FinalDocument32 pagesYash Ramchandani - Extended Essay FinalSelina LINo ratings yet
- PhysRevLett 108 19430نDocument5 pagesPhysRevLett 108 19430نcampal123No ratings yet
- Doppler Frequency Shift ofDocument2 pagesDoppler Frequency Shift ofsmpn1 PandanarumNo ratings yet
- Simulating Radial Velocity Method For Exoplanet DetectionDocument8 pagesSimulating Radial Velocity Method For Exoplanet DetectionLissan PythonNo ratings yet
- Circular Motion and GravitationDocument5 pagesCircular Motion and Gravitationhadukenryu9761No ratings yet
- Doppler-Free Saturated Absorption Spectroscopy of Stable Rubidium Isotopes 85 and 87Document5 pagesDoppler-Free Saturated Absorption Spectroscopy of Stable Rubidium Isotopes 85 and 87Josh FrechemNo ratings yet
- Geophone PaperDocument8 pagesGeophone PaperYoggie Surya PradanaNo ratings yet
- Laser Doppler VelocimeterDocument8 pagesLaser Doppler VelocimeterAhmed EhabNo ratings yet
- Laser Gyro Sagnac EffectDocument9 pagesLaser Gyro Sagnac EffectNathan LeonardNo ratings yet
- Plasma Rotation Measurement in Small Tokamaks Using An Optical Spectrometer and A Single Photomultiplier As DetectorDocument6 pagesPlasma Rotation Measurement in Small Tokamaks Using An Optical Spectrometer and A Single Photomultiplier As DetectordougnovaesNo ratings yet
- Rosenzweig 2005 671Document21 pagesRosenzweig 2005 671Particle Beam Physics LabNo ratings yet
- JIT 2016 - DopplerDocument12 pagesJIT 2016 - Dopplertapopaj919No ratings yet
- A Foucaults Pendulum DesignDocument4 pagesA Foucaults Pendulum DesignAldrin HernandezNo ratings yet
- Optic Magnetometers2Document8 pagesOptic Magnetometers2onynhoNo ratings yet
- Ives - Stilwell Experiment Fundamentally FlawedDocument22 pagesIves - Stilwell Experiment Fundamentally FlawedAymeric FerecNo ratings yet
- Optica Articulo 1Document5 pagesOptica Articulo 1james3030No ratings yet
- Doppler ShiftDocument9 pagesDoppler Shiftkumar1968No ratings yet
- 8 Ultrasonics: Mechanical MethodDocument6 pages8 Ultrasonics: Mechanical MethodShank ManNo ratings yet
- Diffraction ExperimentsDocument5 pagesDiffraction ExperimentsArooj Mukarram100% (2)
- Sensors: Development of A Space-Charge-Sensing SystemDocument13 pagesSensors: Development of A Space-Charge-Sensing SystemKojiro HadateNo ratings yet
- Longitudinal Profile Diagnostic Scheme With Subfemtosecond Resolution For High-Brightness Electron BeamsDocument8 pagesLongitudinal Profile Diagnostic Scheme With Subfemtosecond Resolution For High-Brightness Electron BeamsParticle Beam Physics LabNo ratings yet
- 1206 6969 PDFDocument23 pages1206 6969 PDFcherineNo ratings yet
- A Simplified Approach To Synchrotron RadiationDocument8 pagesA Simplified Approach To Synchrotron RadiationFaisal AmirNo ratings yet
- An Experimental Study of The Rate of A Moving Atomic Clock - Herbert E. Ives & G.R StilwellDocument12 pagesAn Experimental Study of The Rate of A Moving Atomic Clock - Herbert E. Ives & G.R StilwellJuan SNo ratings yet
- Propagation of WavesDocument19 pagesPropagation of WavesBIRENDRA BHARDWAJNo ratings yet
- Exploration of Wave Properties in Solids With UltrasoundDocument21 pagesExploration of Wave Properties in Solids With UltrasoundPhilip I. ThomasNo ratings yet
- Photonic Aspects of Dowsing and Feng ShuiDocument10 pagesPhotonic Aspects of Dowsing and Feng Shuimkrinker1296No ratings yet
- 2005-Laser Doppler Velocimetry Based On The Photoacoustic Effect in A CO2 LaserDocument4 pages2005-Laser Doppler Velocimetry Based On The Photoacoustic Effect in A CO2 LaserAndrés Oswaldo Rivera HérnandezNo ratings yet
- Earth-Rotation Aperture Synthesis: Edward FomalontDocument10 pagesEarth-Rotation Aperture Synthesis: Edward FomalonttesteurNo ratings yet
- Interference Measurement of Superposition of Laser-Induced Shock Waves in WaterDocument4 pagesInterference Measurement of Superposition of Laser-Induced Shock Waves in Waterbluefe784294No ratings yet
- High-Efficiency and Wide-Bandwidth Linear PolarizaDocument7 pagesHigh-Efficiency and Wide-Bandwidth Linear PolarizaRASHMI KISKUNo ratings yet
- Carpick 2006 ReviewOfSci - Instruments77 033706 PDFDocument7 pagesCarpick 2006 ReviewOfSci - Instruments77 033706 PDFhitesh_tilalaNo ratings yet
- J.C. Bozier Et Al - A New Supercritical Shock Wave RegimeDocument8 pagesJ.C. Bozier Et Al - A New Supercritical Shock Wave RegimeOkklosNo ratings yet
- Physics ProjectDocument30 pagesPhysics ProjectDeepa JaiswalNo ratings yet
- Theory FtirDocument15 pagesTheory FtirgwachakhanNo ratings yet
- Principles of Nulling and Imaging EllipsometryDocument0 pagesPrinciples of Nulling and Imaging EllipsometryGaurav AcharyaNo ratings yet
- Faraday Rotation NewDocument28 pagesFaraday Rotation NewdrtanilbabuNo ratings yet
- Doppler Characterization For LEO Satellites: Irfan Ali,, Naofal Al-Dhahir,, and John E. HersheyDocument5 pagesDoppler Characterization For LEO Satellites: Irfan Ali,, Naofal Al-Dhahir,, and John E. HersheyhuiodoenNo ratings yet
- Advanced Course Chapter 15 Part 02 AntennasDocument76 pagesAdvanced Course Chapter 15 Part 02 AntennasSampson MikeNo ratings yet
- Physics 262 Lab #4: Interferometer John YamrickDocument8 pagesPhysics 262 Lab #4: Interferometer John YamrickAndrea BonfissutoNo ratings yet
- Polarization Instability in A Twisted Birefringent Optical FiberDocument11 pagesPolarization Instability in A Twisted Birefringent Optical Fibervschein333No ratings yet
- The Doppler Effect: As The Ambulance Travels ForwardsDocument35 pagesThe Doppler Effect: As The Ambulance Travels ForwardsHany ElGezawyNo ratings yet
- 0465 FB 1892452195Document7 pages0465 FB 1892452195Daudi Erasto MlangiNo ratings yet
- Doppler Effect Tutorial 102Document12 pagesDoppler Effect Tutorial 102tinoNo ratings yet
- Reflection Coefficient For Superresonant Scattering: Home Search Collections Journals About Contact Us My IopscienceDocument9 pagesReflection Coefficient For Superresonant Scattering: Home Search Collections Journals About Contact Us My Iopsciencesaikat mitraNo ratings yet
- Relativistic Longitudinal Doppler EffecteditDocument11 pagesRelativistic Longitudinal Doppler EffecteditSinta NuriyahNo ratings yet
- Spin Coherence in Semiconductors: Storage, Transport and Reduced DimensionalityDocument8 pagesSpin Coherence in Semiconductors: Storage, Transport and Reduced DimensionalityMuzamil ShahNo ratings yet
- Speed of Light - WikipediaDocument25 pagesSpeed of Light - WikipediamexcesNo ratings yet
- Rubidium Hyperfine StructureDocument4 pagesRubidium Hyperfine StructureKapila Wijayaratne100% (2)
- Simulated VLBI Images From Relativistic Hydrodynamic Jet ModelsDocument27 pagesSimulated VLBI Images From Relativistic Hydrodynamic Jet ModelsCélio LimaNo ratings yet
- J. Filevich Et Al - Observation of Multiply Ionized Plasmas With Dominant Bound Electron Contribution To The Index of RefractionDocument10 pagesJ. Filevich Et Al - Observation of Multiply Ionized Plasmas With Dominant Bound Electron Contribution To The Index of RefractionOlyvesNo ratings yet
- The Measurement of Absorptivity and Reflectivity: Ministry BF AviationDocument24 pagesThe Measurement of Absorptivity and Reflectivity: Ministry BF AviationCamilo Enrique Monroy CardenasNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 2: Gravitational and Inertial Control, #2From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 2: Gravitational and Inertial Control, #2No ratings yet
- LRL Accelerators, The 184-Inch SynchrocyclotronFrom EverandLRL Accelerators, The 184-Inch SynchrocyclotronNo ratings yet
- Year 9 GeographyDocument2 pagesYear 9 GeographyStephen MceleaveyNo ratings yet
- 8 History Term 212Document10 pages8 History Term 212Stephen MceleaveyNo ratings yet
- 82 Lesson Plan 4Document4 pages82 Lesson Plan 4Stephen MceleaveyNo ratings yet
- T1 Y7 HistoryDocument5 pagesT1 Y7 HistoryStephen MceleaveyNo ratings yet
- Year 7 GeographyDocument2 pagesYear 7 GeographyStephen MceleaveyNo ratings yet
- Block PrintingDocument2 pagesBlock PrintingStephen MceleaveyNo ratings yet
- Year 8 GeographyDocument2 pagesYear 8 GeographyStephen MceleaveyNo ratings yet
- Year 7 Unit of Work Portraits - BODY ADORNMENTDocument3 pagesYear 7 Unit of Work Portraits - BODY ADORNMENTStephen MceleaveyNo ratings yet
- History Yr 7Document5 pagesHistory Yr 7Stephen MceleaveyNo ratings yet
- T1 Y7 History MSDocument5 pagesT1 Y7 History MSStephen MceleaveyNo ratings yet
- AfL Art and Design Unit 6Document13 pagesAfL Art and Design Unit 6Stephen MceleaveyNo ratings yet
- Membership HandbookDocument42 pagesMembership HandbookStephen MceleaveyNo ratings yet
- Music Teacher PSDocument1 pageMusic Teacher PSStephen MceleaveyNo ratings yet
- 00 02 Light AssessmentDocument4 pages00 02 Light AssessmentStephen MceleaveyNo ratings yet
- The Levitating Bunsen Flame Experiment CDocument7 pagesThe Levitating Bunsen Flame Experiment CStephen MceleaveyNo ratings yet
- IB Physics Topic OutlineDocument2 pagesIB Physics Topic OutlineStephen MceleaveyNo ratings yet
- Portraits Power Point PresentationDocument13 pagesPortraits Power Point PresentationStephen MceleaveyNo ratings yet
- Light: Summary SheetsDocument2 pagesLight: Summary SheetsStephen Mceleavey50% (2)
- ks1 English 2018 Reading Paper 1 Reading Answer BookletDocument20 pagesks1 English 2018 Reading Paper 1 Reading Answer BookletStephen MceleaveyNo ratings yet
- GraphPaper Milimetr PDFDocument1 pageGraphPaper Milimetr PDFStephen MceleaveyNo ratings yet
- Vocab For Framing Lesson Objectives and OutcomesDocument1 pageVocab For Framing Lesson Objectives and OutcomesStephen MceleaveyNo ratings yet
- Video Response WorksheetDocument2 pagesVideo Response WorksheetStephen MceleaveyNo ratings yet
- GraphPaper - Milimetr 3 PDFDocument1 pageGraphPaper - Milimetr 3 PDFStephen MceleaveyNo ratings yet
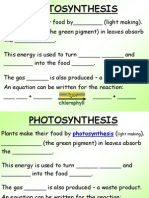
- Photosynthesis Summary ParagraphDocument9 pagesPhotosynthesis Summary ParagraphStephen MceleaveyNo ratings yet
- Category 4 3 2 1: Eye ContactDocument2 pagesCategory 4 3 2 1: Eye ContactStephen MceleaveyNo ratings yet
- TESOL Journal - 2022 - Uludag - Exploring EAP Instructors Evaluation of Classroom Based Integrated EssaysDocument20 pagesTESOL Journal - 2022 - Uludag - Exploring EAP Instructors Evaluation of Classroom Based Integrated EssaysAy IsNo ratings yet
- Kuliah 2 - PA IV - Pengantar Perancangan Bangunan PendidikanDocument20 pagesKuliah 2 - PA IV - Pengantar Perancangan Bangunan PendidikanHusnul MarfuahNo ratings yet
- Pee Question BankDocument9 pagesPee Question BanklavanyaNo ratings yet
- (Worksheet 13.1) - (Power Sharing)Document5 pages(Worksheet 13.1) - (Power Sharing)DeepikaNo ratings yet
- Is 516 Method of Test For Strength of ConcreteDocument25 pagesIs 516 Method of Test For Strength of Concreteselva_65195078% (9)
- E25bmhs 2007Document63 pagesE25bmhs 2007Luis GallardoNo ratings yet
- Aplicación Manual DiasysDocument63 pagesAplicación Manual DiasysbetsabevegaaNo ratings yet
- 2.2 Psychological PerspectiveDocument17 pages2.2 Psychological PerspectiveMaica LagareNo ratings yet
- 18300038, Assignment 1, Bus 411Document5 pages18300038, Assignment 1, Bus 411Md RifatNo ratings yet
- TikTok Article & Questions (PART 1)Document4 pagesTikTok Article & Questions (PART 1)AqeelALTNo ratings yet
- Group 1 - The Alkali Metals Worksheet: 4li(s) + O (G) 2li O(s)Document3 pagesGroup 1 - The Alkali Metals Worksheet: 4li(s) + O (G) 2li O(s)Vaida MatulevičiūtėNo ratings yet
- Apr 2008 EE Board Exam Part1Document1 pageApr 2008 EE Board Exam Part1Bugoy2023No ratings yet
- The Nicoll Highway Collapse PDF FreeDocument140 pagesThe Nicoll Highway Collapse PDF FreeJohn WongNo ratings yet
- Instalment Payment Plan FormDocument1 pageInstalment Payment Plan Formckeat_2No ratings yet
- (Industrial Marketing) : Marketing Strategies Used by Conros Steel Pvt. LTDDocument5 pages(Industrial Marketing) : Marketing Strategies Used by Conros Steel Pvt. LTDpuranpoliNo ratings yet
- Ee8701 - High Voltage Engineering Department of Eee 2020-2021Document40 pagesEe8701 - High Voltage Engineering Department of Eee 2020-2021EEE ConferenceNo ratings yet
- Fleet 400 Fleet 500 Fleet 650: Engine-Driven Welder/GeneratorDocument12 pagesFleet 400 Fleet 500 Fleet 650: Engine-Driven Welder/GeneratorNusantara Tehnik Gemilang SafetyNo ratings yet
- Troubleshooting Case Study: RADULKO Transport: CCNP TSHOOT: Maintaining and Troubleshooting IP NetworksDocument30 pagesTroubleshooting Case Study: RADULKO Transport: CCNP TSHOOT: Maintaining and Troubleshooting IP NetworksAustin SpillerNo ratings yet
- 48V TXT Service Manual PDFDocument192 pages48V TXT Service Manual PDFJim Campbell De Castro100% (3)
- Asus ROG Zephyrus S GX531: 1.what Are The Main Characteristics?Document3 pagesAsus ROG Zephyrus S GX531: 1.what Are The Main Characteristics?mihaelahristeaNo ratings yet
- Sample Paper VIII 2023-2024Document455 pagesSample Paper VIII 2023-2024RoxtteNo ratings yet
- Drug Calculations Practice NCLEX Questions (100+Document2 pagesDrug Calculations Practice NCLEX Questions (100+obedidomNo ratings yet
- GT Lube Oil FlushingDocument11 pagesGT Lube Oil Flushingshubham raj bhawsarNo ratings yet
- Header Specification: Mplab Icd 2Document12 pagesHeader Specification: Mplab Icd 2knoppix2008No ratings yet
- PG 26 W FACTOR BPVC-I - 2015-068-069Document2 pagesPG 26 W FACTOR BPVC-I - 2015-068-069Eka WahyuNo ratings yet
- Corporate PPT Template 20Document10 pagesCorporate PPT Template 20Mustafa RahmanNo ratings yet
- 1.introduction To Health Education & Promotion (1) .Document44 pages1.introduction To Health Education & Promotion (1) .Nebiyu NegaNo ratings yet
- Trans-Amf Eng Man v44Document84 pagesTrans-Amf Eng Man v44AyeminThetNo ratings yet