Download as pdf or txt
You might also like
- Troubleshooting: LunarDocument54 pagesTroubleshooting: Lunarsmm100% (1)
- Black Drama Results: Act 1, Scene 1: Imprisonment of A ShadowDocument15 pagesBlack Drama Results: Act 1, Scene 1: Imprisonment of A Shadowjohn7tago100% (2)
- Troubleshooting Pulse Width ModulatedDocument3 pagesTroubleshooting Pulse Width ModulatedYuri Condori huamanNo ratings yet
- Chapter Electric Fuel Injection SystemDocument92 pagesChapter Electric Fuel Injection Systemcamionetanissanz20No ratings yet
- Electrical M07 Sensors enDocument28 pagesElectrical M07 Sensors enFredy Manrique AstoNo ratings yet
- Use of The Fluke 105B Scopemeter On The Farm: SafetyDocument7 pagesUse of The Fluke 105B Scopemeter On The Farm: SafetyBashir MtwaklNo ratings yet
- How Can I Make Loop Check For Pressure Transmitter and Temperature TransmitterDocument11 pagesHow Can I Make Loop Check For Pressure Transmitter and Temperature Transmittersushant_jhawer100% (1)
- Troubleshoot Transient Voltages in Variable Frequency Drives - FlukeDocument5 pagesTroubleshoot Transient Voltages in Variable Frequency Drives - FlukeAsistencia Técnica JLFNo ratings yet
- Linetroll 110T R: User ManualDocument16 pagesLinetroll 110T R: User ManualRodriigo SaaNo ratings yet
- 1440 - 2265 - 2266 Codes Sensor TestDocument8 pages1440 - 2265 - 2266 Codes Sensor TestDibas BaniyaNo ratings yet
- Testing For A Speedometer Signal12 - 5 - 17 1Document2 pagesTesting For A Speedometer Signal12 - 5 - 17 1saint saulNo ratings yet
- Experiment 1: Introduction To Electronics InstrumentationsDocument17 pagesExperiment 1: Introduction To Electronics InstrumentationsSharifah Syed HamzahNo ratings yet
- 1 Electric Injection System - Chery Tiggo T11Document87 pages1 Electric Injection System - Chery Tiggo T11limadacarlosNo ratings yet
- 970901B Dual Pulse Fidility CHKDocument4 pages970901B Dual Pulse Fidility CHKsyed jeelani ahmedNo ratings yet
- TA2100 Toxic SIL2 01-2640 Arsine 0.00-1.00ppm PDFDocument41 pagesTA2100 Toxic SIL2 01-2640 Arsine 0.00-1.00ppm PDFGilman Robert Montalvo100% (1)
- Sensor Signal (PWM) - Test: TroubleshootingDocument9 pagesSensor Signal (PWM) - Test: TroubleshootingOsvaldo UrbanoNo ratings yet
- Cummins QSB6.7 and QSB4.5 With CM850 ECM - Components TestingDocument15 pagesCummins QSB6.7 and QSB4.5 With CM850 ECM - Components TestingAnders Hedlöf100% (6)
- Manual de Serviço Injeção EletrônicaDocument87 pagesManual de Serviço Injeção EletrônicaMarcos MedradoNo ratings yet
- BEEE - LAB Manual-Intro - Part 2Document6 pagesBEEE - LAB Manual-Intro - Part 2Anant UpadhiyayNo ratings yet
- Chequeo de Sensores AutomovilDocument7 pagesChequeo de Sensores AutomovilBryan RzNo ratings yet
- Aplicacion Variadores de Velocidad Fluke 289Document5 pagesAplicacion Variadores de Velocidad Fluke 289mci_ingNo ratings yet
- MAG500-6000 Installation & Fault FindingDocument21 pagesMAG500-6000 Installation & Fault FindinglquickfallNo ratings yet
- Sensor Signal (Analog, Active) - Test: TroubleshootingDocument5 pagesSensor Signal (Analog, Active) - Test: TroubleshootingcristianNo ratings yet
- Lab Manual 1Document6 pagesLab Manual 1monisha kunjumonNo ratings yet
- Codigo 1079 - 3Document4 pagesCodigo 1079 - 3ericNo ratings yet
- An Freq MeasurementDocument14 pagesAn Freq MeasurementfarcasiunNo ratings yet
- Firstlook Manual SenxDocument22 pagesFirstlook Manual SenxschraeubleNo ratings yet
- CTER Polarity TestDocument30 pagesCTER Polarity TestforeverjaiNo ratings yet
- 4bz 3412 Gensets PeecDocument7 pages4bz 3412 Gensets PeecSameh Rashad Ahmed67% (3)
- Mc31a Rev5Document33 pagesMc31a Rev5sanju939No ratings yet
- Experiment No. 3 Testing A TP Sensor Using An Oscilloscope: ObjectivesDocument8 pagesExperiment No. 3 Testing A TP Sensor Using An Oscilloscope: ObjectivesMustafa AliNo ratings yet
- HHO PWM55 v1.8 +EFIEv1.3+LCD1.1Document10 pagesHHO PWM55 v1.8 +EFIEv1.3+LCD1.1هيثم خماش0% (1)
- Control Room Questions and AnswersDocument15 pagesControl Room Questions and AnswersJêmš NavikNo ratings yet
- Signal Analysis - Cam Position SensorDocument21 pagesSignal Analysis - Cam Position SensorIchsan KurniawanNo ratings yet
- Digital Efie InstructionsDocument5 pagesDigital Efie InstructionsIwan SetiawanNo ratings yet
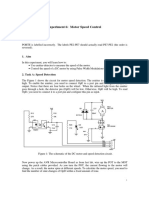
- Experiment 6: Motor Speed Control: ErratumDocument5 pagesExperiment 6: Motor Speed Control: ErratumBambang PrasetyoNo ratings yet
- CISE 204 Digital System Design Lab Manual PDFDocument44 pagesCISE 204 Digital System Design Lab Manual PDFEng-Mohammed KayedNo ratings yet
- Techtalk Sep 2006Document1 pageTechtalk Sep 2006ภูเก็ต เป็นเกาะNo ratings yet
- Better Ways To Troubleshoot Automation and Process Control Loops - pd8fDocument3 pagesBetter Ways To Troubleshoot Automation and Process Control Loops - pd8fNGASSAKI ATONGUI Christ HubertNo ratings yet
- EmiDocument5 pagesEmidirenNo ratings yet
- Time SND Speed Circuit TestDocument7 pagesTime SND Speed Circuit TestbejoythomasNo ratings yet
- EAGLE DuplexerDocument3 pagesEAGLE DuplexerrujanacNo ratings yet
- PWM Sensor Signal TestDocument8 pagesPWM Sensor Signal Testabdelganiabdelrhman26No ratings yet
- Поиск 1Document6 pagesПоиск 1suriantoNo ratings yet
- E2em003 ReportDocument174 pagesE2em003 ReportLumisense TechnologiesNo ratings yet
- Sensor Signal (Analog, Active) - Test: Localización y Solución de ProblemasDocument7 pagesSensor Signal (Analog, Active) - Test: Localización y Solución de ProblemasCEVegaONo ratings yet
- Engine Speed/Timing Sensor Circuit - Test: TroubleshootingDocument13 pagesEngine Speed/Timing Sensor Circuit - Test: TroubleshootingRodrigo Herrera GodosNo ratings yet
- WPL 26 Shock MonitoringDocument16 pagesWPL 26 Shock MonitoringAhmed El-ShafeiNo ratings yet
- Pull Up VoltageDocument4 pagesPull Up VoltageElba Rivera TelloNo ratings yet
- Electronics Lab 1Document18 pagesElectronics Lab 1Sheraz HassanNo ratings yet
- Speed Control - TestDocument3 pagesSpeed Control - Testbenjir shuvoNo ratings yet
- Catalogue of SimulatorDocument9 pagesCatalogue of Simulatorgire_3pich2005No ratings yet
- Lecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterDocument8 pagesLecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterHuzaifa RehanNo ratings yet
- NTPC Thermal Power Plant Training ReportDocument63 pagesNTPC Thermal Power Plant Training ReportTARUN KUMARNo ratings yet
- 1SP54 0e PDFDocument6 pages1SP54 0e PDFCông QuýNo ratings yet
- ECA-II Manual CompleteDocument100 pagesECA-II Manual CompleteRaheel RaufNo ratings yet
- Throttle Position Sensor Circuit TestDocument8 pagesThrottle Position Sensor Circuit TestDaniel AmanorNo ratings yet
- Vehicle Sensors WiringDocument8 pagesVehicle Sensors WiringAudrick Russell100% (1)
- LineTroll 110eu Userguide March 2007Document17 pagesLineTroll 110eu Userguide March 2007AhmadHanafiNo ratings yet
- E5CC Quick Start Guide enDocument28 pagesE5CC Quick Start Guide enrmorenodx4587No ratings yet
- UGEB2362 Course Outline 2023-24Document5 pagesUGEB2362 Course Outline 2023-24Suki PunNo ratings yet
- Edma Lesson PlanDocument6 pagesEdma Lesson Planapi-662165409No ratings yet
- Transmission Structures and Foundations:: CourseDocument8 pagesTransmission Structures and Foundations:: CoursejulianobiancoNo ratings yet
- Sensitive PracticeDocument122 pagesSensitive PracticeFederica FarfallaNo ratings yet
- Kenya Institute of Business and Counselling StudiesDocument16 pagesKenya Institute of Business and Counselling StudiesEdwine Jeremiah ONo ratings yet
- 2july Grade 1 TestDocument12 pages2july Grade 1 TestEron Roi Centina-gacutanNo ratings yet
- Department of Musicology Faculty of MusicDocument196 pagesDepartment of Musicology Faculty of MusicBojan MarjanovicNo ratings yet
- Guided Reading Lesson PlanDocument4 pagesGuided Reading Lesson Planapi-311848745No ratings yet
- Teaching As A ProfessionDocument5 pagesTeaching As A Professionipinloju temitopeNo ratings yet
- Case Study CCTV BuildingDocument11 pagesCase Study CCTV BuildingChendra Ling LingNo ratings yet
- Organisational Analysis of Hero Motocorp and Eicher Motors: Group 9Document7 pagesOrganisational Analysis of Hero Motocorp and Eicher Motors: Group 9Rupanshi JaiswalNo ratings yet
- Table of Specifications Grade 5Document3 pagesTable of Specifications Grade 5rene balayoNo ratings yet
- Department of Business Administration: Submitted ToDocument15 pagesDepartment of Business Administration: Submitted Topinky271994No ratings yet
- Variables, Validity & ReliabilityDocument42 pagesVariables, Validity & ReliabilityNsem Rao100% (1)
- Medications For Neonatal Resuscitation Program 2011 Canadian AdaptationDocument1 pageMedications For Neonatal Resuscitation Program 2011 Canadian AdaptationrubymayNo ratings yet
- Chapter 7-Managing Quality: 07/20/2022 1 Arsi University Om Mba-2020Document33 pagesChapter 7-Managing Quality: 07/20/2022 1 Arsi University Om Mba-2020temesgen yohannesNo ratings yet
- 2018-09-01 Classic Land RoverDocument100 pages2018-09-01 Classic Land RovergufffNo ratings yet
- A30 CismDocument14 pagesA30 CismRohan SharmaNo ratings yet
- Submarine Cable Installation ContractorsDocument19 pagesSubmarine Cable Installation Contractorswiji_thukulNo ratings yet
- 207 Money Saving FixesDocument149 pages207 Money Saving FixesCarmen Elena Nastasă100% (3)
- VBA Water 6.09 Temperature Pressure Relief Valve Drain LinesDocument2 pagesVBA Water 6.09 Temperature Pressure Relief Valve Drain LinesgaryNo ratings yet
- Walter2010 PDFDocument25 pagesWalter2010 PDFIpuk WidayantiNo ratings yet
- Art AppreciationDocument10 pagesArt AppreciationJasmine EnriquezNo ratings yet
- Feasibility Study Project Proposal RequirementsDocument2 pagesFeasibility Study Project Proposal RequirementsErick NgosiaNo ratings yet
- Complete Using ConditionalsDocument2 pagesComplete Using ConditionalsicecrisNo ratings yet
- Job Opportunities Sydney 7082017Document10 pagesJob Opportunities Sydney 7082017Dianita CorreaNo ratings yet
- Homeopathy For Intestinal Parasites and WormsDocument4 pagesHomeopathy For Intestinal Parasites and WormsWazhul QamarNo ratings yet
- BiossDocument11 pagesBiossPriyanka SharmaNo ratings yet
- NSO Set-C Answer KeysDocument12 pagesNSO Set-C Answer KeysMota Chashma100% (1)