Download as pdf or txt
You might also like
- 194-323 Ford WSG1068 6.8L Industrial Engine Service Manual (Generac OE7083) (02-2002)Document358 pages194-323 Ford WSG1068 6.8L Industrial Engine Service Manual (Generac OE7083) (02-2002)Miguel Sotelo100% (2)
- Yzf r1 ManualDocument457 pagesYzf r1 Manualmartin8762life100% (28)
- 3515 Chevrolet Sprint L3-61-1.0 ManualDocument916 pages3515 Chevrolet Sprint L3-61-1.0 ManualOctavio Ramirez100% (2)
- Isuzu Engines 6HK1 M. Serv.Document222 pagesIsuzu Engines 6HK1 M. Serv.Miguel100% (2)
- Design & Performance Analysis of LSM For EMALS.Document52 pagesDesign & Performance Analysis of LSM For EMALS.dabrevipulNo ratings yet
- .archivetempERF2019 0045Document12 pages.archivetempERF2019 0045Antony PattyNo ratings yet
- Valmet612DSL PDFDocument94 pagesValmet612DSL PDFSCANIA100% (1)
- 04 D155 EngineDocument32 pages04 D155 Engineghitacrainic100% (5)
- Electric Propulsion System Characterization Through ExperimentsDocument9 pagesElectric Propulsion System Characterization Through Experiments呂文祺No ratings yet
- FlightcontrolactuatiomDocument6 pagesFlightcontrolactuatiomcbnagaraju051No ratings yet
- 2 - Propeller Thrust and Drag in Forward FlightDocument7 pages2 - Propeller Thrust and Drag in Forward FlightMarko PoloNo ratings yet
- Impact of Electric Taxiing On Hybrid-Electric Aircraft SizingDocument10 pagesImpact of Electric Taxiing On Hybrid-Electric Aircraft SizingWilliam Jaldin CorralesNo ratings yet
- ECCOMAS Paper FinalDocument13 pagesECCOMAS Paper FinalsarhlisahraNo ratings yet
- Model Based Design and Experimental Validation of Electro-Mechanic Actuator Systems For A Nose Landing GearDocument10 pagesModel Based Design and Experimental Validation of Electro-Mechanic Actuator Systems For A Nose Landing GearmailrahultanwarNo ratings yet
- Active Front-End Rectifier Modelling Using Dynamic Phasors For More-Electric Aircraft Applications - IET - V5Document24 pagesActive Front-End Rectifier Modelling Using Dynamic Phasors For More-Electric Aircraft Applications - IET - V5Nuradin JemalNo ratings yet
- Analysis and Validation of A Real-Time AC Drive Simulator, 2004.Document10 pagesAnalysis and Validation of A Real-Time AC Drive Simulator, 2004.Ali H. NumanNo ratings yet
- Brushless DC Motor Characterisation and Selection For A Fixed Wing UAVDocument6 pagesBrushless DC Motor Characterisation and Selection For A Fixed Wing UAVbaleci mtlczNo ratings yet
- Development of A Useful Wind Turbine Emulator Based On Permanent Magnet DC MotorDocument5 pagesDevelopment of A Useful Wind Turbine Emulator Based On Permanent Magnet DC MotorOscar LopezNo ratings yet
- Review of High Speed Electrical Machines in Gas Turbine Electrical Power GenerationDocument9 pagesReview of High Speed Electrical Machines in Gas Turbine Electrical Power GenerationicaanmpzNo ratings yet
- Milutinovic Et Al. 2014 PDFDocument10 pagesMilutinovic Et Al. 2014 PDFAmar FayyadNo ratings yet
- Electromagnetic UAV Launch SystemDocument4 pagesElectromagnetic UAV Launch SystemEckyThumpNo ratings yet
- Tec 2018 2867906Document9 pagesTec 2018 2867906rasoolNo ratings yet
- Control Engineering Practice: Michael Erhard, Hans StrauchDocument14 pagesControl Engineering Practice: Michael Erhard, Hans StrauchSka dooshNo ratings yet
- Electric Power Systems ResearchDocument13 pagesElectric Power Systems ResearchAmit sahaNo ratings yet
- High-Torque Motor For A Gearless Electromechanical Actuator: F.R. Ismagilov V.E. Vavilov I.F. SayakhovDocument5 pagesHigh-Torque Motor For A Gearless Electromechanical Actuator: F.R. Ismagilov V.E. Vavilov I.F. SayakhovMano DanoNo ratings yet
- A Guide To Unmanned Aerial Vehicles Performance AnDocument15 pagesA Guide To Unmanned Aerial Vehicles Performance AnGiannina BassiNo ratings yet
- Billinton 2004Document6 pagesBillinton 2004Shijil JaisonNo ratings yet
- The Journal of Engineering - 2023 - Zountouridou - A Guide To Unmanned Aerial Vehicles Performance Analysis The MQ 9Document15 pagesThe Journal of Engineering - 2023 - Zountouridou - A Guide To Unmanned Aerial Vehicles Performance Analysis The MQ 9zay107No ratings yet
- 18 OGrigoreMuler RRST-2-2023 8p 224-231Document8 pages18 OGrigoreMuler RRST-2-2023 8p 224-231Tavi GrigNo ratings yet
- Performance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofDocument6 pagesPerformance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofhanxinNo ratings yet
- Fundamental Studies of Variable-Voltage Hybrid-Electric PowertrainsDocument21 pagesFundamental Studies of Variable-Voltage Hybrid-Electric PowertrainsOliver RailaNo ratings yet
- Self Tuning Control of Wind Turbine Using Neural Network IdentifierDocument13 pagesSelf Tuning Control of Wind Turbine Using Neural Network IdentifierAlla SapronovaNo ratings yet
- Analytical and Experimental Evaluation of A WECS Based On A Cage Induction Generator Fed by A Matrix ConverterDocument12 pagesAnalytical and Experimental Evaluation of A WECS Based On A Cage Induction Generator Fed by A Matrix ConverterVipul PanchalNo ratings yet
- Wind Tunnel Performance Tests of The Propellers WiDocument18 pagesWind Tunnel Performance Tests of The Propellers WitxcherbinhNo ratings yet
- Studying Ship Electric Energy Systems With Shaft GeneratorDocument7 pagesStudying Ship Electric Energy Systems With Shaft GeneratorAbburi KarthikNo ratings yet
- Fixed-Speed Wind-Generator and Wind-Park Modeling For Transient Stability StudiesDocument7 pagesFixed-Speed Wind-Generator and Wind-Park Modeling For Transient Stability StudiesVenkatesh KollisettiNo ratings yet
- Zhang - A Novel Dynamic Wind Farm Wake Model Based On Deep LearningDocument13 pagesZhang - A Novel Dynamic Wind Farm Wake Model Based On Deep LearningbakidokiNo ratings yet
- Floquet Modal Analysis of A Teetered-Rotor Wind Turbine: Karl StolDocument8 pagesFloquet Modal Analysis of A Teetered-Rotor Wind Turbine: Karl StolAnonymous UoHUagNo ratings yet
- Energies 12 01907Document25 pagesEnergies 12 01907Sesetti GourisankarNo ratings yet
- Propulsão ElétricaDocument14 pagesPropulsão ElétricaSergioNo ratings yet
- Applsci 11 11083 v2Document23 pagesApplsci 11 11083 v2R-51 -Sagar KPNo ratings yet
- Motor Open Circuit ControlDocument12 pagesMotor Open Circuit Controlzy lNo ratings yet
- General Diesel Turbines: A Algorithm AccurateDocument7 pagesGeneral Diesel Turbines: A Algorithm AccurateMelissa HolmesNo ratings yet
- Large Wind Power Plants Modeling TechniquesDocument7 pagesLarge Wind Power Plants Modeling Techniquesmohamed berririNo ratings yet
- Control Scheme For A Stand-Alone Wind Energy Conversion SystemDocument8 pagesControl Scheme For A Stand-Alone Wind Energy Conversion SystemKhaja SameeduddinNo ratings yet
- Beyond The: More Electric AircraftDocument6 pagesBeyond The: More Electric AircraftJeevan KalraNo ratings yet
- Nakayama 2019Document11 pagesNakayama 2019Harsh PatilNo ratings yet
- A Nine-Switch-Converter-Based Integrated Motor Drive and Battery Charger System For EVs Using Symmetrical Six-Phase MachinesDocument10 pagesA Nine-Switch-Converter-Based Integrated Motor Drive and Battery Charger System For EVs Using Symmetrical Six-Phase MachinesMohamed DiabNo ratings yet
- Ijream Amet 0001Document7 pagesIjream Amet 0001DeepanNo ratings yet
- Toward Controlled Flight of The Ionocraft A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving PartsDocument7 pagesToward Controlled Flight of The Ionocraft A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving PartsFrank ToralbaNo ratings yet
- State Space Model of Grid Connected Inverters Under Current Control ModeDocument10 pagesState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiNo ratings yet
- Dynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced ConverterDocument11 pagesDynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced Convertershahin mirzaeiNo ratings yet
- AerospaceDocument19 pagesAerospacehassanNo ratings yet
- 10.1109 Repe50851.2020.9253880Document6 pages10.1109 Repe50851.2020.9253880amin.bigdelii1375No ratings yet
- Journal Jpe 15-5 1658292190Document12 pagesJournal Jpe 15-5 1658292190Nuri KaraoğlanNo ratings yet
- Optimal Control of Matrix-Converter-Based WECS For Performance Enhancement and Efficiency OptimizationDocument10 pagesOptimal Control of Matrix-Converter-Based WECS For Performance Enhancement and Efficiency Optimizationkrishkrishna007No ratings yet
- Power Management of SUASDocument11 pagesPower Management of SUASosamagillaniNo ratings yet
- PSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralDocument12 pagesPSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralfvijayamiNo ratings yet
- Characterization and Modeling of Brushless DC Motors and Electronic Speed Controllers With A DynamometerDocument19 pagesCharacterization and Modeling of Brushless DC Motors and Electronic Speed Controllers With A DynamometerOliver RailaNo ratings yet
- Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionDocument10 pagesSpace Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionSHUBHAM DABRALNo ratings yet
- Simulation Model of A Military HEV With A Highly Redundant ArchitectureDocument10 pagesSimulation Model of A Military HEV With A Highly Redundant ArchitectureSekwah HawkesNo ratings yet
- Modeling and Simulation of An Emulator of A Wind Turbine Speed Using Vector Control of A Three-Phase Induction MotorDocument6 pagesModeling and Simulation of An Emulator of A Wind Turbine Speed Using Vector Control of A Three-Phase Induction MotortitanNo ratings yet
- Cardenas (2001)Document11 pagesCardenas (2001)jhonatanNo ratings yet
- Development of A Dynamic Propulsion Model For Electric UAVsDocument13 pagesDevelopment of A Dynamic Propulsion Model For Electric UAVs정종욱No ratings yet
- Research Proposal Template - Copy1Document29 pagesResearch Proposal Template - Copy1millionNo ratings yet
- Chat_1693320100822Document2 pagesChat_1693320100822millionNo ratings yet
- Development of Mathematical Model and Speed Control of BLDC MotorDocument10 pagesDevelopment of Mathematical Model and Speed Control of BLDC MotormillionNo ratings yet
- ResumeDocument3 pagesResumemillionNo ratings yet
- Chat 169010738589update7Document14 pagesChat 169010738589update7millionNo ratings yet
- Cover LetterDocument2 pagesCover LettermillionNo ratings yet
- Selam - Teklay Gebreslassie - Resume - 03-09-2023-09-21-24Document2 pagesSelam - Teklay Gebreslassie - Resume - 03-09-2023-09-21-24millionNo ratings yet
- Modeling and Dynamic Simulation of Permanent Magnet Brushless DC Motor (PMBLDCM) DrivesDocument2 pagesModeling and Dynamic Simulation of Permanent Magnet Brushless DC Motor (PMBLDCM) DrivesmillionNo ratings yet
- BearingsDocument2 pagesBearingsmillionNo ratings yet
- The Mathematical Model of A Brushless DC Motor: 2.1 Dynamic Equations of BLDC Motors in Vector SpaceDocument12 pagesThe Mathematical Model of A Brushless DC Motor: 2.1 Dynamic Equations of BLDC Motors in Vector SpacemillionNo ratings yet
- SpaDocument5 pagesSpamillionNo ratings yet
- Full Text 01Document58 pagesFull Text 01millionNo ratings yet
- 4 6051081781547897086tgsDocument1 page4 6051081781547897086tgsmillionNo ratings yet
- ErrdkDocument4 pagesErrdkmillionNo ratings yet
- OP-AMP Basics: Vout VinDocument3 pagesOP-AMP Basics: Vout VinmillionNo ratings yet
- By: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CDocument21 pagesBy: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CmillionNo ratings yet
- Fault Analysis: Kibrom GDocument37 pagesFault Analysis: Kibrom Gmillion100% (1)
- Chapter 2Document114 pagesChapter 2millionNo ratings yet
- Computer Architecture and Organization: Adigrat University Electrical and Computer Engineering Dep'tDocument35 pagesComputer Architecture and Organization: Adigrat University Electrical and Computer Engineering Dep'tmillionNo ratings yet
- Chapter One Introduction To Computer Architecture and OrganizationDocument38 pagesChapter One Introduction To Computer Architecture and OrganizationmillionNo ratings yet
- Power System Stability: Chapter-FourDocument20 pagesPower System Stability: Chapter-FourmillionNo ratings yet
- Introduction To Power Systems Chapter-2 Representation of Power System ComponentsDocument69 pagesIntroduction To Power Systems Chapter-2 Representation of Power System ComponentsmillionNo ratings yet
- Z 50 Murano L IntroductionDocument72 pagesZ 50 Murano L Introductionracibe01100% (1)
- Moving Towards Cleaner FuelsDocument16 pagesMoving Towards Cleaner FuelsEnviro_PakNo ratings yet
- Governing System, RSE & TG ExpansionsDocument40 pagesGoverning System, RSE & TG Expansionssaravan1891100% (3)
- Mantenimiento QSX 15Document71 pagesMantenimiento QSX 15Wilfredo Gaince Parada100% (1)
- Section 2.16 - Life Saving Appliances Maintenance. Maintenance Code N - 1 Month Components Working DescriptionDocument10 pagesSection 2.16 - Life Saving Appliances Maintenance. Maintenance Code N - 1 Month Components Working DescriptionRochmat AdityaNo ratings yet
- 1GR FE LubricationDocument19 pages1GR FE LubricationJesus LayaNo ratings yet
- Mo 84 K 32Document119 pagesMo 84 K 32cuculeskiNo ratings yet
- 03 - Camshaft Bearings - RemoveDocument3 pages03 - Camshaft Bearings - RemoveNimNo ratings yet
- 04 Turbo PDFDocument26 pages04 Turbo PDFFabioMacielNo ratings yet
- Express Limited Warranty: FORM 6315 First EditionDocument2 pagesExpress Limited Warranty: FORM 6315 First EditionLei LiNo ratings yet
- 5.1. Carburetors and Their SystemsDocument48 pages5.1. Carburetors and Their SystemsGODNo ratings yet
- 1, Generator, AGC275SP-Specification - UnlockedDocument4 pages1, Generator, AGC275SP-Specification - Unlockedชัยพร จันทร์ดีNo ratings yet
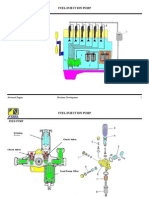
- 4fuel Injection PumpDocument9 pages4fuel Injection PumpJoko Sukariono100% (2)
- 01-1 On Board Diagnostic Multiport Fuel Injection PDFDocument366 pages01-1 On Board Diagnostic Multiport Fuel Injection PDFmefisto06cNo ratings yet
- Exercise 5 PDFDocument11 pagesExercise 5 PDFErica AbelardoNo ratings yet
- Fuel System InspectDocument8 pagesFuel System InspectsxturboNo ratings yet
- 1-IC Engine Lecture I History-ConstructionDocument53 pages1-IC Engine Lecture I History-ConstructionEmanuel ByanNo ratings yet
- IMES Brochure 2010 04Document7 pagesIMES Brochure 2010 04Jose Luis RattiaNo ratings yet
- Air India DelhiDocument28 pagesAir India DelhiGAURAV SINGHNo ratings yet
- RAM 70B Actualizada, 2013Document8 pagesRAM 70B Actualizada, 2013kevin armando martinez esparzaNo ratings yet
- Ice Case StudyDocument12 pagesIce Case Studyqhairul shafiqNo ratings yet
- 55ax ManualDocument24 pages55ax ManualJohn Anthony DreweNo ratings yet
- Adobe Scan 17 Apr 2023Document8 pagesAdobe Scan 17 Apr 2023Rudransh TripathiNo ratings yet
- Jackleg WebDocument1 pageJackleg WebNgười Chiến Sĩ ẤyNo ratings yet