Download as pdf or txt
You might also like
- PCA Project Advanced StatisticsDocument24 pagesPCA Project Advanced StatisticsAnkit Sharma67% (3)
- G7.M1.v3 Teacher EditionDocument224 pagesG7.M1.v3 Teacher EditionTuyếnĐặng67% (3)
- Explanation of Simplex MethodDocument3 pagesExplanation of Simplex MethodJoshua de JesusNo ratings yet
- Week No. Topics Date: Mathematics Grade-9Document3 pagesWeek No. Topics Date: Mathematics Grade-9Maita Jane ManzanillaNo ratings yet
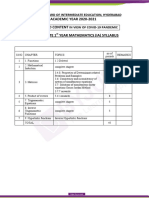
- ACADEMIC YEAR 2020-2021 30% Deleted Content Intermediate 1 Year Mathematics (Ia) SyllabusDocument2 pagesACADEMIC YEAR 2020-2021 30% Deleted Content Intermediate 1 Year Mathematics (Ia) SyllabusAbhiNo ratings yet
- Algorithmic Thinking and Matlab in Computational Materials ScienceDocument13 pagesAlgorithmic Thinking and Matlab in Computational Materials ScienceTygerYashanshuNo ratings yet
- 26 Making DecisionsDocument31 pages26 Making DecisionsianNo ratings yet
- Chapter 5A-Matrices (2021.11) - Clip 1Document11 pagesChapter 5A-Matrices (2021.11) - Clip 1Trung Võ Lê MinhNo ratings yet
- 18 Sum ProductDocument22 pages18 Sum ProductianNo ratings yet
- Algebra 1Document2 pagesAlgebra 1Ammar khanNo ratings yet
- Simultaneous Equations HSC QuestionsDocument8 pagesSimultaneous Equations HSC QuestionsStuNo ratings yet
- 2 - Ijpast 512 V16N1.170230601Document13 pages2 - Ijpast 512 V16N1.170230601Ahmed FenneurNo ratings yet
- 21 Efficient Inference A K-MeansDocument32 pages21 Efficient Inference A K-MeansianNo ratings yet
- MFCS Course File Cse (A)Document5 pagesMFCS Course File Cse (A)ZainaZakiNo ratings yet
- 3 6 PDFDocument2 pages3 6 PDFariel brightNo ratings yet
- Nonlinear Models and Problems in Applied Sciences From Differential Quadrature To Generalized Collocation Met HodsDocument22 pagesNonlinear Models and Problems in Applied Sciences From Differential Quadrature To Generalized Collocation Met HodsOktavia SiahaanNo ratings yet
- The Uncertainty Analysis in Linear and Nonlinear Regression Revisited Application To Concrete Strength EstimationDocument26 pagesThe Uncertainty Analysis in Linear and Nonlinear Regression Revisited Application To Concrete Strength EstimationStanislav StanevNo ratings yet
- YEAR 10 MATHEMATICS (Mainstream Course)Document13 pagesYEAR 10 MATHEMATICS (Mainstream Course)Ralph Rezin MooreNo ratings yet
- Jac M 189861710880200Document14 pagesJac M 189861710880200Ahmed El KhalfiNo ratings yet
- 4th Tos Math7 New FormatDocument2 pages4th Tos Math7 New FormatAnnie Rose Lucinisio - PeraltaNo ratings yet
- 15 Exponential FamiliesDocument33 pages15 Exponential Familiesirpower1375No ratings yet
- Engineering Mechanics Problems Group Work 3Document6 pagesEngineering Mechanics Problems Group Work 3Gokul Manju SanthoshNo ratings yet
- Guide To Maths For ScientistsDocument67 pagesGuide To Maths For ScientistsWisdom PhanganNo ratings yet
- IImanual 2018Document130 pagesIImanual 2018oliverjohnboydNo ratings yet
- Assignment On Business Mathematics: TH ST NDDocument1 pageAssignment On Business Mathematics: TH ST NDNaimul Islam NaimNo ratings yet
- MathDocument10 pagesMathapi-257167263No ratings yet
- 2020 Ha MK Msi Ijmr-2020-91-20-27Document9 pages2020 Ha MK Msi Ijmr-2020-91-20-27Sudipa ChauhanNo ratings yet
- Navodaya Vidyalaya Samiti, NoidaDocument8 pagesNavodaya Vidyalaya Samiti, Noida9A RN10 Harmandeep SinghNo ratings yet
- Gujarat Technological University Computer Engineering (07), Information Technology (16) & Information & Communication TechnologyDocument3 pagesGujarat Technological University Computer Engineering (07), Information Technology (16) & Information & Communication TechnologyavNo ratings yet
- V1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsDocument33 pagesV1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsThyago OliveiraNo ratings yet
- V1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsDocument33 pagesV1.3: A Toolbox For Geostatistical Modelling in Python: GstoolsThyago OliveiraNo ratings yet
- U2 Engineering MathsDocument6 pagesU2 Engineering Mathsemy aliNo ratings yet
- Midsem I 31 03 2023Document12 pagesMidsem I 31 03 2023MUSHTAQ AHAMEDNo ratings yet
- Liao-Ma2020_Article_AnExplicitConstructionOfTheDimDocument33 pagesLiao-Ma2020_Article_AnExplicitConstructionOfTheDimJuan P HDNo ratings yet
- MTH JSS 3 SchemeDocument1 pageMTH JSS 3 SchemePatrick Chukwunonso A.No ratings yet
- ELMNET TapchiDocument12 pagesELMNET TapchiNguyễn QuânNo ratings yet
- Artikel InternasionalDocument7 pagesArtikel InternasionalAnita SariNo ratings yet
- LP III Lab ManualDocument8 pagesLP III Lab Manualsaket bharati100% (1)
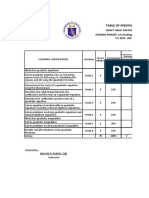
- Sample of Table of SpecificationDocument2 pagesSample of Table of Specificationprettycry barillaNo ratings yet
- Isogeometric Analysis On V-Reps: First Results: SciencedirectDocument27 pagesIsogeometric Analysis On V-Reps: First Results: SciencedirectJorge Luis Garcia ZuñigaNo ratings yet
- Math SaoDocument11 pagesMath Saoapi-462525045No ratings yet
- Subject: Elementary Statistics and Probability Second Semester, School Year 2020-2021 Final ExaminationDocument1 pageSubject: Elementary Statistics and Probability Second Semester, School Year 2020-2021 Final ExaminationCheenee Rose AgbuyaNo ratings yet
- Metric Learning and Manifolds: Preserving The Intrinsic GeometryDocument37 pagesMetric Learning and Manifolds: Preserving The Intrinsic GeometryLeticia RamirezNo ratings yet
- Parallel AlgorithmsDocument3 pagesParallel AlgorithmsEr Umesh ThoriyaNo ratings yet
- TOS in Gen MathDocument3 pagesTOS in Gen MathOje Gitanes NalabagsNo ratings yet
- 19 Example Topic ModelsDocument30 pages19 Example Topic Modelsirpower1375No ratings yet
- Objective Level ResultsDocument2 pagesObjective Level Resultsapi-431340065No ratings yet
- An Elementary Introduction To Information GeometryDocument63 pagesAn Elementary Introduction To Information GeometryREGI PRONo ratings yet
- Tungban Probabilistic ML 2021 - Lecture09Document46 pagesTungban Probabilistic ML 2021 - Lecture09irpower1375No ratings yet
- Course Assessment Strategy Reference Practice BooklistDocument4 pagesCourse Assessment Strategy Reference Practice BooklistAbdul HamidNo ratings yet
- Department of Collegiate and Technical EducationDocument11 pagesDepartment of Collegiate and Technical EducationHarsha SamagaraNo ratings yet
- Finite Elements in Geotechnical Engineering: A (Very) Short IntroductionDocument21 pagesFinite Elements in Geotechnical Engineering: A (Very) Short IntroductionFelipe Ignacio Alarcon ArayaNo ratings yet
- 17 Factor GraphsDocument27 pages17 Factor Graphsirpower1375No ratings yet
- 0606 Teaching PlanDocument9 pages0606 Teaching PlanKyle ZhangNo ratings yet
- Vimp PaperDocument15 pagesVimp PaperDSYMEC224Trupti BagalNo ratings yet
- PreCalculus CCSS Curriculum Map Unit 4 Draft - 6!12!14revDocument8 pagesPreCalculus CCSS Curriculum Map Unit 4 Draft - 6!12!14revraymart zalunNo ratings yet
- 2 ND TOS8Document2 pages2 ND TOS8Orchids Tumana DonsigNo ratings yet
- Full Download PDF of (Ebook PDF) Calculus and Its Applications Expanded Version Media Update All ChapterDocument43 pagesFull Download PDF of (Ebook PDF) Calculus and Its Applications Expanded Version Media Update All Chapterpxeladawoky90100% (8)
- Gujarat Technological University: Analysis and Design of AlgorithmsDocument3 pagesGujarat Technological University: Analysis and Design of AlgorithmsLion KenanNo ratings yet
- Mixture Models and ApplicationsFrom EverandMixture Models and ApplicationsNizar BouguilaNo ratings yet
- Matrix Operations for Engineers and Scientists: An Essential Guide in Linear AlgebraFrom EverandMatrix Operations for Engineers and Scientists: An Essential Guide in Linear AlgebraNo ratings yet
- Chapter 13Document136 pagesChapter 13tthanhhoai67No ratings yet
- Chapter 11Document99 pagesChapter 11tthanhhoai67No ratings yet
- Chapter 12Document98 pagesChapter 12tthanhhoai67No ratings yet
- Chapter 10Document68 pagesChapter 10tthanhhoai67No ratings yet
- Đường Cong Trong Tọa Độ Cực 2020Document1 pageĐường Cong Trong Tọa Độ Cực 2020tthanhhoai67No ratings yet
- UNIT - 1 Formula and ProcedureDocument4 pagesUNIT - 1 Formula and ProcedurevinothNo ratings yet
- Solving System of Linear Non-Homogeneous Equations: Jacobi'S Iteration MethodDocument8 pagesSolving System of Linear Non-Homogeneous Equations: Jacobi'S Iteration Method20-317 RithvikNo ratings yet
- (FS 2010) Introduction To Finite Element Modelling in Geosciences: Basic PrinciplesDocument10 pages(FS 2010) Introduction To Finite Element Modelling in Geosciences: Basic Principlessandip4884No ratings yet
- The Presentation On Numerical MethodsDocument18 pagesThe Presentation On Numerical MethodsRenu Bharat KewalramaniNo ratings yet
- Advanced Chemical Engineering Mathematics Homework 1 Due Date: 1400/09/06Document1 pageAdvanced Chemical Engineering Mathematics Homework 1 Due Date: 1400/09/06Fatemeh NajafiNo ratings yet
- Math 7 AS Week 3-4Document2 pagesMath 7 AS Week 3-4Marchiel Anne AdrianoNo ratings yet
- Module 3 - 2 Management Science PDFDocument33 pagesModule 3 - 2 Management Science PDFHERNANDO REYESNo ratings yet
- MA-201 Tutorial Sheet-2Document2 pagesMA-201 Tutorial Sheet-2Ankit SharmaNo ratings yet
- Numerical 2222Document15 pagesNumerical 2222Rodalyn AlquisolaNo ratings yet
- Bisection MethodDocument13 pagesBisection MethodSandeep BhattNo ratings yet
- 2012 GaussDocument54 pages2012 GaussKukuh KurniadiNo ratings yet
- 206C-Computer Based Optimization Techniques PDFDocument22 pages206C-Computer Based Optimization Techniques PDFSaranya Dhilipkumar0% (1)
- Question Papers - Linear Prog. and ApplicationsDocument14 pagesQuestion Papers - Linear Prog. and ApplicationsshrutiNo ratings yet
- Table of SpecificationDocument3 pagesTable of SpecificationLeafy SamaNo ratings yet
- 5 Knapsack+BinPack+TSPDocument11 pages5 Knapsack+BinPack+TSPMANOJ KUMAR SHUKLANo ratings yet
- Elementary Algebra Graphs and Authentic Applications 2nd Edition Lehmann Test BankDocument46 pagesElementary Algebra Graphs and Authentic Applications 2nd Edition Lehmann Test Bankhillyobsidian8hi42g100% (34)
- 0 - Solutions Algebraic Transcendental EquationsDocument3 pages0 - Solutions Algebraic Transcendental EquationsArbia ZabiNo ratings yet
- Lecture0 PDFDocument9 pagesLecture0 PDF_MerKeZ_No ratings yet
- Assignment - 1: SolutionDocument4 pagesAssignment - 1: SolutionEsrat SharminNo ratings yet
- Stats Modeling The World 4th Edition Bock Test BankDocument48 pagesStats Modeling The World 4th Edition Bock Test Bankselinaanhon9a100% (27)
- Linear Programming: Model Formulation and Graphical SolutionDocument29 pagesLinear Programming: Model Formulation and Graphical SolutionNat SeenamngoenNo ratings yet
- LaberportDocument9 pagesLaberportMark GadgetsNo ratings yet
- Or - AssignmentDocument33 pagesOr - AssignmentManas JainNo ratings yet
- JW Chapter11solutionsDocument49 pagesJW Chapter11solutionssan.ras0715No ratings yet
- Quantitative Analysis For Management 13Th Edition Render Test Bank Full Chapter PDFDocument52 pagesQuantitative Analysis For Management 13Th Edition Render Test Bank Full Chapter PDFvernier.decyliclnn4100% (7)
- NpTel Numerical Analysis SyllabusDocument4 pagesNpTel Numerical Analysis SyllabusAndrew BaaNo ratings yet
- 3rd Periodical Test in Math 1Document1 page3rd Periodical Test in Math 1Binoy BomboNo ratings yet
- Geometric ProgrammingDocument23 pagesGeometric Programmingpandeybunty7076738878motuNo ratings yet
- NCERT Solutions For Class 10 Chapter 2 Polynomials Exercise 2.2Document3 pagesNCERT Solutions For Class 10 Chapter 2 Polynomials Exercise 2.2Arsalan Ali KhanNo ratings yet