Download as pdf or txt
You might also like
- IEEE - STD C57.12.90-2010 CONVERSION 50-60HZDocument5 pagesIEEE - STD C57.12.90-2010 CONVERSION 50-60HZTXEMANo ratings yet
- ECC206 - Ch6 - Distributed Forces - Centroids and Centers of ForcesDocument36 pagesECC206 - Ch6 - Distributed Forces - Centroids and Centers of ForcesGravisNo ratings yet
- Hyd Act TheoryDocument11 pagesHyd Act TheoryAbeer KhatriNo ratings yet
- 1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterDocument8 pages1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterTài Nguyễn Minh NhậtNo ratings yet
- 1997 pachterQFTDocument18 pages1997 pachterQFTCumhur ÖzbaşNo ratings yet
- Gregov Siminiati COMPUTERSIMULATIONOFALABORATORYHYDRAULICSYSTEMWITHMATLAB-SIMULINKDocument8 pagesGregov Siminiati COMPUTERSIMULATIONOFALABORATORYHYDRAULICSYSTEMWITHMATLAB-SIMULINKNavneetNo ratings yet
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- Multicell Convertor - ObservatoriDocument6 pagesMulticell Convertor - ObservatoriAndrei CocorNo ratings yet
- 15 Chapter 9Document16 pages15 Chapter 9deepakraina99No ratings yet
- Using Tensors To Track Earthquakes On Hydraulic Shaker TablesDocument5 pagesUsing Tensors To Track Earthquakes On Hydraulic Shaker TablesJose Luis SarmientoNo ratings yet
- Acosta Aj 1952Document58 pagesAcosta Aj 1952dodo1986No ratings yet
- Study of Pneumatic Speed Control System With Friction Force CompensationDocument8 pagesStudy of Pneumatic Speed Control System With Friction Force CompensationInternational Journal of Research in Engineering and ScienceNo ratings yet
- Single Phase Switching Parameters For Untransposed EHV TLDocument12 pagesSingle Phase Switching Parameters For Untransposed EHV TLCarlos Lino Rojas AgüeroNo ratings yet
- 2-Ijems 16 (1) 7-13Document7 pages2-Ijems 16 (1) 7-13Sasko DimitrovNo ratings yet
- Ada 320213Document69 pagesAda 320213amir_karimiNo ratings yet
- EE206 Control Systems Tutorial - 18Document5 pagesEE206 Control Systems Tutorial - 18Haelu KuNo ratings yet
- Chapter 11 (11-23-04)Document61 pagesChapter 11 (11-23-04)sruthimeena6891No ratings yet
- Chapter 11Document46 pagesChapter 11ninoska217608No ratings yet
- B.E"/B.Tech. Degree Examination, November/December 2005Document3 pagesB.E"/B.Tech. Degree Examination, November/December 2005vsalaiselvamNo ratings yet
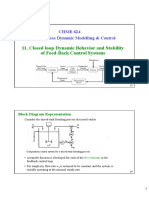
- Closed Loop Dynamic Behavior and Stability of Feed-Back Control SystemsDocument21 pagesClosed Loop Dynamic Behavior and Stability of Feed-Back Control Systemsali aljifriNo ratings yet
- (Iq) Li: P H Y - S I C A Polonica 1987 Voi. XXXV, No. 3Document15 pages(Iq) Li: P H Y - S I C A Polonica 1987 Voi. XXXV, No. 3SudharsananPRSNo ratings yet
- Models of OscillationDocument7 pagesModels of OscillationAnonymous KbCB89PNo ratings yet
- Application of Cyclic Operation To Acetic-Water Separation Patrut 2019Document6 pagesApplication of Cyclic Operation To Acetic-Water Separation Patrut 2019nehaNo ratings yet
- Dynamic Characteristics of Pneumatic Transmission Lines and Its Equivalent SystemsDocument11 pagesDynamic Characteristics of Pneumatic Transmission Lines and Its Equivalent Systemsbaja2014No ratings yet
- Backstepping Sliding Mode Control For Electro-HydraulicDocument9 pagesBackstepping Sliding Mode Control For Electro-HydraulicIwan IstantoNo ratings yet
- محاضرة نبتل بتاع الهيدروليك سيستم8Document6 pagesمحاضرة نبتل بتاع الهيدروليك سيستم8قطائف العواطفNo ratings yet
- Laboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Document5 pagesLaboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Virali DoshiNo ratings yet
- MIT2 04AS13 SuppLecture10Document9 pagesMIT2 04AS13 SuppLecture10Rau Lance CunananNo ratings yet
- Flatness-Based ControlDocument6 pagesFlatness-Based ControlQuyết Nguyễn CôngNo ratings yet
- Meerut Institute of Engineering and TechnologyDocument14 pagesMeerut Institute of Engineering and TechnologyAvinash ChauhanNo ratings yet
- A Passivity-Based Adaptive Sliding Mode Position-Force Control For ManipulatorsDocument13 pagesA Passivity-Based Adaptive Sliding Mode Position-Force Control For ManipulatorsEmadNo ratings yet
- Experimental Investigation of The PlungeDocument22 pagesExperimental Investigation of The PlungePrakash Duraisamy CITNo ratings yet
- Feedbacks in Hydraulic Servo Systems RydbergDocument21 pagesFeedbacks in Hydraulic Servo Systems Rydbergc1ronNo ratings yet
- Characterization of High-Q Resonators For Microwave Filter ApplicationsDocument4 pagesCharacterization of High-Q Resonators For Microwave Filter ApplicationshazardassNo ratings yet
- CSTRDocument12 pagesCSTRRuri Agung WahyuonoNo ratings yet
- Chapter 8 Well ModelsDocument19 pagesChapter 8 Well Modelstamurt80No ratings yet
- Innovative Project Proposal On "Simulation of PR Controller''Document14 pagesInnovative Project Proposal On "Simulation of PR Controller''prajeet95No ratings yet
- Self Excitation of Induction Motors With Series CapacitorsDocument7 pagesSelf Excitation of Induction Motors With Series CapacitorsDiego Nicolás López-RamírezNo ratings yet
- Hidraulik System With Matlab PDFDocument8 pagesHidraulik System With Matlab PDFrobinsongiraldoNo ratings yet
- The Effect of Operating Pressure On Distillation Column ThroughputDocument4 pagesThe Effect of Operating Pressure On Distillation Column ThroughputMohamed RamadanNo ratings yet
- AGC2Document16 pagesAGC2Fengxing ZhuNo ratings yet
- 5542-Article Text PDF-9300-1-10-20130718Document21 pages5542-Article Text PDF-9300-1-10-20130718zeinabNo ratings yet
- Settling Time of OpampDocument7 pagesSettling Time of OpampTumay KanarNo ratings yet
- Svcture 21fweDocument7 pagesSvcture 21fwe666667No ratings yet
- Chapter 3Document26 pagesChapter 3kokoaung 30697No ratings yet
- 58-Dynamic Behavior of A Hydraulic Braking Valve Incorporating A Hydraulic Servo ActuatorDocument15 pages58-Dynamic Behavior of A Hydraulic Braking Valve Incorporating A Hydraulic Servo ActuatorGalal RabieNo ratings yet
- SMiRT 25 Paper Dynamic Model - DubykDocument10 pagesSMiRT 25 Paper Dynamic Model - DubykTopNameNo ratings yet
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Document6 pagesIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuNo ratings yet
- Oliver Os 1982Document9 pagesOliver Os 1982MARIO KONSACHRISTIAN 171424017No ratings yet
- Turbulence and Standing Waves in Oscillatory Chemical Reactions With Global CouplingDocument7 pagesTurbulence and Standing Waves in Oscillatory Chemical Reactions With Global CouplingVikram VenkatesanNo ratings yet
- Conf 2001 05Document9 pagesConf 2001 05Ana LutovacNo ratings yet
- Finite Amplifier Gain and Bandwidth Effects in Switched-Capacitor FiltersDocument4 pagesFinite Amplifier Gain and Bandwidth Effects in Switched-Capacitor Filtersbasemsoufi2No ratings yet
- Cartesian Impedance Control of RedundantDocument6 pagesCartesian Impedance Control of Redundant이재봉No ratings yet
- Research On SVPWM OkDocument6 pagesResearch On SVPWM OkAnonymous 1D3dCWNcNo ratings yet
- Speed of Motor Which I'd ControlDocument15 pagesSpeed of Motor Which I'd Controlsagarahir151No ratings yet
- CH 19Document18 pagesCH 19Dr. Rama Raju KunadharajuNo ratings yet
- Control Design and Dynamic Performance Analysis of A Wind TurbinDocument5 pagesControl Design and Dynamic Performance Analysis of A Wind TurbinMdzayd EL FahimeNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- Theoretical Calculations of The Distribution of Aerodynamic Loading On A Delta WingDocument35 pagesTheoretical Calculations of The Distribution of Aerodynamic Loading On A Delta WingHarsha HarNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Computational NeuroendocrinologyFrom EverandComputational NeuroendocrinologyDuncan J. MacGregorNo ratings yet
- Medical Device Manufacturer Perspective - ASTM Material Test Methods For Assessing The ... (PDFDrive)Document24 pagesMedical Device Manufacturer Perspective - ASTM Material Test Methods For Assessing The ... (PDFDrive)fatimah100% (1)
- Intro Expl Dyn 17.0 M06 Explicit Dynamics Analysis Settings and ParametersDocument48 pagesIntro Expl Dyn 17.0 M06 Explicit Dynamics Analysis Settings and ParametersN.g. Nagaraj100% (1)
- Maxwell's Equations. Electromagnetic WavesDocument15 pagesMaxwell's Equations. Electromagnetic WavesPrasanth KumarNo ratings yet
- DPP 1 SomDocument2 pagesDPP 1 Somacharjeesneha68No ratings yet
- Machine Fouindation 1 PDFDocument20 pagesMachine Fouindation 1 PDFjohn streetNo ratings yet
- Development of Aluminum Honeycomb Cored Carbon FibDocument29 pagesDevelopment of Aluminum Honeycomb Cored Carbon FibRahulNo ratings yet
- 2015 Effect of Bed Characters On The Direct Synthesis of Dimethyldichlorosilane in Fluidized Bed ReactorDocument8 pages2015 Effect of Bed Characters On The Direct Synthesis of Dimethyldichlorosilane in Fluidized Bed ReactorZoushuang LiNo ratings yet
- Pressure Vessel Design Manual (Moss) 205Document1 pagePressure Vessel Design Manual (Moss) 205anu radha100% (1)
- One Dimensional Isentropic FlowDocument2 pagesOne Dimensional Isentropic FlowKk LeopardNo ratings yet
- Course Description: Anthony - Adeyanju@sta - Uwi.eduDocument26 pagesCourse Description: Anthony - Adeyanju@sta - Uwi.eduRiaz JokanNo ratings yet
- Motion in PlaneDocument1 pageMotion in Planerina85293No ratings yet
- Mechanical Properties of Carbon Fiber Composite MaterialsDocument2 pagesMechanical Properties of Carbon Fiber Composite MaterialsAakashRanjanNo ratings yet
- Bishop (1966)Document42 pagesBishop (1966)Ramon NazarNo ratings yet
- Chap. 18 Rotation in Two Dimensions: 1. The Choo-Choog Machine (IV) : Torque and Angular MomentumDocument12 pagesChap. 18 Rotation in Two Dimensions: 1. The Choo-Choog Machine (IV) : Torque and Angular MomentumfudogNo ratings yet
- Emd Part2Document372 pagesEmd Part2kgrhoadsNo ratings yet
- Structural AnalysisDocument12 pagesStructural Analysisabhishek5810No ratings yet
- Arihant 40 Days Crash Course For JEE Mains 2022 PhysicsDocument517 pagesArihant 40 Days Crash Course For JEE Mains 2022 PhysicsNihilism: Nothing and Everything100% (1)
- Graetz Number FulltextDocument5 pagesGraetz Number FulltextMelwin RajNo ratings yet
- RC 2019Document3 pagesRC 2019aloy locsinNo ratings yet
- 1976 - Book - Spectroscopy (Volume Three)Document334 pages1976 - Book - Spectroscopy (Volume Three)T BranizNo ratings yet
- Impuse Worksheet AnswersDocument6 pagesImpuse Worksheet AnswersLiana Rose MeregildoNo ratings yet
- Determination of The Best Models For Reinforced Concrete Struts and TiesDocument9 pagesDetermination of The Best Models For Reinforced Concrete Struts and TiesBadr AmmarNo ratings yet
- Ministry of Education Yangon Technological University Department of Civil EngineeringDocument72 pagesMinistry of Education Yangon Technological University Department of Civil EngineeringCho WaiNo ratings yet
- Cp502 Advanced Fluid Mechanics: University of Peradeniya Faculty of EngineeringDocument4 pagesCp502 Advanced Fluid Mechanics: University of Peradeniya Faculty of EngineeringPrabhasha JayasundaraNo ratings yet
- Huggins, E.R. - Calculus 2000Document293 pagesHuggins, E.R. - Calculus 2000DoCasa100% (2)
- Lecture10 Part 3 Current DensityDocument11 pagesLecture10 Part 3 Current DensityObaid ur RehmanNo ratings yet