Download as docx, pdf, or txt
You might also like
- This Homework Is Due On Wednesday, February 19, 2020, at 11:59PM. Self-Grades Are Due On Monday, February 24, 2019, at 11:59PM. 1 Complex NumbersDocument18 pagesThis Homework Is Due On Wednesday, February 19, 2020, at 11:59PM. Self-Grades Are Due On Monday, February 24, 2019, at 11:59PM. 1 Complex NumbersBella ZionNo ratings yet
- Cosmotic Surgical Center Business PlanDocument37 pagesCosmotic Surgical Center Business PlanRamchandra Cv100% (1)
- Non Deliverable ForwardDocument17 pagesNon Deliverable ForwardManish GuptaNo ratings yet
- ReligionsDocument4 pagesReligionsPia Flores67% (3)
- P10 11bDocument4 pagesP10 11bPrayoga AgustoNo ratings yet
- PEP 2021 Phase 2 Selection Test 5 SolutionDocument9 pagesPEP 2021 Phase 2 Selection Test 5 SolutionMarcus PoonNo ratings yet
- JuanPabloWilches Report2Document4 pagesJuanPabloWilches Report2Juan Pablo Wilches ArboledaNo ratings yet
- Lec 30Document4 pagesLec 30Ali RajaNo ratings yet
- Rolle, MVT TheoremDocument16 pagesRolle, MVT Theorem01795494168nazmulhasanNo ratings yet
- Final Exam - MMDocument15 pagesFinal Exam - MMMuhammad Saleem Muhammad SaleemNo ratings yet
- University of Limpopo: MemorandumDocument6 pagesUniversity of Limpopo: MemorandumNtokozo MasemulaNo ratings yet
- Pgmath2023 SolutionsDocument3 pagesPgmath2023 Solutionspublicacc71No ratings yet
- N1 - Equations of Motion For Viscous Incompressible FluidDocument17 pagesN1 - Equations of Motion For Viscous Incompressible FluidAnirban SarkarNo ratings yet
- MA 353 Problem Set 4Document6 pagesMA 353 Problem Set 4Caden MatthewsNo ratings yet
- Che 303 (Transport Phenomena) : Lecture 3 - Continuity EquationDocument5 pagesChe 303 (Transport Phenomena) : Lecture 3 - Continuity Equationodubade opeyemiNo ratings yet
- Math AssignmentDocument8 pagesMath AssignmentQ VanichaNo ratings yet
- MATH 131 Final Exam SampleDocument9 pagesMATH 131 Final Exam SampleJASLASKANo ratings yet
- Lecture 7Document6 pagesLecture 7College Application CenterNo ratings yet
- Lecture 29-Revision of Unit5 and MCQ PracticeDocument28 pagesLecture 29-Revision of Unit5 and MCQ PracticeAerra ManirajNo ratings yet
- Vector Calculus and Its ApplicationsDocument22 pagesVector Calculus and Its ApplicationsMidhun MNo ratings yet
- 0 C4 04Document39 pages0 C4 04Cartoon WorldNo ratings yet
- Finite Difference MethodDocument30 pagesFinite Difference MethodDUSHYANT KUMAR SENGARNo ratings yet
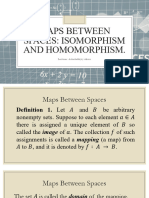
- Lec5 Maps - Between - SpacesDocument53 pagesLec5 Maps - Between - Spacesansat5.ansatNo ratings yet
- Mam 5204 System Dynamics PR 20210410Document61 pagesMam 5204 System Dynamics PR 20210410İsmail BozkurtNo ratings yet
- Ijmtt-Mb, SK-2020 (2020-21)Document6 pagesIjmtt-Mb, SK-2020 (2020-21)Maths DepartmentNo ratings yet
- Ajms 482 23Document7 pagesAjms 482 23BRNSS Publication Hub InfoNo ratings yet
- Synthesis AerodynamicsDocument12 pagesSynthesis AerodynamicsMarcoNo ratings yet
- Hermite InterpolationDocument7 pagesHermite InterpolationSaurabhNo ratings yet
- Archit UG ProjectDocument11 pagesArchit UG ProjectRitik ChannNo ratings yet
- Fluid Mechanics QuestionsDocument12 pagesFluid Mechanics QuestionsnaiaraNo ratings yet
- Theory of Structures 1 Chapter 5.0 PDFDocument8 pagesTheory of Structures 1 Chapter 5.0 PDFEfraim PablacioNo ratings yet
- 3D Dynamics - 0103 - Fundamentals of Kinematics - Motion Path KinematicsDocument7 pages3D Dynamics - 0103 - Fundamentals of Kinematics - Motion Path Kinematicssangram6957No ratings yet
- The First Fundamental Theorem of Calculus Second Fundamental Theorem of CalculusDocument7 pagesThe First Fundamental Theorem of Calculus Second Fundamental Theorem of Calculuskierby sanbagrielNo ratings yet
- Introduction To Complex Function E-NoteDocument9 pagesIntroduction To Complex Function E-NotexingmingNo ratings yet
- Lecture 5Document6 pagesLecture 5Debayan BiswasNo ratings yet
- Geg 311 Vector FunctionsDocument19 pagesGeg 311 Vector Functionsakinyemi.favour.isaacNo ratings yet
- CE50p ProjectDocument5 pagesCE50p ProjectEarl TuazonNo ratings yet
- Cal 2 Review22Document13 pagesCal 2 Review22Colin ZachauNo ratings yet
- Random Variate Generation: 3.1 Inverse Transform MethodDocument14 pagesRandom Variate Generation: 3.1 Inverse Transform MethodLuka TodorNo ratings yet
- FEA Project Report - Alireza KhorshidiDocument11 pagesFEA Project Report - Alireza KhorshidicvcNo ratings yet
- Vector Calculus NotesDocument3 pagesVector Calculus NotesChamil GomesNo ratings yet
- Two-Level SystemDocument6 pagesTwo-Level System蔡蓁羚No ratings yet
- Lec 04Document9 pagesLec 04JAGDISH SINGH MEHTANo ratings yet
- Name: Remalyn FajardoDocument13 pagesName: Remalyn FajardoRemalyn Villahermosa FajardoNo ratings yet
- Residue Inverse Laplace Transforms in ComplexDocument5 pagesResidue Inverse Laplace Transforms in Complexharidwarphotos1920No ratings yet
- Hyperbolic FunctionsDocument23 pagesHyperbolic FunctionsPaula FanaNo ratings yet
- Class Notes On Gauss' Divergence Theorem: Sandip K. MaitiDocument11 pagesClass Notes On Gauss' Divergence Theorem: Sandip K. MaitiaakashbalaprajapathiofficialNo ratings yet
- An Exact Derivation of The Thomas Precession RateDocument11 pagesAn Exact Derivation of The Thomas Precession RateALEX sponsoredNo ratings yet
- PEP 2020 Phase 2 Selection Test 3 - SolutionDocument6 pagesPEP 2020 Phase 2 Selection Test 3 - SolutionMarcus PoonNo ratings yet
- Differentiability and DerivativeDocument2 pagesDifferentiability and DerivativeSaumik KarfaNo ratings yet
- EEP312 Chapter 5 Numerical DifferentiationDocument26 pagesEEP312 Chapter 5 Numerical DifferentiationLemonade TVNo ratings yet
- Vcde Tutorial Sem-Ii 2022-23Document12 pagesVcde Tutorial Sem-Ii 2022-23Sruthi ChallapalliNo ratings yet
- Lec 25 Laplace DerivativesDocument29 pagesLec 25 Laplace DerivativesTalha Chaudhary100% (1)
- Lag Rang Ian Dynamic Formulation of A Four-Bar MechanismDocument7 pagesLag Rang Ian Dynamic Formulation of A Four-Bar MechanismpradeepkumaruvNo ratings yet
- Research Article: A Simplification For Exp-Function Method When The Balanced Nonlinear Term Is A Certain ProductDocument6 pagesResearch Article: A Simplification For Exp-Function Method When The Balanced Nonlinear Term Is A Certain ProductadilNo ratings yet
- MATH 20063wk5Document18 pagesMATH 20063wk5Reyziel BarganNo ratings yet
- MTH 102 and MTH 106 Lecture Notes On Differential Calculus and Its ApplicationsDocument29 pagesMTH 102 and MTH 106 Lecture Notes On Differential Calculus and Its ApplicationslongepraisekemmyNo ratings yet
- P11 2aDocument7 pagesP11 2aFachri MunadiNo ratings yet
- Wavelength and Wave Period Relationship With Wave Amplitude: A Velocity Potential FormulationDocument7 pagesWavelength and Wave Period Relationship With Wave Amplitude: A Velocity Potential FormulationIJAERS JOURNALNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Radically Elementary Probability Theory. (AM-117), Volume 117From EverandRadically Elementary Probability Theory. (AM-117), Volume 117Rating: 4 out of 5 stars4/5 (2)
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Department of Musicology Faculty of MusicDocument196 pagesDepartment of Musicology Faculty of MusicBojan MarjanovicNo ratings yet
- People Vs OandasanDocument2 pagesPeople Vs OandasanAdoha Lei T Blanco100% (1)
- Ivri B 449Document688 pagesIvri B 449Francisco Orellana100% (1)
- Japan TechnologyDocument4 pagesJapan TechnologyMa Leonora SorianoNo ratings yet
- DLL WK 10 LC 171819Document14 pagesDLL WK 10 LC 171819Regiel Guiang ArnibalNo ratings yet
- HP System Management Homepage 6.0 User Guide: HP-UX, Linux, and Windows Operating SystemsDocument102 pagesHP System Management Homepage 6.0 User Guide: HP-UX, Linux, and Windows Operating SystemsFábio AndréNo ratings yet
- Cit 15 SyllabusDocument5 pagesCit 15 Syllabusapi-235716776No ratings yet
- BS 2782-10 Method 1005 1977Document13 pagesBS 2782-10 Method 1005 1977Yaser ShabasyNo ratings yet
- Semi Detailed Lesson PlanDocument2 pagesSemi Detailed Lesson Planrey ramirezNo ratings yet
- Types of VolcanoesDocument10 pagesTypes of VolcanoesRobert MestiolaNo ratings yet
- Psalm 127 - Overview"Document1 pagePsalm 127 - Overview"Malcolm CoxNo ratings yet
- Vijaya DairyDocument65 pagesVijaya DairyAjay KumarNo ratings yet
- Timeline Bendahara DesemberDocument2 pagesTimeline Bendahara DesemberSuci Ayu ChairunaNo ratings yet
- Problems 1Document2 pagesProblems 1Rajiv KumarNo ratings yet
- Class XII Applied Mathematics 2023-24 (K R Mangalam School)Document7 pagesClass XII Applied Mathematics 2023-24 (K R Mangalam School)GouriJayanNo ratings yet
- Leakage Management TechnologiesDocument380 pagesLeakage Management TechnologiesWengineerNo ratings yet
- Game Master's Kit: An Accessory For The Dragon Age RPGDocument32 pagesGame Master's Kit: An Accessory For The Dragon Age RPGLuiz Fernando Rodrigues CarrijoNo ratings yet
- 207 Money Saving FixesDocument149 pages207 Money Saving FixesCarmen Elena Nastasă100% (3)
- The Separation and Synthesis of Lipidic 1,2-And 1,3-Diols From Natural Phenolic Lipids For The Complexation and Recovery of BoronDocument23 pagesThe Separation and Synthesis of Lipidic 1,2-And 1,3-Diols From Natural Phenolic Lipids For The Complexation and Recovery of BoronNanasaheb PatilNo ratings yet
- The Sophia Sun: in This Issue..Document32 pagesThe Sophia Sun: in This Issue..Gi3iBq7uAANo ratings yet
- MATH Action Plan (2022 2023)Document3 pagesMATH Action Plan (2022 2023)Kenny Ann Grace Batiancila100% (7)
- En Skydeck Wall ChartDocument3 pagesEn Skydeck Wall ChartPaplu PaulNo ratings yet
- Feasibility Study Project Proposal RequirementsDocument2 pagesFeasibility Study Project Proposal RequirementsErick NgosiaNo ratings yet
- CPESC Scope of PracticeDocument3 pagesCPESC Scope of Practicealphapinnacle techNo ratings yet
- Nichita Elena Mirela Caig If en Simion Sorin GabrielDocument66 pagesNichita Elena Mirela Caig If en Simion Sorin GabrielrainristeaNo ratings yet
- BGP (Border Gateway Protocol) - Port 179: Gateway Protocols (IGP's)Document32 pagesBGP (Border Gateway Protocol) - Port 179: Gateway Protocols (IGP's)Nitesh MulukNo ratings yet
- Environmental ScienceDocument2 pagesEnvironmental Sciencegillianbernice.alaNo ratings yet