
Capitulo 1
Capitulo 1
You might also like
- Virtual Capacitor Experiment NameDocument3 pagesVirtual Capacitor Experiment Nameconstantine1106No ratings yet
- Ah 00212Document17 pagesAh 00212maithuong8567% (6)
- Capitulo 2 y 3Document49 pagesCapitulo 2 y 3Marco GuerreroNo ratings yet
- Multiphysics Modeling and Optimization of Mechatronic Multibody SystemsDocument29 pagesMultiphysics Modeling and Optimization of Mechatronic Multibody SystemsaesotaerikNo ratings yet
- PB Modelling of Physical Systems FinalDocument56 pagesPB Modelling of Physical Systems FinalKhristilera RodriguezNo ratings yet
- Modelling Mechatronic Systems and Control: MFE 3004 Mechatronics IDocument16 pagesModelling Mechatronic Systems and Control: MFE 3004 Mechatronics IShino BabuNo ratings yet
- Modeling of Electromechanical Systems PDFDocument44 pagesModeling of Electromechanical Systems PDFBrandon GordonNo ratings yet
- Mathematical Modeling in Chemical EngineeringDocument25 pagesMathematical Modeling in Chemical Engineerings9n9No ratings yet
- System Models, Design and Implementation System ModelsDocument15 pagesSystem Models, Design and Implementation System ModelsHaroon AhmedNo ratings yet
- Unit 3 - Design and CodingDocument26 pagesUnit 3 - Design and Coding160 NikeshNo ratings yet
- CH01 ModelingSystemsDocument20 pagesCH01 ModelingSystemspraveen alwisNo ratings yet
- System Modeling: PRESSENTED BY:-Er. Saurabh MalpotraDocument36 pagesSystem Modeling: PRESSENTED BY:-Er. Saurabh MalpotraCr ZyNo ratings yet
- Software Ngineering ModelingDocument54 pagesSoftware Ngineering ModelingblinNo ratings yet
- System ModellingDocument18 pagesSystem ModellingKHALiFA OpNo ratings yet
- Design & ImplementationDocument6 pagesDesign & ImplementationHassan .YNo ratings yet
- Epfl Chapter 7Document18 pagesEpfl Chapter 7ioanciorneiNo ratings yet
- System Integration and Architecture 1Document8 pagesSystem Integration and Architecture 1charimaine hernandezNo ratings yet
- TSMC 1984 6313345Document9 pagesTSMC 1984 6313345RicardoNo ratings yet
- System Modelling & Simulation of Energy SystemsDocument35 pagesSystem Modelling & Simulation of Energy SystemsH.J.PrabhuNo ratings yet
- DMS Chapter2 Part1Document24 pagesDMS Chapter2 Part1aman muleNo ratings yet
- 2008 Chapter BasicAtomisticModelingDocument64 pages2008 Chapter BasicAtomisticModelingHiran ChathurangaNo ratings yet
- Se 3Document14 pagesSe 3prsh22mcaNo ratings yet
- DMS Chapter 2Document64 pagesDMS Chapter 2aman muleNo ratings yet
- (Ortega2001) Putting Energy Back in ControlDocument16 pages(Ortega2001) Putting Energy Back in ControlFernando LoteroNo ratings yet
- Modeling and Simulation PrinciplesDocument28 pagesModeling and Simulation PrinciplesPraveen D JadhavNo ratings yet
- Control Lab ManualDocument147 pagesControl Lab ManualZainab AliNo ratings yet
- 233 CSM Lecture Notes 1Document15 pages233 CSM Lecture Notes 1rub786100% (1)
- Model-In-The-Loop Testing: AbstractDocument17 pagesModel-In-The-Loop Testing: AbstractRamanNo ratings yet
- 4 SIA ModuleDocument7 pages4 SIA ModuleZhea UrsuaNo ratings yet
- Empirical and Analytical Modelling of System DynamicsDocument12 pagesEmpirical and Analytical Modelling of System DynamicsOthniel EmejeNo ratings yet
- System Modelling Ch5Document53 pagesSystem Modelling Ch5Deniecia FrancisNo ratings yet
- SE Chapter 5Document4 pagesSE Chapter 5Mohamed Abdirahman AddowNo ratings yet
- Chapter 5Document28 pagesChapter 5Feras JbourNo ratings yet
- System MOdelingDocument73 pagesSystem MOdelingSadaf ManoNo ratings yet
- 1 Chapter 5 System ModelingDocument53 pages1 Chapter 5 System Modelingtrà giang võ thịNo ratings yet
- Chapter 1 - 1Document34 pagesChapter 1 - 1bezawitg2002No ratings yet
- Se Model 4Document8 pagesSe Model 4Praveen KumarNo ratings yet
- Mathematical Modeling and Numerical Analysis M.SC PDFDocument163 pagesMathematical Modeling and Numerical Analysis M.SC PDFZaidoon MohsinNo ratings yet
- Chapter 5 System Modeling 1Document20 pagesChapter 5 System Modeling 1Etengal SebelasNo ratings yet
- Reactive Systems: Appendix 2Document5 pagesReactive Systems: Appendix 2Ana MarianaNo ratings yet
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Algebra SoftwareDocument13 pagesAlgebra SoftwareUmesh MundhraNo ratings yet
- Modl and Sim - UNIT 3Document12 pagesModl and Sim - UNIT 3Anjali ShrivastavNo ratings yet
- System Identification Concept & MethodsDocument5 pagesSystem Identification Concept & MethodsTuğrul YazganNo ratings yet
- Modeling and Simulating Dynamical SystemsDocument25 pagesModeling and Simulating Dynamical SystemsMarques Patricio MambaNo ratings yet
- Design of Mechatronics System QBDocument14 pagesDesign of Mechatronics System QBChandni DayakarNo ratings yet
- System Models PDFDocument17 pagesSystem Models PDFJuarniey WangNo ratings yet
- System Modeling Unit3 NotesDocument32 pagesSystem Modeling Unit3 NotesAmruta IngoleNo ratings yet
- Q1) Explain Time-Slicing Approach & Discrete-Event Simulation ApproachDocument9 pagesQ1) Explain Time-Slicing Approach & Discrete-Event Simulation ApproachAnkit VarmaNo ratings yet
- CH 05Document60 pagesCH 05nexoro9144No ratings yet
- Steady State Co Simulation With Digsilent Programacion C DSL DLLDocument6 pagesSteady State Co Simulation With Digsilent Programacion C DSL DLLDavid Jose Poma GuillenNo ratings yet
- 1 Chapter 5 System ModelingDocument22 pages1 Chapter 5 System ModelingDat LieuNo ratings yet
- A1 Chapter 1 MAT530 As Latest 5 May 2012Document47 pagesA1 Chapter 1 MAT530 As Latest 5 May 2012quiah89No ratings yet
- CS 410/510 - Software Engineering System Modeling: The Big PictureDocument6 pagesCS 410/510 - Software Engineering System Modeling: The Big PictureNaveed HarshaNo ratings yet
- Simulation and ModellingDocument17 pagesSimulation and ModellingNahom WendNo ratings yet
- Lecture 5 - System ModellingDocument53 pagesLecture 5 - System Modellingabdiburgal5No ratings yet
- Improving The Robustness of Mechatronic SystemsDocument16 pagesImproving The Robustness of Mechatronic SystemsHoa Binh TranNo ratings yet
- Control System Engineering - 1Document22 pagesControl System Engineering - 1Uma MageshwariNo ratings yet
- Physically Oriented Modeling of Heterogeneous Systems: Peter SchwarzDocument12 pagesPhysically Oriented Modeling of Heterogeneous Systems: Peter SchwarzManasi PattarkineNo ratings yet
- How Are Models Used? Mathematical Model Types Starting With Fundamental Laws Getting A Model From Measured Data Summing UpDocument11 pagesHow Are Models Used? Mathematical Model Types Starting With Fundamental Laws Getting A Model From Measured Data Summing Upspj99696649148No ratings yet
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesNo ratings yet
- Wheatstone BridgeDocument8 pagesWheatstone BridgeThiaga RajanNo ratings yet
- 29FL90Document38 pages29FL90canamaNo ratings yet
- A320nx ChecklistDocument6 pagesA320nx ChecklistLoïc BranchereauNo ratings yet
- TM11-2516 Tube Tester Espey Model 105, 1944Document52 pagesTM11-2516 Tube Tester Espey Model 105, 1944david_graves_okstate100% (1)
- GMC Sierra 3500hdDocument607 pagesGMC Sierra 3500hdhecazorla100% (2)
- 2current Electricity PDFDocument43 pages2current Electricity PDFrabinNo ratings yet
- Physics - Electro-Magnetic InductionDocument3 pagesPhysics - Electro-Magnetic InductionNikhil YadavNo ratings yet
- The Pole Shoes of DC Machines Are Fastened To The Pole Core By-MgguygDocument43 pagesThe Pole Shoes of DC Machines Are Fastened To The Pole Core By-MgguygMusaddiq MuhammadNo ratings yet
- Analogic AVR: Operation ManualDocument13 pagesAnalogic AVR: Operation Manualhadi kasmuriNo ratings yet
- GF501411 PSRPT 2023-09-01 17.17.51Document70 pagesGF501411 PSRPT 2023-09-01 17.17.51Rajeev KumarNo ratings yet
- Proline CCDocument207 pagesProline CCramtec10No ratings yet
- Sample Paper Class 10Document187 pagesSample Paper Class 10Panshulaj PechettyNo ratings yet
- A Look at The Power Rating of ResistorsDocument2 pagesA Look at The Power Rating of ResistorsTigrilloNo ratings yet
- Pole Top Equipment Voltage Regulators PDFDocument0 pagesPole Top Equipment Voltage Regulators PDFSalman FaisalNo ratings yet
- Verification Thevenin's and Maximum Power Transfer Theorem: Experiment No.3 DateDocument16 pagesVerification Thevenin's and Maximum Power Transfer Theorem: Experiment No.3 DateSachin DevarakondaNo ratings yet
- PACT Analog: Current TransformersDocument28 pagesPACT Analog: Current TransformersMiguel Bartolo CruzNo ratings yet
- Chapter 2 Basic LawsDocument15 pagesChapter 2 Basic LawsChristian Muli0% (1)
- 240z Alternator UpgradeDocument7 pages240z Alternator UpgradeJose Angel RodriguezNo ratings yet
- EM3Document1 pageEM3balaplcNo ratings yet
- FR4 Suitability of Different Test Voltages For On Site Cable Testing Rev00Document34 pagesFR4 Suitability of Different Test Voltages For On Site Cable Testing Rev00Ho Jun XianNo ratings yet
- Lecture - 1 Electric CircuitsDocument32 pagesLecture - 1 Electric Circuitsمحمد الحديNo ratings yet
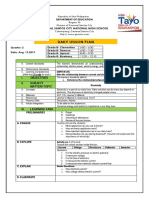
- Daily Lesson Plan: I. Objectives II. Subject Matter/ TopicDocument2 pagesDaily Lesson Plan: I. Objectives II. Subject Matter/ TopicANGELIQUE DIAMALONNo ratings yet
- Ac 1Document40 pagesAc 1Neha ReddyNo ratings yet
- ServoOne Manual Engels PDFDocument80 pagesServoOne Manual Engels PDFBrahmana Sakti utamaNo ratings yet
- Quality Plan For Electrical WorkDocument16 pagesQuality Plan For Electrical WorknercyNo ratings yet
- Experiment #3: Capacitors in Series and Parallel: Show Calculations and UnitsDocument3 pagesExperiment #3: Capacitors in Series and Parallel: Show Calculations and UnitsMari KuljanishviliNo ratings yet
- A Level Physics Definitions (As)Document4 pagesA Level Physics Definitions (As)Sabih SiddiqiNo ratings yet
- LAB Manual HVT LABDocument69 pagesLAB Manual HVT LABMuhammad Ali ImranNo ratings yet
























































































Download as pdf or txt
You might also like
- Virtual Capacitor Experiment NameDocument3 pagesVirtual Capacitor Experiment Nameconstantine1106No ratings yet
- Ah 00212Document17 pagesAh 00212maithuong8567% (6)
- Capitulo 2 y 3Document49 pagesCapitulo 2 y 3Marco GuerreroNo ratings yet
- Multiphysics Modeling and Optimization of Mechatronic Multibody SystemsDocument29 pagesMultiphysics Modeling and Optimization of Mechatronic Multibody SystemsaesotaerikNo ratings yet
- PB Modelling of Physical Systems FinalDocument56 pagesPB Modelling of Physical Systems FinalKhristilera RodriguezNo ratings yet
- Modelling Mechatronic Systems and Control: MFE 3004 Mechatronics IDocument16 pagesModelling Mechatronic Systems and Control: MFE 3004 Mechatronics IShino BabuNo ratings yet
- Modeling of Electromechanical Systems PDFDocument44 pagesModeling of Electromechanical Systems PDFBrandon GordonNo ratings yet
- Mathematical Modeling in Chemical EngineeringDocument25 pagesMathematical Modeling in Chemical Engineerings9n9No ratings yet
- System Models, Design and Implementation System ModelsDocument15 pagesSystem Models, Design and Implementation System ModelsHaroon AhmedNo ratings yet
- Unit 3 - Design and CodingDocument26 pagesUnit 3 - Design and Coding160 NikeshNo ratings yet
- CH01 ModelingSystemsDocument20 pagesCH01 ModelingSystemspraveen alwisNo ratings yet
- System Modeling: PRESSENTED BY:-Er. Saurabh MalpotraDocument36 pagesSystem Modeling: PRESSENTED BY:-Er. Saurabh MalpotraCr ZyNo ratings yet
- Software Ngineering ModelingDocument54 pagesSoftware Ngineering ModelingblinNo ratings yet
- System ModellingDocument18 pagesSystem ModellingKHALiFA OpNo ratings yet
- Design & ImplementationDocument6 pagesDesign & ImplementationHassan .YNo ratings yet
- Epfl Chapter 7Document18 pagesEpfl Chapter 7ioanciorneiNo ratings yet
- System Integration and Architecture 1Document8 pagesSystem Integration and Architecture 1charimaine hernandezNo ratings yet
- TSMC 1984 6313345Document9 pagesTSMC 1984 6313345RicardoNo ratings yet
- System Modelling & Simulation of Energy SystemsDocument35 pagesSystem Modelling & Simulation of Energy SystemsH.J.PrabhuNo ratings yet
- DMS Chapter2 Part1Document24 pagesDMS Chapter2 Part1aman muleNo ratings yet
- 2008 Chapter BasicAtomisticModelingDocument64 pages2008 Chapter BasicAtomisticModelingHiran ChathurangaNo ratings yet
- Se 3Document14 pagesSe 3prsh22mcaNo ratings yet
- DMS Chapter 2Document64 pagesDMS Chapter 2aman muleNo ratings yet
- (Ortega2001) Putting Energy Back in ControlDocument16 pages(Ortega2001) Putting Energy Back in ControlFernando LoteroNo ratings yet
- Modeling and Simulation PrinciplesDocument28 pagesModeling and Simulation PrinciplesPraveen D JadhavNo ratings yet
- Control Lab ManualDocument147 pagesControl Lab ManualZainab AliNo ratings yet
- 233 CSM Lecture Notes 1Document15 pages233 CSM Lecture Notes 1rub786100% (1)
- Model-In-The-Loop Testing: AbstractDocument17 pagesModel-In-The-Loop Testing: AbstractRamanNo ratings yet
- 4 SIA ModuleDocument7 pages4 SIA ModuleZhea UrsuaNo ratings yet
- Empirical and Analytical Modelling of System DynamicsDocument12 pagesEmpirical and Analytical Modelling of System DynamicsOthniel EmejeNo ratings yet
- System Modelling Ch5Document53 pagesSystem Modelling Ch5Deniecia FrancisNo ratings yet
- SE Chapter 5Document4 pagesSE Chapter 5Mohamed Abdirahman AddowNo ratings yet
- Chapter 5Document28 pagesChapter 5Feras JbourNo ratings yet
- System MOdelingDocument73 pagesSystem MOdelingSadaf ManoNo ratings yet
- 1 Chapter 5 System ModelingDocument53 pages1 Chapter 5 System Modelingtrà giang võ thịNo ratings yet
- Chapter 1 - 1Document34 pagesChapter 1 - 1bezawitg2002No ratings yet
- Se Model 4Document8 pagesSe Model 4Praveen KumarNo ratings yet
- Mathematical Modeling and Numerical Analysis M.SC PDFDocument163 pagesMathematical Modeling and Numerical Analysis M.SC PDFZaidoon MohsinNo ratings yet
- Chapter 5 System Modeling 1Document20 pagesChapter 5 System Modeling 1Etengal SebelasNo ratings yet
- Reactive Systems: Appendix 2Document5 pagesReactive Systems: Appendix 2Ana MarianaNo ratings yet
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Algebra SoftwareDocument13 pagesAlgebra SoftwareUmesh MundhraNo ratings yet
- Modl and Sim - UNIT 3Document12 pagesModl and Sim - UNIT 3Anjali ShrivastavNo ratings yet
- System Identification Concept & MethodsDocument5 pagesSystem Identification Concept & MethodsTuğrul YazganNo ratings yet
- Modeling and Simulating Dynamical SystemsDocument25 pagesModeling and Simulating Dynamical SystemsMarques Patricio MambaNo ratings yet
- Design of Mechatronics System QBDocument14 pagesDesign of Mechatronics System QBChandni DayakarNo ratings yet
- System Models PDFDocument17 pagesSystem Models PDFJuarniey WangNo ratings yet
- System Modeling Unit3 NotesDocument32 pagesSystem Modeling Unit3 NotesAmruta IngoleNo ratings yet
- Q1) Explain Time-Slicing Approach & Discrete-Event Simulation ApproachDocument9 pagesQ1) Explain Time-Slicing Approach & Discrete-Event Simulation ApproachAnkit VarmaNo ratings yet
- CH 05Document60 pagesCH 05nexoro9144No ratings yet
- Steady State Co Simulation With Digsilent Programacion C DSL DLLDocument6 pagesSteady State Co Simulation With Digsilent Programacion C DSL DLLDavid Jose Poma GuillenNo ratings yet
- 1 Chapter 5 System ModelingDocument22 pages1 Chapter 5 System ModelingDat LieuNo ratings yet
- A1 Chapter 1 MAT530 As Latest 5 May 2012Document47 pagesA1 Chapter 1 MAT530 As Latest 5 May 2012quiah89No ratings yet
- CS 410/510 - Software Engineering System Modeling: The Big PictureDocument6 pagesCS 410/510 - Software Engineering System Modeling: The Big PictureNaveed HarshaNo ratings yet
- Simulation and ModellingDocument17 pagesSimulation and ModellingNahom WendNo ratings yet
- Lecture 5 - System ModellingDocument53 pagesLecture 5 - System Modellingabdiburgal5No ratings yet
- Improving The Robustness of Mechatronic SystemsDocument16 pagesImproving The Robustness of Mechatronic SystemsHoa Binh TranNo ratings yet
- Control System Engineering - 1Document22 pagesControl System Engineering - 1Uma MageshwariNo ratings yet
- Physically Oriented Modeling of Heterogeneous Systems: Peter SchwarzDocument12 pagesPhysically Oriented Modeling of Heterogeneous Systems: Peter SchwarzManasi PattarkineNo ratings yet
- How Are Models Used? Mathematical Model Types Starting With Fundamental Laws Getting A Model From Measured Data Summing UpDocument11 pagesHow Are Models Used? Mathematical Model Types Starting With Fundamental Laws Getting A Model From Measured Data Summing Upspj99696649148No ratings yet
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesNo ratings yet
- Wheatstone BridgeDocument8 pagesWheatstone BridgeThiaga RajanNo ratings yet
- 29FL90Document38 pages29FL90canamaNo ratings yet
- A320nx ChecklistDocument6 pagesA320nx ChecklistLoïc BranchereauNo ratings yet
- TM11-2516 Tube Tester Espey Model 105, 1944Document52 pagesTM11-2516 Tube Tester Espey Model 105, 1944david_graves_okstate100% (1)
- GMC Sierra 3500hdDocument607 pagesGMC Sierra 3500hdhecazorla100% (2)
- 2current Electricity PDFDocument43 pages2current Electricity PDFrabinNo ratings yet
- Physics - Electro-Magnetic InductionDocument3 pagesPhysics - Electro-Magnetic InductionNikhil YadavNo ratings yet
- The Pole Shoes of DC Machines Are Fastened To The Pole Core By-MgguygDocument43 pagesThe Pole Shoes of DC Machines Are Fastened To The Pole Core By-MgguygMusaddiq MuhammadNo ratings yet
- Analogic AVR: Operation ManualDocument13 pagesAnalogic AVR: Operation Manualhadi kasmuriNo ratings yet
- GF501411 PSRPT 2023-09-01 17.17.51Document70 pagesGF501411 PSRPT 2023-09-01 17.17.51Rajeev KumarNo ratings yet
- Proline CCDocument207 pagesProline CCramtec10No ratings yet
- Sample Paper Class 10Document187 pagesSample Paper Class 10Panshulaj PechettyNo ratings yet
- A Look at The Power Rating of ResistorsDocument2 pagesA Look at The Power Rating of ResistorsTigrilloNo ratings yet
- Pole Top Equipment Voltage Regulators PDFDocument0 pagesPole Top Equipment Voltage Regulators PDFSalman FaisalNo ratings yet
- Verification Thevenin's and Maximum Power Transfer Theorem: Experiment No.3 DateDocument16 pagesVerification Thevenin's and Maximum Power Transfer Theorem: Experiment No.3 DateSachin DevarakondaNo ratings yet
- PACT Analog: Current TransformersDocument28 pagesPACT Analog: Current TransformersMiguel Bartolo CruzNo ratings yet
- Chapter 2 Basic LawsDocument15 pagesChapter 2 Basic LawsChristian Muli0% (1)
- 240z Alternator UpgradeDocument7 pages240z Alternator UpgradeJose Angel RodriguezNo ratings yet
- EM3Document1 pageEM3balaplcNo ratings yet
- FR4 Suitability of Different Test Voltages For On Site Cable Testing Rev00Document34 pagesFR4 Suitability of Different Test Voltages For On Site Cable Testing Rev00Ho Jun XianNo ratings yet
- Lecture - 1 Electric CircuitsDocument32 pagesLecture - 1 Electric Circuitsمحمد الحديNo ratings yet
- Daily Lesson Plan: I. Objectives II. Subject Matter/ TopicDocument2 pagesDaily Lesson Plan: I. Objectives II. Subject Matter/ TopicANGELIQUE DIAMALONNo ratings yet
- Ac 1Document40 pagesAc 1Neha ReddyNo ratings yet
- ServoOne Manual Engels PDFDocument80 pagesServoOne Manual Engels PDFBrahmana Sakti utamaNo ratings yet
- Quality Plan For Electrical WorkDocument16 pagesQuality Plan For Electrical WorknercyNo ratings yet
- Experiment #3: Capacitors in Series and Parallel: Show Calculations and UnitsDocument3 pagesExperiment #3: Capacitors in Series and Parallel: Show Calculations and UnitsMari KuljanishviliNo ratings yet
- A Level Physics Definitions (As)Document4 pagesA Level Physics Definitions (As)Sabih SiddiqiNo ratings yet
- LAB Manual HVT LABDocument69 pagesLAB Manual HVT LABMuhammad Ali ImranNo ratings yet