Download as pdf or txt
You might also like
- AIAG-VDA Pfmea FormatDocument7 pagesAIAG-VDA Pfmea FormatJohn OoNo ratings yet
- Market Research Survey Sample QuestionnaireDocument4 pagesMarket Research Survey Sample QuestionnaireKhenan James Narisma100% (1)
- Good Information BTC PDFDocument45 pagesGood Information BTC PDFPatrick Perez75% (4)
- Metz - Film Language. A Semiotics of The Cinema PDFDocument284 pagesMetz - Film Language. A Semiotics of The Cinema PDFvruiz_206811100% (11)
- Determination of Emergency Power System Voltage Control ActionsDocument6 pagesDetermination of Emergency Power System Voltage Control ActionsLinda Carolina VasconezNo ratings yet
- Coordinated AVR and Tap Changing Control For An Autonomous Industrial Power SystemDocument7 pagesCoordinated AVR and Tap Changing Control For An Autonomous Industrial Power SystemWakdol LahNo ratings yet
- Static Check Synchronisers: MeasurementsDocument6 pagesStatic Check Synchronisers: MeasurementssravankotlasNo ratings yet
- Optimal Distribution Voltage Control and Coordination With Distributed Generation-jdADocument7 pagesOptimal Distribution Voltage Control and Coordination With Distributed Generation-jdAraghudtsNo ratings yet
- J. B. Ward - Equivalent Circuits For Power Flow StudiesDocument10 pagesJ. B. Ward - Equivalent Circuits For Power Flow StudiesfarhanhosseiniNo ratings yet
- Generator Dispatch by Sensitivity MethodDocument7 pagesGenerator Dispatch by Sensitivity MethodHans John DcruzNo ratings yet
- Impact of Fault Level Constraints On The Economic Operation of Power SystemsDocument8 pagesImpact of Fault Level Constraints On The Economic Operation of Power SystemsAhmed WestministerNo ratings yet
- Frequency Responsive Demand in U.S. Western Power System ModelDocument5 pagesFrequency Responsive Demand in U.S. Western Power System ModelMortuzaNo ratings yet
- Model Predictive Control-Based Real-Time Power System Protection SchemesDocument11 pagesModel Predictive Control-Based Real-Time Power System Protection Schemesjinlei chenNo ratings yet
- N-1 Maximum Transfer CapabilityDocument6 pagesN-1 Maximum Transfer CapabilityElmonster10No ratings yet
- Optimal Tap Setting of Voltage Regulation Transformers Using Batch Reinforcement LearningDocument8 pagesOptimal Tap Setting of Voltage Regulation Transformers Using Batch Reinforcement LearningJone JonathanNo ratings yet
- Flexible High-Speed Load Shedding Using A Crosspoint Switch: Schweitzer Engineering Laboratories, IncDocument11 pagesFlexible High-Speed Load Shedding Using A Crosspoint Switch: Schweitzer Engineering Laboratories, IncojoladapoNo ratings yet
- IEEE PF Correction Using 8085Document4 pagesIEEE PF Correction Using 8085Shivanshu GoswamiNo ratings yet
- Djukanovic 1995Document8 pagesDjukanovic 1995Radmila KolevaNo ratings yet
- Power Flow Method PaperDocument1 pagePower Flow Method Papermr ozairNo ratings yet
- Design and Construction of 20 K VA Automatic Voltage Stabilizer Control SystemDocument11 pagesDesign and Construction of 20 K VA Automatic Voltage Stabilizer Control SystemNimeshNo ratings yet
- Enhancement of Transient Stability in Transmission Line Using SVC Facts ControllerDocument6 pagesEnhancement of Transient Stability in Transmission Line Using SVC Facts ControllerKamran KhanNo ratings yet
- "Ringing", Peaks: IN HV DC PDocument9 pages"Ringing", Peaks: IN HV DC PNohelia CruzNo ratings yet
- Extraneous and False Load Flow SolutionsDocument11 pagesExtraneous and False Load Flow Solutionskcirrenwod100% (1)
- ANALYSIS OF OVERVOLTAGES CAUSED BY TRANSFORMER MAGNETIZING INRUSH CURRENT Povh1978Document11 pagesANALYSIS OF OVERVOLTAGES CAUSED BY TRANSFORMER MAGNETIZING INRUSH CURRENT Povh1978dankorankoNo ratings yet
- Melodi 2017Document8 pagesMelodi 2017Ifedayo OladejiNo ratings yet
- Mod 5 - Zbus AlgoDocument45 pagesMod 5 - Zbus AlgoAppasabgouda BiradarNo ratings yet
- Voltage Regulation PDFDocument10 pagesVoltage Regulation PDFveljal6317No ratings yet
- C e L L I-V Characteristic,: Shows of ofDocument4 pagesC e L L I-V Characteristic,: Shows of ofdenemelikerdemNo ratings yet
- Estimation of Power System Inertia Constant and Capacity of Spinning-Reserve Support Generators Using Measured Frequency TransientsDocument8 pagesEstimation of Power System Inertia Constant and Capacity of Spinning-Reserve Support Generators Using Measured Frequency TransientsadinamartinsNo ratings yet
- Use These Methods Synthesis of Damp-: Try ForDocument5 pagesUse These Methods Synthesis of Damp-: Try ForFelix GamarraNo ratings yet
- Power System Dynamic Response Calculations: in M Each Involves in PerhapsDocument23 pagesPower System Dynamic Response Calculations: in M Each Involves in Perhapsjuan LuisNo ratings yet
- State Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsDocument7 pagesState Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsVarikunta Saikrishna ee22d032No ratings yet
- Integral Approach For Overvoltage Management Based On Field Data and ModellingDocument5 pagesIntegral Approach For Overvoltage Management Based On Field Data and ModellingBožidar Filipović-GrčićNo ratings yet
- Transformer Inrush Current and Related Challenges: International Journal of Emerging Technology and Advanced EngineeringDocument3 pagesTransformer Inrush Current and Related Challenges: International Journal of Emerging Technology and Advanced EngineeringHukmran HussainNo ratings yet
- FACTS Controllers Function in An AC Transmission System: Series and Combined Multiterminal ControllersDocument3 pagesFACTS Controllers Function in An AC Transmission System: Series and Combined Multiterminal ControllersChandra Prakash JainNo ratings yet
- Roblem Verview: N T ObsDocument2 pagesRoblem Verview: N T ObsOriginall LozanoNo ratings yet
- An Integrated Active and Reactive Power Control Scheme For Grid-Connected Photovoltaic Production SystemsDocument6 pagesAn Integrated Active and Reactive Power Control Scheme For Grid-Connected Photovoltaic Production SystemsKirn ZafarNo ratings yet
- Approach To Automatic Contingency Selection byDocument4 pagesApproach To Automatic Contingency Selection byGerman SilvaNo ratings yet
- Carga Frecuencia USADocument8 pagesCarga Frecuencia USAcastrojpNo ratings yet
- Paper 2Document5 pagesPaper 2electrician.powersystemsNo ratings yet
- A Case Study Transient Characteristic of 150 KV Shunt Capacitor Energize Switching Ver.2Document5 pagesA Case Study Transient Characteristic of 150 KV Shunt Capacitor Energize Switching Ver.2YoGi Siregar SilaliNo ratings yet
- 2 Parallel-Inverter System With FailureDocument12 pages2 Parallel-Inverter System With FailureRizwan UllahNo ratings yet
- Modelling and Analysis of SWitching DC-to-DC Converters in Constant-Frequency Current-Programmed Mode, Shi-Ping HsuDocument18 pagesModelling and Analysis of SWitching DC-to-DC Converters in Constant-Frequency Current-Programmed Mode, Shi-Ping HsuTSNo ratings yet
- Pole-Placement Designs of Power System StabilizersDocument7 pagesPole-Placement Designs of Power System StabilizersabelcatayNo ratings yet
- Characterization and Performance Comparison of Ripple-Based Control For Voltage Regulator ModulesDocument8 pagesCharacterization and Performance Comparison of Ripple-Based Control For Voltage Regulator ModulesAnonymous Z1RHn9ENo ratings yet
- Lectura ArticuloDocument6 pagesLectura ArticuloROBERTO CARLOS TORRES MELENDEZNo ratings yet
- Thyristor Controlled Series Capacitor FAIR COPY 1234Document66 pagesThyristor Controlled Series Capacitor FAIR COPY 1234senthil_k23No ratings yet
- VSC Smartgrid VRDocument8 pagesVSC Smartgrid VRNaji AlmusabiNo ratings yet
- Samaan Et Al. - 2022 - Multi-Criteria Based Steady-State and Dynamic ReacDocument13 pagesSamaan Et Al. - 2022 - Multi-Criteria Based Steady-State and Dynamic Reacpato.otarolaNo ratings yet
- IEEE-Voltage Flicker Measurement & AnalysisDocument5 pagesIEEE-Voltage Flicker Measurement & AnalysisGustavo AguayoNo ratings yet
- Evaluation of Power System Transient Stability and Definition of The Basic Criterion PDFDocument8 pagesEvaluation of Power System Transient Stability and Definition of The Basic Criterion PDFostojic007No ratings yet
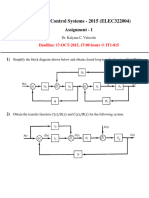
- Acs 2015s2 Assn1Document5 pagesAcs 2015s2 Assn1MiraelNo ratings yet
- Experimental Study of A Power Conditioning System Using Sliding Mode ControlDocument12 pagesExperimental Study of A Power Conditioning System Using Sliding Mode ControlPradeep Kumar SahuNo ratings yet
- 2008 A Control Scheme For PWM Voltage-Source Distributed-Generation Inverters For Fast Load-Voltage Regulation and Effective Mitigation of Unbalanced Voltage DisturbancesDocument13 pages2008 A Control Scheme For PWM Voltage-Source Distributed-Generation Inverters For Fast Load-Voltage Regulation and Effective Mitigation of Unbalanced Voltage Disturbancesdaiduongxanh14113No ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- Wang Da - Ph.D. ThesisDocument162 pagesWang Da - Ph.D. ThesisMary MorseNo ratings yet
- Control of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemDocument6 pagesControl of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemSantiago Bonilla RiveraNo ratings yet
- PLC Based Motor Power Factor ControllerDocument7 pagesPLC Based Motor Power Factor ControllerLaiba GulNo ratings yet
- S 'Umist,: K. UK UK UKDocument6 pagesS 'Umist,: K. UK UK UKRosa Elvira Montalvo MartínezNo ratings yet
- Pdvsa: Overcurrent Coordination Study Electrical SystemDocument6 pagesPdvsa: Overcurrent Coordination Study Electrical SystemAlexander ToyoNo ratings yet
- Control of Voltage Stability Using Sensitmty AnalysisDocument10 pagesControl of Voltage Stability Using Sensitmty AnalysisJuan Alex Arequipa ChecaNo ratings yet
- Power Quality Improvement With SVC in A Power System of 220kVDocument5 pagesPower Quality Improvement With SVC in A Power System of 220kVSalah SaalhNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Adversarial Machine LearningDocument107 pagesAdversarial Machine LearningHonoréNo ratings yet
- Planning and Operation of Multi-Carrier Energy NetworksDocument375 pagesPlanning and Operation of Multi-Carrier Energy NetworksHonoréNo ratings yet
- Understanding Perceptron Algorithm - Handwritten NotesDocument15 pagesUnderstanding Perceptron Algorithm - Handwritten NotesHonoréNo ratings yet
- Development of A Black Start Decision Supporting System For Isolated Power SystemsDocument9 pagesDevelopment of A Black Start Decision Supporting System For Isolated Power SystemsHonoréNo ratings yet
- Black Start Studies For Micro-Grids With Distributed GeneratorsDocument6 pagesBlack Start Studies For Micro-Grids With Distributed GeneratorsHonoréNo ratings yet
- Librairie Pandas-Partie 1Document16 pagesLibrairie Pandas-Partie 1HonoréNo ratings yet
- Transmission Lines - Part II: Goals For TodayDocument23 pagesTransmission Lines - Part II: Goals For TodayHonoréNo ratings yet
- InterPss-A New Generation Power System Simulation Engine PDFDocument8 pagesInterPss-A New Generation Power System Simulation Engine PDFHonoréNo ratings yet
- Exploring Application of Machine Learning To Power System AnalysisDocument3 pagesExploring Application of Machine Learning To Power System AnalysisHonoréNo ratings yet
- InterPss-A New Generation Power System Simulation Engine PDFDocument8 pagesInterPss-A New Generation Power System Simulation Engine PDFHonoréNo ratings yet
- India Vs FranceDocument2 pagesIndia Vs FranceJovanovic Jelena GoranNo ratings yet
- Nursing Home Private Hospital / ICU Nursing Chart: 6 HR 18 HRDocument2 pagesNursing Home Private Hospital / ICU Nursing Chart: 6 HR 18 HRdavidNo ratings yet
- TRF Products Catalogues PDFDocument96 pagesTRF Products Catalogues PDFDanielSantos100% (1)
- Chaper Three Coordinate Transformation MTUDocument12 pagesChaper Three Coordinate Transformation MTUbirukdese677No ratings yet
- SM Piko-MpDocument92 pagesSM Piko-MpSamuel JACOBBONo ratings yet
- Types of VolcanoesDocument21 pagesTypes of VolcanoesAgaManlapazMacasaquitNo ratings yet
- Sensors: Fluorescent Sensors For The Detection of Heavy Metal Ions in Aqueous MediaDocument34 pagesSensors: Fluorescent Sensors For The Detection of Heavy Metal Ions in Aqueous MediaTam Van TranNo ratings yet
- Material Design in ESPDocument41 pagesMaterial Design in ESPWinter BacalsoNo ratings yet
- Chapter 9 CapacitorsDocument11 pagesChapter 9 CapacitorsnNo ratings yet
- Water Managment PlanDocument31 pagesWater Managment Planmehmal malikNo ratings yet
- CQR User Manual-3 PDFDocument98 pagesCQR User Manual-3 PDFJoe GellatlyNo ratings yet
- G Ish 401 Chapter 7 SlaughteringDocument75 pagesG Ish 401 Chapter 7 Slaughteringnrnvbihah26No ratings yet
- Unit 10 Administrative StructureDocument11 pagesUnit 10 Administrative StructurePoco ChanNo ratings yet
- N-1000-III/IV: Installation and Programming ManualDocument121 pagesN-1000-III/IV: Installation and Programming ManualCristian GonzalezNo ratings yet
- Loans and AdvancesDocument9 pagesLoans and AdvancesidealworldNo ratings yet
- Hybrid and Electric BoatsDocument9 pagesHybrid and Electric BoatssuhaNo ratings yet
- JL - Langkat 88 Singgahan-Pelem Pare - Kediri - Jawa Timur 64213 Phone: 0354-396 561 Moblie: 0852 3111 1117-0858 8888 1117Document2 pagesJL - Langkat 88 Singgahan-Pelem Pare - Kediri - Jawa Timur 64213 Phone: 0354-396 561 Moblie: 0852 3111 1117-0858 8888 1117Mita KusniasariNo ratings yet
- CVS-128 128B OME Rev06Document84 pagesCVS-128 128B OME Rev06Ahamed Shiraz ARNo ratings yet
- Balmer Lawrie & Co HRDocument6 pagesBalmer Lawrie & Co HRPraneet TNo ratings yet
- Banking SBI simplySAVE Mar21Document1 pageBanking SBI simplySAVE Mar21UguffcNo ratings yet
- Crisp and ClearDocument5 pagesCrisp and ClearsandeepNo ratings yet
- VISHNU CV With ExperianceDocument2 pagesVISHNU CV With ExperianceoNo ratings yet
- 1701722483.roksim Alone in Space and No Suits at AllDocument28 pages1701722483.roksim Alone in Space and No Suits at AlllolyeetwutNo ratings yet
- BOM100033596 ChasisDocument227 pagesBOM100033596 ChasisFelipe Andrés Camarada SilvaNo ratings yet
- Din 6885Document1 pageDin 6885Riadini Anis Hade50% (2)
- Bearing Component GeneratorDocument2 pagesBearing Component GeneratorAos GidionNo ratings yet