Download as pdf or txt
You might also like
- Operating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Document5 pagesOperating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Michael Beswick0% (1)
- Assignment On Business PlanDocument28 pagesAssignment On Business PlanShantanu Das85% (62)
- How To Bulk Upload WAV Files To Avaya Aura Media Server (AAMS) For Use As Communication Manager 7 AnnouncementsDocument8 pagesHow To Bulk Upload WAV Files To Avaya Aura Media Server (AAMS) For Use As Communication Manager 7 AnnouncementspawarsanjuNo ratings yet
- Ch.1 - Introduction: Study Guide To Accompany Operating Systems Concepts 9Document7 pagesCh.1 - Introduction: Study Guide To Accompany Operating Systems Concepts 9John Fredy Redondo MoreloNo ratings yet
- AyilaraDocument13 pagesAyilaraAremu FaisalNo ratings yet
- Resumen Sistemas Operativos MendezDocument57 pagesResumen Sistemas Operativos MendezPedro Andres FlynnNo ratings yet
- Agenda For TodayDocument23 pagesAgenda For Todayhamna noorNo ratings yet
- Operating System Concepts 9th Edition Study GuideDocument19 pagesOperating System Concepts 9th Edition Study Guidehotfudge2116100% (2)
- Chapter 3-Computer SystemDocument29 pagesChapter 3-Computer SystemMutai K. KennedyNo ratings yet
- 2 OsDocument58 pages2 Osaliahsan007838383No ratings yet
- Assignment Embedded - 2Document7 pagesAssignment Embedded - 2Mahima ChoudharyNo ratings yet
- Secure Architecture and DesignDocument19 pagesSecure Architecture and DesignAbdelmoumen DjazairiNo ratings yet
- 1 IntroductionDocument39 pages1 IntroductionVishvesh SuriyanarayananNo ratings yet
- Operating Systems Lecture Notes: Matthew DaileyDocument31 pagesOperating Systems Lecture Notes: Matthew DaileyMegha HegdeNo ratings yet
- Ch. 6 - Mechanism - Limited Direct ExecutionDocument5 pagesCh. 6 - Mechanism - Limited Direct ExecutionHugo RNo ratings yet
- Presentation 9Document9 pagesPresentation 9Haadi KhanNo ratings yet
- Architectural Support For OSDocument13 pagesArchitectural Support For OSHave No IdeaNo ratings yet
- Os Ut1 QaDocument7 pagesOs Ut1 QaVignesh RaghavareddyNo ratings yet
- Ertos MaterialDocument8 pagesErtos Materialvinod3457No ratings yet
- IL-Module 4Document12 pagesIL-Module 4Kanak RTNo ratings yet
- Os Files SDocument63 pagesOs Files Smohitpar128No ratings yet
- CH 2Document21 pagesCH 2Prince Ali JehangirNo ratings yet
- CS211 Lec 3Document33 pagesCS211 Lec 3Muhammad RafayNo ratings yet
- Lecture Notes On Operating SystemDocument10 pagesLecture Notes On Operating SystemSumit SinghNo ratings yet
- Osy Question BankDocument8 pagesOsy Question BankPratiksha JadhavNo ratings yet
- 3 Embedded Systems - Raj KamalDocument37 pages3 Embedded Systems - Raj KamalAshokkumar ManickamNo ratings yet
- X 86 PrivDocument10 pagesX 86 PrivPK TricksNo ratings yet
- Csc4320 Chapter 1Document48 pagesCsc4320 Chapter 1Prabir Kumar PaniNo ratings yet
- Model AnsDocument17 pagesModel Ansbhanuprasadvishwakar100% (1)
- Unit IV - OSDocument37 pagesUnit IV - OScse21233No ratings yet
- 2mark and 16 OperatingSystemsDocument24 pages2mark and 16 OperatingSystemsDhanusha Chandrasegar SabarinathNo ratings yet
- Operating Systems Solved Papers PDFDocument106 pagesOperating Systems Solved Papers PDFAmreen KhanNo ratings yet
- UntitledDocument5 pagesUntitledritikNo ratings yet
- Operating System: Lecturer Ameer Sameer Hamood University of BabylonDocument33 pagesOperating System: Lecturer Ameer Sameer Hamood University of BabylonMohsen AljazaeryNo ratings yet
- Unit 1.1Document22 pagesUnit 1.1Ayush MehraNo ratings yet
- OS Structure, Processes & Process ManagementDocument19 pagesOS Structure, Processes & Process ManagementAnkita GoelNo ratings yet
- Operating SystemDocument174 pagesOperating SystemHarshini BabyNo ratings yet
- Computer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureDocument23 pagesComputer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureNosreffejDelRosarioNo ratings yet
- 8.processes, IpcDocument78 pages8.processes, Ipcyogeshwari bahiramNo ratings yet
- Principles of Operating SystemDocument4 pagesPrinciples of Operating SystemCristy VegaNo ratings yet
- NSK OS I 13 Solution 1Document7 pagesNSK OS I 13 Solution 1kotreshisnNo ratings yet
- CSS 214 Os-5 2021Document32 pagesCSS 214 Os-5 2021fayyadmuhammad45No ratings yet
- OS UNIT1 SylajaDocument67 pagesOS UNIT1 SylajaHARINo ratings yet
- 02 OperationsDocument19 pages02 OperationsEbbaqhbqNo ratings yet
- Chapter Three OSDocument10 pagesChapter Three OShiruttesfay67No ratings yet
- 1 IntroductionDocument44 pages1 IntroductionShubham TanejaNo ratings yet
- Assingnment No.1: Name: Harsh Kumar ENROLLMENT: EN19CS301131 Batch: C1Document12 pagesAssingnment No.1: Name: Harsh Kumar ENROLLMENT: EN19CS301131 Batch: C1Harsh KumarNo ratings yet
- ES Unit-3Document25 pagesES Unit-3palaji pradeepNo ratings yet
- Interrupt Processing: 1. What Is An Interrupt?Document3 pagesInterrupt Processing: 1. What Is An Interrupt?Sazid AnsariNo ratings yet
- OS Question Bank CS1252Document21 pagesOS Question Bank CS1252Nancy PeterNo ratings yet
- Ch01 Introduction MDocument49 pagesCh01 Introduction MSharada HarwadekarNo ratings yet
- Cs45-Operating Systems: S4 / B.E CseDocument25 pagesCs45-Operating Systems: S4 / B.E CsearivurpNo ratings yet
- Operating Systems Lecture No. 2: Reading MaterialDocument6 pagesOperating Systems Lecture No. 2: Reading MaterialImMalikNo ratings yet
- Os 2 Marks QusDocument49 pagesOs 2 Marks QusSravani Reddy100% (1)
- Lecture 1 - 23SU - Operating System IntroductionDocument45 pagesLecture 1 - 23SU - Operating System IntroductionCheserem TitusNo ratings yet
- Operating System: Cset209Document34 pagesOperating System: Cset209xpershanNo ratings yet
- Os Concepts1Document6 pagesOs Concepts1Asma KomalNo ratings yet
- Chapter 01: Introduction CSS430 Systems ProgrammingDocument27 pagesChapter 01: Introduction CSS430 Systems ProgrammingAlan NguyenNo ratings yet
- OS Notes Module 2Document24 pagesOS Notes Module 2Radhika VenkateshNo ratings yet
- CP0158 12-Jan-2012 RM01Document78 pagesCP0158 12-Jan-2012 RM01Shriram ThiagarajanNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Color of Asbestos: Standard Test Method ForDocument9 pagesColor of Asbestos: Standard Test Method ForShaker QaidiNo ratings yet
- Security in Computing: Elementary CryptographyDocument41 pagesSecurity in Computing: Elementary Cryptographypraveenembd1No ratings yet
- Retro ThesisDocument7 pagesRetro Thesislindagosnellfortwayne100% (2)
- St. Sr. School: Paul'sDocument4 pagesSt. Sr. School: Paul'sAmisha GuptaNo ratings yet
- WebTicket Indemnity FormDocument1 pageWebTicket Indemnity FormTaif KhanNo ratings yet
- Iec 60354Document90 pagesIec 60354Sheraz azamNo ratings yet
- Dbms Assignment 2 Subhamoy Ghosh 6035Document16 pagesDbms Assignment 2 Subhamoy Ghosh 6035Subhamoy GhoshNo ratings yet
- Environmental Management System ImplementationDocument40 pagesEnvironmental Management System Implementationkashif ManzoorNo ratings yet
- 2, 5 Inch Side Door Stripper PDFDocument16 pages2, 5 Inch Side Door Stripper PDFOvRrj AhmedNo ratings yet
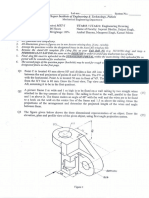
- UTA015Document2 pagesUTA015sans cipher 435No ratings yet
- Working With Engines and Connections - SQLAlchemy 1.4 DocumentationDocument96 pagesWorking With Engines and Connections - SQLAlchemy 1.4 DocumentationLeandro Gabriel KategoraNo ratings yet
- Useful Formulas and CalculationsDocument8 pagesUseful Formulas and CalculationsAnonymous 4ADs7sW8No ratings yet
- Technical Manual - System Description HUAWEI HLR9820 Home Location RegisterDocument45 pagesTechnical Manual - System Description HUAWEI HLR9820 Home Location RegisterRaufrmzNo ratings yet
- Pre-Employment Consent Form: Leah Nikka Telesforo SalvadorDocument3 pagesPre-Employment Consent Form: Leah Nikka Telesforo SalvadorNikka SalvadorNo ratings yet
- Service Manual: Harman/kardonDocument229 pagesService Manual: Harman/kardonSang NhNo ratings yet
- Publications: Year No. Conference Vol. Firm Country Author TitleDocument63 pagesPublications: Year No. Conference Vol. Firm Country Author TitleArjun Chitradurga RamachandraRaoNo ratings yet
- Rodillo Tandem BomagDocument4 pagesRodillo Tandem BomagyasserNo ratings yet
- Richard Coffin Resume - PLAIN BAGELDocument1 pageRichard Coffin Resume - PLAIN BAGELOleksandr BidnykNo ratings yet
- Arts 10 Quarter 3 Week 7 Las # 1Document2 pagesArts 10 Quarter 3 Week 7 Las # 1ariel velaNo ratings yet
- Catalogo Victaulic Pl2022 A GenDocument433 pagesCatalogo Victaulic Pl2022 A GenMohanaNo ratings yet
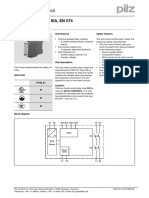
- P1HZ X1 enDocument6 pagesP1HZ X1 enDiiani AmayaNo ratings yet
- Dissertation Research Aims and ObjectivesDocument7 pagesDissertation Research Aims and ObjectivesHelpWritingACollegePaperCanada100% (1)
- GRADESDocument3 pagesGRADESAcele Dayne Rhiane BacligNo ratings yet
- Anchor Dowel FixingDocument7 pagesAnchor Dowel FixingbittuchintuNo ratings yet
- Database Fundamentals: Lecturer: Rana SalahDocument27 pagesDatabase Fundamentals: Lecturer: Rana Salahmohamed refayNo ratings yet
- Sofimshc 1Document109 pagesSofimshc 1Chris LumyNo ratings yet
- Format of Ielts General Training LettersDocument24 pagesFormat of Ielts General Training LettersmanwinderNo ratings yet
- Acr FormDocument58 pagesAcr FormVINAY TANWARNo ratings yet